 Für einen individuellen Ausdruck passen Sie bitte die
Für einen individuellen Ausdruck passen Sie bitte dieEinstellungen in der Druckvorschau Ihres Browsers an. Regelwerk; BGI/GUV-I / DGUV-I

| Für einen individuellen Ausdruck passen Sie bitte die Einstellungen in der Druckvorschau Ihres Browsers an. Regelwerk; BGI/GUV-I / DGUV-I | |
BGI 5123 / DGUV-Information 209-074 - Industrieroboter
Deutsche Gesetzliche Unfallversicherung (DGUV) Information
(Ausgabe 06/2008![]() ; 01/2015)
; 01/2015)
Vorbemerkung
Diese DGUV Information wurde im Sachgebiet Maschinen, Anlagen, Fertigungsautomation und -gestaltung des Fachbereichs Holz und Metall der DGUV erstellt. Sie wendet sich insbesondere an die Praktiker im Betrieb. In der DGUV Information werden die wichtigsten sicherheitstechnischen Merkmale von Industrierobotern aufgezeigt. Ebenso spricht sie die wichtigsten Anforderungen aus den aktuell geltenden Rechtsquellen an und bereitet sie praxisnah auf. Sie soll einen schnellen Zugriff auf alle zu berücksichtigenden Aspekte bei Planung, Abnahme, Überwachung und Betrieb von Industrierobotern und Industrieroboteranlagen ermöglichen.
Hinsichtlich der Kommentierung von Anforderungen aus Gesetzestexten und Normen wird auf die Verbindlichkeit der Originalquellen verwiesen. Insbesondere kann es vorkommen, dass sich Anforderungen aus Rechtsvorschriften und Normen nach Drucklegung ändern. Vor Anwendung der jeweiligen Schrift sollte daher der aktuelle Stand beim Herausgeber geprüft werden.
Besonderer Dank gilt den Herren Richard Schwarz, Wieland Link und Dr. Matthias Umbreit für die Erstellung der Entwurfsfassung dieser DGUV Information.
Für weitergehende Informationen wird auf Fachliteratur bzw. auf die für Industrierobotersicherheit zutreffende Normenreihe
DIN EN ISO 10218 "Industrieroboter - Sicherheitsanforderungen" verwiesen.
Diese Schrift ersetzt die Berufsgenossenschaftliche Information "Industrieroboter" (BGI 5123) vom Juni 2008.
1 Einführung
1.1 Robotertypen
Roboterkinematik
Der mechanische Aufbau eines Industrieroboters besteht aus einer räumlichen Anordnung von Bewegungsachsen. Die Achsen 1 - 3 werden als Haupt-, die Achsen 4 - 6 als Neben- oder Handachsen bezeichnet. In Abhängigkeit von der ausführbaren Achsbewegung (translatorisch, rotatorisch) unterscheidet man verschiedene Robotertypen.
Anordnung der Hauptachsen
Roboter unterscheiden sich hauptsächlich durch die Art der Kinematik der Hauptachsen.
Unterschieden wird hier zwischen Achsen mit translatorischer Bewegung (T) und Achsen mit rotatorischer Bewegung (R).
Serielle Kinematiken
Serielle Kinematiken bestehen aus einer Anzahl von Armgliedern, die mit Gelenken verbunden sind. Das letzte Gelenk trägt das Werkzeug.
Abb. 1 Kinematik der Hauptachsen [A]
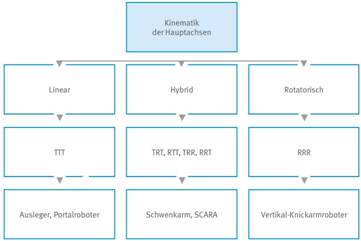
Abb. 2 Vertikal Knickarmroboter RRRRRR_Kinematik [A]

Abb. 3 Die gebräuchlichsten Anordnungen von Hauptachsen bei seriellen Kinematiken und die hieraus resultierenden Koordinaten [A]

In der Roboterhand sind weitere Bewegungsachsen zur Positionierung und Orientierung des Werkzeuges/Greifers angeordnet.
Vertikal-Knickarmroboter
Der gebräuchlichste Vertreter der seriellen Kinematiken ist der Knickarmroboter. Ein klassischer Knickarmroboter hat drei rotatorische Grundachsen und mindestens eine, meistens aber drei rotatorische Handachsen. Die Vorteile dieser Kinematik liegen im geringen Platzbedarf und in den universellen Einsatzmöglichkeiten (Abbildung 4).
Abb. 4 Vertikal-Knickarmroboter [A]

Durch Montage zweier Knickarmroboter auf einer gemeinsamen Säule erweitert sich die Universalität nochmals (Abbildung 5).
Abb. 5 Dual Arm Roboter [B]

Der Begriff "Scara-Roboter" steht für "Selective Compliance Assembly Robot Arm". Diese Roboter haben meist vier Achsen; die erste, zweite und vierte Achse sind rotatorisch, die dritte Achse ist translatorisch. Dieser Robotertyp ist aufgrund seiner Kinematik zu sehr schnellen Bewegungen fähig und wird vor allem für Pick-and-Place-Anwendungen eingesetzt (Abbildung 6).
Abb. 6 Scara-Roboter [A]

Portalroboter werden u. a. zur Automatisierung von Werkzeug- oder Spritzgussmaschinen verwendet.
Durch die Be- und Entladung von oben wird die freie Zugänglichkeit zur Maschine für Wartungs- und Rüstarbeiten gewährleistet.
Portalroboter gibt es in vielen Varianten.
Die gebräuchlichste Ausführung ist das Linienportal, das aus einer horizontalen und einer vertikalen Linearachse besteht, an die entweder direkt ein Greifer oder dazwischen noch zusätzliche rotatorische Handachsen angebaut sind.
Flächenportale haben noch eine zweite Horizontalachse. Dadurch erhält man große Arbeitsräume (Abbildung 7).
Portal- und Knickarmroboterwerden auch kombiniert.
An einer horizontalen Portalachse wird seitlich oder hängend ein 6-Achs Roboter montiert.
Damit erhält man auch unter räumlich begrenzten Bedingungen maximale und flexible Arbeitsräume.
Abb. 7 Portalroboter/Flächenportal [C]

Parallele Kinematiken
Die Arme des Parallelkinematik-Roboters (auch Delta-Roboter oder einfach Parallelroboter) sind auf einer gemeinsamen Grundplatte gelagert. Varianten dieser Kinematik mit 3 bis 6 Achsen sind gängig (Abbildung 8 und Abbildung 9). Er kann entweder an der Decke hängend oder auf den Boden montiert werden.
Durch die koordinierte Ansteuerung aller Motoren wird eine dreidimensionale Bewegung des Endeffektors erreicht. Werden mehr als 3 unabhängig angetriebene Arme verwendet, lässt sich das Werkzeug auch drehen und/oder kippen.
Parallelkinematik-Roboter kommen zum Einsatz, wenn einfachere Bewegungsabläufe mit hoher Wiederholgenauigkeit und hoher Geschwindigkeit in einem begrenzten Arbeitsraum gefordert sind.
Typische Anwendungen von Delta-Robotern sind schnelle Pick-and-Place-Anwendungen mit teilgeordneten Erzeugnissen auch mit Fließbandverfolgung für Handhabungs-, Montage- und Verpackungsaufgaben (Abbildung 8).
Hexapod-Roboter eignen sich vor allem für Bearbeitungsaufgaben z.B. zum Bohren, Schleifen, Trennen oder für Montageprozesse. Sie zeichnen sich durch eine extreme Steifigkeit bei hoher Wiederholgenauigkeit aus. Der Arbeitsbereich ist sehr begrenzt (Abbildung 9).
Abb. 8 Delta-Roboter (Flexpicker) [D]

Abb. 9 Hexapod-Roboter [E]

1.2 Roboteranwendungen
Einsatzgebiete für Industrieroboter
Industrieroboter findet man in vielen Bereichen der Industrie, z.B. Automobilhersteller und Zulieferer, Luft- und Raumfahrt, Nahrung und Genussmittel, Textil, Holz und Möbel, Druck und Papier, Gummi und Kunststoff, Chemie und Pharmazie, Haushaltsgeräteindustrie, Feinmechanik, Bau, Gießerei, Keramik und Stein usw. Daneben finden sie auch bereits Einsatz in Forschung und Ausbildung oder in der Landwirtschaft.
Roboter werden heute vielseitig verwendet, z.B.:
Abb. 10 Plasmaschneiden [F]

Abb. 11 Schreitroboter [G]

Die sicherheitstechnischen Anforderungen für Industrieroboter und deren Anwendungen in Roboteranlagen werden in den nachfolgenden Kapiteln ausführlich beschrieben.
Für nichtindustrielle Roboter enthält diese Schrift im Folgenden nur einen kurzen Überblick.
Nichtindustrielle Roboteranwendungen
Neben den Industrieanwendungen findet man Roboter heute z.B. auch im Entertainmentgeschäft, in der Medizintechnik, als Serviceroboter oder im Militär.
Die für Industrieroboter geltenden Produktsicherheitsnormen gelten hier nicht.
Solange aber keine entsprechenden Normen für den nichtindustriellen Bereich zur Verfügung stehen, dürfen die in der Norm für Industrieroboter festgelegten Anforderungen auch auf nichtindustrielle Applikationen angewendet werden.
Dies ist in EN ISO 10218-1 beschrieben (siehe auch Abschnitt 2.1.2).
Abb. 12 Entertainmentroboter [A]

Entertainmentroboter
Entertainmentroboter sind als Fahrgeschäfte vom Anwendungsbereich der Maschinenrichtlinie ausgeschlossen. Sie zählen zu den "Fliegenden Bauten", deren Sicherheitsanforderungen in der Europäischen Norm EN 13814 [4] festgelegt sind.
Besondere Anforderungen sind an den lichten Raum gestellt. Das ist ein Raum um die Gondel, der im Betriebs- und Fehlerfall weder von der eigenen Mechanik noch von der umgebenden Kulisse verletzt werden darf. Die Einhaltung dieses lichten Raumes wird meist mit mechanischen Achsbereichsbegrenzungen realisiert. Steuerungstechnische Lösungen zur Achs- oder Raumbegrenzung haben hier den Nachteil, dass sicher reproduzierbare Anhaltewege nur mit hohem Aufwand zu realisieren sind.
Medizinroboter
Medizinroboter sind Medizingeräte und fallen in den Anwendungsbereich der Europäischen Medizingeräterichtlinie 93/42/EG [12].
Die zu dieser EG-Richtlinie gelisteten Normen erfassen nur unvollständig die von Robotern ausgehenden Gefährdungen. Daher ist es sinnvoll, Schutzmaßnahmen anzuwenden, wie sie in EN ISO 10218-1 beschrieben sind (z.B. die reduzierte Geschwindigkeit und andere Anforderungen an kollaborierende Roboter).
Serviceroboter
Serviceroboter dienen dazu, z.B. Arbeiten im Haushalt zu erledigen. Für einzelne Serviceroboter existieren bereits spezielle Normen, z.B. für Roboter-Rasenmäher (EN 60335-2-107). Die Anforderungen lassen sich aber nicht auf andere Roboter und Serviceroboter übertragen.
Abb. 13 Medizinroboter [A]

1.3 Unfallgeschehen und besondere Gefahren an Industrierobotern
Verglichen mit anderen Maschinen muss bei Industrierobotern neben bekannten Gefahren, z.B. Einquetschen zwischen festen und beweglichen Teilen, Herausschleudern von Teilen, auch mit Gefahren gerechnet werden, die für andere Maschinen untypisch sind. Dazu zählt vor allem die Komplexität des Fertigungsablaufs, dessen Gefahren allein durch Beobachtung nicht eingeschätzt werden können.
Gefahren aufgrund der Komplexität der Fertigung zeigen sich vor allem durch:
Unfallursachen sind u. a. technischer Art, wie z.B. das Versagen von Bauteilen. Andere Ursachen, wie z.B. Absturz oder das Umgehen von Schutzeinrichtungen, gehen jedoch ebenfalls mit in die Statistik ein.
Die von der Deutschen Gesetzlichen Unfallversicherung (DGUV) erfassten Unfallzahlen sind bei Industrierobotern wie auch in anderen Gewerbezweigen trotz konjunktureller Schwankungen insgesamt rückläufig. Dies wird deutlicher, wenn die Unfallzahlen im Verhältnis zu den installierten Anlagen betrachtet werden. Im Zeitraum 2005 bis 2012 ist die Anzahl der in Deutschland installierten Roboteranlagen von 126.000 auf 161.988 gestiegen. Die sogenannte Roboterdichte, d. h. die Anzahl der Roboter pro 10.000 Beschäftigte, betrug im Jahr 2012 in Deutschland 273. Dies ist die dritthöchste weltweit [17].
Abb. 14 Meldepflichtige Arbeitsunfälle 1) an/mit Industrieroboteranlagen 3) in Deutschland [H]

| 1) | Arbeitsausfall von mehr als drei Tagen |
| 2) | Zahlung von Unfallrenten, z.B. bei Verlust von Gliedmaßen oder tödlicher Arbeitsunfall |
| 3) | Neben Unfällen an Robotern werden auch Unfälle an automatischen Maschinen und Transferanlagen erfasst. Darunter fallen z.B. Ein- und Zweiachssysteme (z.B. Portale) und Handhabungssysteme, jedoch keine Werkzeugmaschinen. |
2 Rechtsgrundlagen
2.1 Europäische Rechtsvorschriften für Industrieroboter
2.1.1 Europäische Rechtsvorschriften
Die Europäische Union (EU) brachte für die Industrie weitreichende Veränderungen auf dem Vorschriftensektor, sowohl zur sicherheitsgerechten Gestaltung von Maschinen und Anlagen als auch für die Industriebetriebe, welche sie betreiben.
Die nationalen Vorschriften wurden weitgehend durch europaweit geltende Vorschriften abgelöst.
Im Wesentlichen sind das EG-Richtlinien. Alle Mitgliedstaaten der EU sind verpflichtet, die europäischen Vorschriften in ihr nationales Recht zu übernehmen und ihre eigenen Vorschriften in diesem Bereich zurückzuziehen. Dieser Vorgang ist auch unter dem Begriff der Harmonisierung bekannt und diese Maßnahme ist eine der Grundvoraussetzungen für den "Freien Warenverkehr" innerhalb der EU.
Alle Waren/Produkte, die in der EU in Verkehr gebracht werden sollen, müssen also die auf sie zutreffenden EU-Vorschriften erfüllen, ganz gleich, ob sie in der EU hergestellt oder in die EU eingeführt werden.
Abb. 15 Europäischer Rechtsrahmen für Maschinen [H]

Richtlinien unter Artikel 153 sind Rechtsgrundlage für den betrieblichen Arbeits- und Gesundheitsschutz und legen die Grundpflichten von Arbeitgebern und Arbeitnehmern fest.
Sie enthalten nur Mindestanforderungen, so dass auf nationaler Ebene auch höhere Schutzanforderungen gestellt sein können. Die nationalen Regelungen können von Mitgliedsstaat zu Mitgliedsstaat unterschiedlich sein (Abbildung 15).
Richtlinien unter Artikel 114 des EG-Vertrags schaffen die Grundlagen für den freien Warenverkehr innerhalb der Mitgliedsstaaten, indem sie für Produkte einheitliche grundlegende Sicherheitsanforderungen stellen. In ihrer Umsetzung besteht kein nationaler Spielraum. Äußeres Kennzeichen am Produkt ist das CE-Zeichen (CE).
Jede Roboterzelle oder Roboteranlage muss zum Zeitpunkt des Bereitstellens auf dem Markt mit einer EG-Konformitätserklärung und mit einem CE-Zeichen versehen werden.
Die wichtigsten EG-Richtlinien für Industrieroboteranlagen sind:
Darüber hinaus können Industrieroboteranlagen von weiteren EG-Richtlinien erfasst sein, z.B. Druckgeräterichtlinie oder Druckbehälterrichtlinie [16]. Die zutreffenden EG-Richtlinien müssen in der EG-Konformitätserklärung aufgeführt werden (siehe Abschnitt 3.1).
Die EG-Richtlinien unter Artikel 114 wenden sich an die Hersteller von Produkten und wurden nach dem so genannten neuen Ansatz erstellt. Danach werden in den betreffenden Richtlinien nicht die technischen Anforderungen im Einzelnen niedergelegt.
Die Richtlinien nach dem neuen Ansatz enthalten nur die zwingenden und grundlegenden Sicherheits- und Gesundheitsanforderungen.
Die EG-Richtlinien werden durch das deutsche Produktsicherheitsgesetz (ProdSG) in nationales Recht umgesetzt.
Damit die Hersteller die Übereinstimmung mit diesen grundlegenden Anforderungen leichter nachweisen können und damit die Übereinstimmung überprüft werden kann, werden auf Mandat der Europäischen Kommission Normen erarbeitet, "deren Gegenstand die Verhütung von Risiken ist, die sich aus der Konstruktion und dem Bau von Maschinen ergeben können", sogenannte harmonisierte Normen (siehe Abschnitt 2.1.2).
Abb. 16 Welt der Normen [G]

Europäische Normenorganisationen
CEN, CENELEC und ETSI sind die drei großen europäischen Normungsorganisationen und alleinig ermächtigt, die unter den EG-Richtlinien urandatierten Normen herauszugeben.
Sie haben ihren Sitz in Brüssel.
CENELEC ist verantwortlich für die Normung im elektrotechnischen Bereich, ETSI für die Normung im Telekommunikationsbereich und CEN für die Normung in allen übrigen technischen Bereichen.
| CEN = | Comite Europeen de Normalisation; |
| CENELEC = | Comite Europeen de Normalisation Electrotechnique |
| ETSI = | European Telecommunications Standards Institute |
Internationale Normung
ISO, IEC und ITU sind die internationalen Gegenstücke zu den europäischen Normungsorganisationen.
Ihr Sitz ist in Genf. IEC ist verantwortlich für die Normung im elektrotechnischen Bereich, ITU für die Normung im Telekommunikationsbereich und ISO für die Normung in allen übrigen technischen Bereichen.
| ISO = | International Organization for Standardization |
| IEC = | International Electrotechnical Commission |
| ITU = | International Telecommunication Union |
Zusammenarbeit zwischen europäischer und internationaler Normung
Es existieren Übereinkommen zwischen ISO und CEN (Wiener Vereinbarung) sowie zwischen IEC und CENELEC (Dresdner Vereinbarung), Normungsarbeit möglichst nur noch auf internationaler Ebene durchzuführen. So erarbeitete Normen werden dann ins europäische Normenwerk übernommen. Damit wird erreicht, dass die Anforderungen aus europäischen und aus internationalen Normen übereinstimmen.
2.1.2 Harmonisierte Normen
Harmonisierte Normen sind Normen, die durch die europäischen Normungsorganisationen im Auftrag der Europäischen Kommission erarbeitet werden. Sie konkretisieren die grundsätzlichen Anforderungen der EG-Richtlinien. Im Anhang ZA einer harmonisierten Norm wird angegeben, welche Abschnitte der jeweiligen Norm die wesentlichen Anforderungen der EG-Richtlinie erfüllen.
Im Amtsblatt der EU werden die Fundstellen der harmonisierten Normen neben dem Datum des Beginns der Konformitätsvermutung und gegebenenfalls den Übergangsfristen veröffentlicht. Sobald die Veröffentlichung im Amtsblatt der EU erfolgt ist, gilt die sogenannte Konformitätsvermutung. Das heißt, bei Anwendung der Norm kann davon ausgegangen werden, dass die grundlegenden Anforderungen der betreffenden Richtlinie erfüllt werden. Trotz des daraus resultierenden hohen Stellenwerts harmonisierter Normen bleibt deren Anwendung freiwillig. Wendet der Hersteller von Maschinen harmonisierte Normen nicht oder nur teilweise an, muss er in den Technischen Unterlagen neben der Risikobeurteilung die Schritte angeben, die zur Einhaltung der grundlegenden Sicherheits- und Gesundheitsschutzanforderungen eingeleitet wurden.
Harmonisierte Normen müssen auch in nationale Normen umgesetzt werden. Dafür ist in Deutschland das Deutsche Institut für Normung (DIN) zuständig. Die Fundstellen dieser Normen werden dann im "Gemeinsamen Ministerialblatt" veröffentlicht.
Abb. 17 Es sind 3 Normentypen zu unterscheiden: A-Normen, B-Normen und C-Normen [G]

A-Normen werden als Grundnormen bezeichnet, da sie sich grundlegend mit Gefährdungen und Risiken befassen (Katalog aller bekannten Gefährdungen) und vorgeben, wie Gefährdungsanalysen und Risikobeurteilungen zu erstellen sind. Derzeit existiert nur eine A-Norm: EN ISO 12100.
B-Normen werden auch als Gruppennormen bezeichnet, welche als Typ B1-Normen Sicherheitsaspekte diskutieren, wie z.B. Körpergrößen und Bewegungsgeschwindigkeiten des Menschen, seine Empfindsamkeit hinsichtlich berührbarer Oberflächentemperaturen usw.
Als Typ B2-Normen behandeln sie verwendbare Schutzeinrichtungen, z.B. Zweihandschaltungen, Lichtschranken, Lichtgitter, Lichtvorhänge, Laserscanner, Schaltplatten, Schaltmatten, trennende Schutzeinrichtungen (z.B. Umzäunungen, überwachte Zugangstüren in Umzäunungen) sowie NOT-HALT-Einrichtungen.
C-Normen sind Europäische Produktnormen, welche einen Maschinentyp sicherheitstechnisch vollständig beschreiben, wie z.B. Industrieroboter, Pressen, Werkzeugmaschinen usw.
Wenn eine Typ-C-Norm von einer oder mehreren Festlegungen abweicht, die in einer Typ-A-Norm oder einer Typ-B-Norm behandelt werden, haben die Festlegungen der Typ-C-Norm Vorrang.
C-Norm für Industrieroboter
Für Industrieroboter steht eine zweiteilige C-Norm zur Verfügung: die EN ISO 10218-1 und -2: Industrieroboter - Sicherheitsanforderungen - Teil 1 Roboter und Teil 2 Robotersysteme und Integration.
EN ISO 10218-1
Die EN ISO 10218-1 gilt für Industrieroboter, d. h. automatisch gesteuerte, frei programmierbare Mehrzweck-Manipulatoren, die in drei oder mehr Achsen programmierbar sind und zur Verwendung in der Automatisierungstechnik entweder an einem festen Ort oder beweglich angeordnet sein können [5]. Die Norm stellt Anforderungen und gibt Anleitung für inhärent sichere Konstruktion, Schutzmaßnahmen und die Benutzerinformation. Sie beschreibt grundlegende Gefährdungen durch Roboter und die Beseitigung oder hinreichende Verringerung der damit verbundenen Risiken. Sie gilt nicht für Roboter außerhalb des industriellen Bereichs, kann aber darauf angewendet werden (wenn keine anderen spezifischen Normen vorliegen).
EN ISO 10218-2
Dieser Teil der ISO 10218 gibt eine Anleitung, wie die Sicherheit bei der Integration und dem Einbau von Robotern sichergestellt werden kann [6]. Er versteht sich ergänzend und zusätzlich zur ISO 10218-1.
Die Norm leitet dazu an, die besonderen Gefährdungen, die mit der Integration, dem Einbau und den Anforderungen an die Verwendung von Industrierobotern einhergehen, zu identifizieren und auf diese einzugehen. Die Norm beinhaltet die Schutzmaßnahmen für die Roboterintegration einschließlich der Risiken, die aus Applikation, Werkzeug und Werkstück resultieren.
2.2 "Wesentliche Veränderungen" an Roboteranlagen
Im früheren Geräte- und Produktsicherheitsgesetz (GPSG) war generell verfügt worden, dass Maschinen und maschinelle Anlagen, wenn sie nach dem erstmaligen Inverkehrbringen später wesentlich verändert werden, erneut den zum Zeitpunkt der Veränderung geltenden Vorschriften anzupassen sind. Dies heißt im Klartext: Vergabe eines neuen CE-Zeichens im Falle einer Wesentlichen Veränderung. Diese Regelung ist in dem heute gültigen Produktsicherheitsgesetz (ProdSG) nicht mehr so enthalten.
Mit der Anpassung des Produktsicherheitsgesetzes an die Verordnung EG 765/2008 entfällt der Begriff "Wesentlich veränderte Produkte". Eine Änderung des Sachverhaltes ist damit jedoch nicht verbunden.
Die Veröffentlichung eines entsprechenden Interpretationspapiers durch das Bundesministerium für Arbeit und Soziales stand zum Zeitpunkt der Drucklegung dieser DGUV Information unmittelbar bevor.
Das Überholen und Instandsetzen, ein Werkzeugwechsel und auch die Verbesserung des Schutzniveaus gelten allgemein als "Nicht Wesentliche Veränderung".
Aber wann ist nun ein Umbau einer Roboteranlage eine Wesentliche Veränderung? Die o. g. Aussagen beinhalten naturgemäß einen weiten Graubereich. Die aktuelle Fachmeinung zum Thema "Wesentliche Veränderung von Maschinen" geht heute vor allem von folgender Kernfrage aus:
Kommen durch den Umbau neue Risiken in erheblichem Umfang hinzu, welche mit dem vorhandenen Schutzkonzept nichtvereinbar sind?
Wenn diese Frage mit ja beantwortet werden kann, handelt es sich um eine Wesentliche Veränderung, die eine neue EG-Konformitätsbewertung erfordert. Die Entscheidung obliegt demjenigen, in dessen Namen eine Roboteranlage geändert/verändert wird und ist mit aller Sorgfalt zu treffen.
Wichtig ist, dass im Falle einer Nicht Wesentlichen Veränderung die Umbaumaßnahmen an einer bestehenden Anlage grundsätzlich so durchgeführt werden, dass die geänderten/veränderten Teile der aktuellen/neuen Vorschriftenlage entsprechen. Das lässt sich nicht immer vollständig erreichen, z.B. bei der Berechnung der Performance Level für Steuerungen. Jedoch sollten zumindest die ausgewählten Komponenten dem aktuellen, neuen Stand der Sicherheitstechnik entsprechen.
"Performance Level = Diskreter Level, der die Fähigkeit von sicherheitsbezogenen Teilen einer Steuerung spezifiziert, eine Sicherheitsfunktion unter vorhersehbaren Bedingungen auszuführen" (siehe auch Abschnitt 4.3).
Diese Vorgehensweise ist insoweit von Bedeutung, als dass mit jedem Umbau auch eine Verbesserung der Sicherheit der Gesamtanlage einhergeht, obwohl dies streng genommen nach Betriebssicherheitsverordnung nicht gefordert wird. Wenn die geänderten Teile an einer bestehenden Anlage jedoch weitgehend dem heutigen Stand der Technik bzw. den Anforderungen der Maschinen-RL entsprechen, verliert die Frage zunehmend an Bedeutung, ob es sich um eine Wesentliche Veränderung handelt oder nicht. In der Praxis handelt es sich erfahrungsgemäß in den meisten Fällen um Nicht Wesentliche Veränderungen.
Hierbei ist unbedingt festzuhalten, dass auch für Nicht Wesentliche Veränderungen ein rechtlicher Rahmen existiert, nämlich der nach der Betriebssicherheitsverordnung. Danach ist derjenige, der den Umbau veranlasst, verpflichtet - ähnlich wie nach Maschinenrichtlinie - eine Gefährdungsbeurteilung durchzuführen und zu dokumentieren. Auch außerordentliche Sicht- und Funktionsprüfungen sind vorzusehen.
Die Pflicht zur Dokumentation gilt somit für Wesentliche Veränderungen und Nicht Wesentliche Veränderungen gleichermaßen. Dies umfasst z.B. die Ergänzung der Gefährdungsbeurteilungen/Risikobeurteilungen, Schaltpläne, Betriebsanleitungen, SPS-Programme, Wartungs- und Inspektionsanleitungen, Instandhaltungsanleitungen und ggf. Reinigungshinweise. Im Fall einer Wesentlichen Veränderung ist zusätzlich eine neue EG-Konformitätserklärung auszustellen.
Abschließend sei darauf hingewiesen, dass auch die Dimension eines Umbaus eine Rolle spielt. Wird bei einem Umbau praktisch eine neue Anlage errichtet, kommt dies einem erstmaligem Inverkehrbringen gleich, mit den entsprechenden Rechtsbestimmungen nach EG-Richtlinien (siehe auch nachfolgende Beispiele).
Beispiele für Nicht Wesentliche Veränderungen
Beispiele für Wesentliche Veränderungen
Zusatzinformation:
Im Fall einer Wesentlichen Veränderung müssen Roboter und Roboteranlagen den aktuell geltenden Rechtsvorschriften entsprechen. Dazu zählt die EN ISO 10218 Teile 1 und 2, welche auch die Steuerungsnorm EN ISO 13849-1 mit Performance Level d beinhaltet. Die sicherheitsrelevanten Steuerungen müssen jedoch im Fall einer Wesentlichen Veränderung noch nicht zwingend dem Schutzniveau dieser Norm angepasst werden, da dies aufgrund der fehlenden Datenbasis zur Berechnung der Performance Level meistens nicht möglich ist. Es genügt in diesem Fall, wenn die sicherheitsrelevanten Stromkreise einer Roboteranlage wie z.B.:
mindestens der Kategorie 3 gemäß EN 954-1 entsprechen (Zweikanaligkeit).
Abb. 18 Pressenverkettung [I]

Dies gilt auch für Nicht Wesentliche Veränderungen, wenn z.B. neue Roboter in bestehenden Altanlagen erneut verwendet werden [18].
Siehe hierzu auch Abschnitt 4.
Automatisierung von Altmaschinen
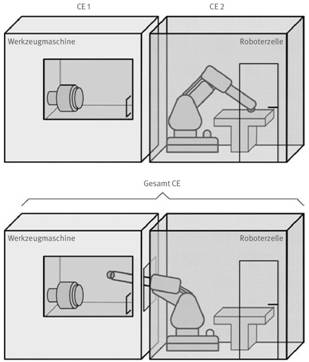
In vielen Fällen werden Altmaschinen automatisiert, z.B. durch Roboterbeschickung anstelle manueller Beschickung an Bearbeitungsmaschinen. In einem solchen Fall stellt sich die Frage, ob eine getrennte Bewertung möglich ist:
Eine solche Vorgehensweise ist geeignet, wenn die sicherheitsrelevanten Schnittstellen klar beschreibbar sind. Die Schnittstellen sind z.B. solche für Not-Halt- und Schutztürkreise. Sie müssen durch Schaltpläne genau dokumentiert werden, sodass jederzeit ersichtlich ist, wie die Signale von Maschine A an Maschine B und umgekehrt weitergegeben werden. Es sollte ggf. Beratung durch den zuständigen Unfallversicherungsträger eingeholt werden.
2.3 Roboteranlagen/Verkettungen
Nach EG-Maschinenrichtlinie unterliegen nicht nur solche Maschinen den "CE-Bestimmungen", die als fertige Einheit geliefert, aufgestellt und in Betrieb genommen werden, sondern auch solche, die aus vollständigen und unvollständigen Maschinen zusammengebaut werden und als Gesamtheit funktionieren. Diese Gesamtheiten von Maschinen (Verkettungen) sind im Roboterbereich sehr häufig, z.B. Pressenverkettungen oder Fertigungslinien im Automobilbau (Abbildung 18 und Abbildung 19). Genauso gibt es im Roboterbereich aber auch Anlagen, bei denen jede einzelne Station noch als Einzelmaschine betrachtet werden kann, d. h. ohne Verkettung. Wie wird nun aber unterschieden? Oder genauer: Ab wann darf eine Anordnung von Maschinen nicht mehr mit einzelnen CE-Zeichen und Konformitätserklärungen ausgestattet werden, sondern muss mit einem übergeordneten CE-Zeichen nebst Konformitätserklärung versehen werden?
Abb. 19 Lackieranlage [D]

Zur Beantwortung dieser Frage sei auf das Interpretationspapier des Bundesministeriums für Arbeit und Soziales verwiesen [1]. In diesem Interpretationspapier wird eine sehr gute Eingangsfragestellung formuliert:
Dies ist z.B. bei einer Pressenverkettung der Fall: Der Presseneinrichter kann nicht gefahrlos die Presse einrichten, wenn nicht gleichzeitig sichergestellt ist, dass der Zuführ- und Entnahmeroboter in einem sicheren Zustand ist. Also handelt es sich um eine Verkettung von Presse und Roboter.
In einer Fertigungslinie im Automobilrohbau ist in der Regel eine Verkettung durch fördertechnische Einrichtungen zum Weitertransport der Karossen gegeben: Beim Betreten eines Zellenbereiches muss sichergestellt sein, dass auch die mit der Nachbarzelle verbundene Fördertechnik sicher abgeschaltet wird. Somit handelt es sich auch hier um eine verkettete Anlage im sicherheitstechnischen Sinn.
Ein rein funktionelles Zusammenwirken ist nicht ausreichend, um eine Verkettung im Sinne der Maschinenrichtlinie herbeizuführen. Dies wird auch aus dem Ablaufdiagramm des zuvor genannten Interpretationspapiers deutlich (Abbildung 20). Ebenso ist eine übergeordnete Not-Halt-Einrichtung allein kein Kriterium für eine verkette Anlage.
Wenn es sich jedoch um eine Verkettung handelt, werden i. d. R. die Sicherheitsfunktionen, wie z.B. Not-Halt, Schutztürverriegelungskreise und Zustimmungskreise, anzupassen sein. Eine Erläuterung von sich überschneidenden Wirkbereichen von Sicherheitsfunktionen befindet sich auch in EN ISO 11161 [7].
Wie im Einzelnen vorzugehen ist, d. h. welcher Schutztürkreis z.B. welchen benachbarten Kreis mit erfasst, muss das Ergebnis einer Risikobeurteilung der Gesamtanlage sein. Diese Risikobeurteilung kann auf vorhandene Risikobeurteilungen der Einzelmaschinen aufbauen, sodass nur die Schnittstellen betrachtet werden müssen.
Abb. 20 Ablaufdiagramm nach Interpretationspapier des Bundesministerium für Arbeit und Soziales BMAS [1]

Mindestanforderung: Zur Verkettung vorgesehene Maschinen, die für sich jedoch auch als Einzelmaschine verwendungsfertig sind, müssen mit den üblichen Begleitdokumenten versehen sein (EG-Konformitätserklärung, CE-Zeichen, Betriebsanleitung). Bei unvollständigen Maschinen sind Einbauerklärung und Montageanleitung erforderlich. Auf Folgendes sollte bei der Bestellung der Einzelmaschinen und unvollständigen Maschinen, die zu einer verketteten Anlage zusammengebaut werden, zusätzlich geachtet werden. Die Aufzählung geht über die gesetzlichen Mindestanforderungen hinaus:
Derjenige, der die Verkettung übernimmt, muss dann folgende Dokumente erstellen:
Bei sehr großen Anlagen können sich Verkettungen mitunter über gesamte Produktionshallen, in manchen Fällen sogar über mehrere Gebäude erstrecken. In solchen Fällen müssen sinnvolle Schnittstellen geschaffen werden. Als Schnittstellen bieten sich z.B. Nacharbeitsplätze oder Pufferspeicher an.
Abb. 21 Maschinenverkettung - Sicherheitstechnischer Zusammenhang [H]
3 Betriebsanleitung und Technische Dokumentation
3.1 Technische Dokumentation für Maschinen
Die technische Dokumentation für Maschinen setzt sich zusammen aus den technischen Unterlagen und der Betriebsanleitung.
3.1.1 Technische Unterlagen für Maschinen
Die technischen Unterlagen beinhalten alle Dokumente, die zur Beurteilung der Übereinstimmung der Maschine mit den Anforderungen der Maschinenrichtlinie notwendig sind. Sie müssen den zuständigen Behörden auf begründetes Verlangen vorgelegt werden und sind nach Fertigstellung der Maschine 10 Jahre bereitzuhalten. Bei Serienfertigung beginnt dieser Zeitraum nach Fertigstellung der letzten Maschine der Serie.
3.1.2 Betriebsanleitung
Die Betriebsanleitung muss in der (den) Amtssprachen) des Landes, in dem die Maschine zum ersten Mal in Verkehr gebracht wird, und in der Ursprungsversion mitgeliefert werden. Die Informationen müssen eine eindeutige Zuordnung zum Maschinentyp haben. Sie sollten so einfach und knapp wie möglich gehalten sein. Begriffe sollten durchgängig verwendet und spezielle Fachbegriffe sollten erklärt werden.
Wird die Betriebsanleitung auf Datenträger weitergegeben, sind zumindest die sicherheitsbezogenen Informationen zusätzlich in Papierform zur Verfügung zu stellen.
Schaltpläne, außer den schon erwähnten Schnittstellenplänen, die für das Einrichten und die Installation erforderlich sind, müssen nicht mitgeliefert werden.
Die vom Roboterhersteller oder von anderen Teilmaschinenherstellern mitgelieferten Benutzerinformationen werden vom Systemintegrator zur Erstellung der Betriebsanleitung verwendet oder werden direkt Bestandteil davon.
3.1.3 Technische Dokumentation für unvollständige Maschinen
Industrieroboter gelten, da sie meist ohne externe Schutzeinrichtungen geliefert werden, als unvollständige Maschine oder Teilmaschine.
In der Maschinenrichtlinie 98/37/EG , die bis Ende 2009 gültig war, wurde für solche unvollständigen Maschinen keine Dokumentation gefordert, die Pflicht zur Mitgabe einer Benutzerinformation ergab sich lediglich, wenn in der Herstellererklärung die Einhaltung von Normen bestätigt wurde, die eine solche forderten. Die seit 30.12.2009 anzuwendende Richtlinie 2006/42/EG hat diesen Mangel beseitigt und die Anforderungen für unvollständige Maschinen denen für vollständige angeglichen.
Das Verfahren für unvollständige Maschinen ist nahezu genauso umfangreich wie das Konformitätsbewertungsverfahren für Maschinen und fordert neben einer Risikobeurteilung vom Hersteller oder Inverkehrbringer eine Reihe von Dokumenten.
Den größten Teil bildet die Nachweisdokumentation, die die Maschinenrichtlinie als "Technische Unterlagen"
bezeichnet. Diese technischen Unterlagen müssen nicht an den Kunden weitergegeben werden. Sie verbleiben beim Hersteller, außer wenn die Lieferung dieser Unterlagen vertraglich vereinbart wurde.
3.1.4 Spezielle Technische Unterlagen für unvollständige Maschinen
Die Maschinenrichtlinie legt fest, welche Unterlagen für die Beurteilung der Übereinstimmung mit den angewandten grundlegenden Sicherheits- und Gesundheitsschutzanforderungen notwendig sind. Der Umfang erstreckt sich auf die Konstruktion, den Bau und die Funktionsweise der unvollständigen Maschine.
Eine Auflistung der erforderlichen Dokumente für die Nachweisdokumentation finden Sie im Anhang 3: Checkliste Technische Unterlagen (Nachweisdokumentation).
| Auszug aus der Richtlinie 2006/42/EG :
ANHANG VII Die speziellen technischen Unterlagen sind nach dem Tag der Herstellung der unvollständigen Maschine - bzw. bei Serienfertigung nach dem Tag der Fertigstellung der letzten Einheit - mindestens zehn Jahre lang bereit zu halten und den zuständigen Behörden der Mitgliedstaaten auf Verlangen vorzulegen. Sie müssen sich nicht unbedingt im Gebiet der Gemeinschaft befinden und auch nicht ständig körperlich vorhanden sein. Die in der Einbauerklärung benannte Person muss die Unterlagen jedoch zusammenstellen und der zuständigen Behörde vorlegen können. Werden die speziellen technischen Unterlagen den zuständigen einzelstaatlichen Behörden auf begründetes Verlangen nicht vorgelegt, so kann dies ein hinreichender Grund sein, um die Übereinstimmung der unvollständigen Maschine mit den angewandten und bescheinigten grundlegenden Sicherheits- und Gesundheitsschutzanforderungen anzuzweifeln. |
3.1.5 Montageanleitung
Der Hersteller oder Inverkehrbringer der unvollständigen Maschine ist verpflichtet, neben einer Einbauerklärung auch eine Montageanleitung mitzuliefern.
Die Montageanleitung verbleibt bei demjenigen, der die unvollständige Maschine in eine Maschine einbaut oder mit anderen Teilen zu einer Maschine zusammenbaut.
Sie wird Teil der technischen Unterlagen der Maschine.
| Auszug aus der Richtlinie 2006/42/EG :
ANHANG VI In der Montageanleitung für eine unvollständige Maschine ist anzugeben, welche Bedingungen erfüllt sein müssen, damit die unvollständige Maschine ordnungsgemäß und ohne Beeinträchtigung der Sicherheit und Gesundheit von Personen mit den anderen Teilen zur vollständigen Maschine zusammengebaut werden kann. Die Montageanleitung ist in einer Amtssprache der Europäischen Gemeinschaft abzufassen, die vom Hersteller der Maschine, in die die unvollständige Maschine eingebaut werden soll, oder von seinem Bevollmächtigten akzeptiert wird. Die Maschinenrichtlinie fordert für unvollständige Maschinen über die Montageanleitung hinaus keine weitere Benutzerinformation, Das heißt, die Verpflichtung eine Betriebsanleitung mitzuliefern, wie es bei kompletten Maschinen der Fall ist, gibt es für unvollständige Maschinen nicht. |
3.1.6 Benutzerinformation
Eine Verpflichtung für den Roboterhersteller, zusätzliche Informationen bereitzustellen, die über den Inhalt der Montageanleitung hinausgehen, ergibt sich durch die Anwendung der EN ISO 10218-1.
Eine Auflistung der Mindestangaben für diese "Benutzerinformation" finden Sie im Anhang 2: Checkliste Benutzerinformation. Die Benutzerinformation wird meist vom Systemintegrator zur Erstellung der Betriebsanleitung verwendet oder ist direkt Bestandteil davon.
3.1.7 Anhaltezeit und Anhalteweg
Die EN ISO 10218-1 fordert im Anhang B vom Roboterhersteller Angaben zu Anhaltezeit und Anhalteweg. Diese Informationen werden vor allem zur Berechnung des Sicherheitsabstands bei der Anwendung von Schutzeinrichtungen benötigt. Auch für die Festlegung des eingeschränkten Raums muss die tatsächliche Halteposition unter Berücksichtigung des Anhalteweges ermittelt werden.
Als Anhaltezeit wird die Gesamtzeit vom Einleiten eines Stopps bis zum Stillstand der Roboterachsen verstanden. Das Gleiche gilt im übertragenen Sinne auch für den Anhalteweg.
Die Anhaltezeit setzt sich zusammen aus der Reaktionszeit und der Bremszeit. Die Reaktionszeit ist abhängig von der Übertragungszeit, der Verarbeitungszeit innerhalb der Steuerung und den Schaltzeiten von Relais, Schützen und Bremslüftern. Sie ist annähernd konstant und hat nur eine geringe Toleranz. Der Bremsweg ist von den Faktoren Last, Geschwindigkeit und Auslenkung abhängig. Bei "Stoppkategorie 0" kommt auch noch die Temperatur der Bremsen und der Verschleiß und Verschmutzungsgrad der Bremsbeläge hinzu. Bei "Stoppkategorie 1" dient die Bremse nur als Haltebremse und hat deswegen keinen Einfluss auf die Bremszeit. Zur Erläuterung von Stoppkategorie 1 und Stoppkategorie 0 siehe auch Abschnitt 4.1.9.
Abb. 22 Anhaltezeit [G]

Die Angaben, die der Hersteller nach EN ISO 10218-1 in seiner Anwenderdokumentation machen muss, beschränken sich auf den Anhalteweg und die Anhaltezeit nach einem Stopp für die drei Achsen mit der größten Auslenkung. Der Weg kann dabei je nach Zweckmäßigkeit in Linear- oder Winkeleinheiten angegeben werden. Für Stoppkategorie 0 müssen diese Werte für maximale Last, maximale Geschwindigkeit und maximale Auslenkung angegeben werden. Verfügt ein Roboter über eine Stoppkategorie 1-Funktion, müssen dafür die Bremswege bei 100 %, 66 % und 33 % Last, Geschwindigkeit und Auslenkung angegeben werden.
Abb. 23 Beispiel für die Anhaltewege der drei Hauptachsen eines Knickarmroboters bei Maximallast und Maximalgeschwindigkeit [G]
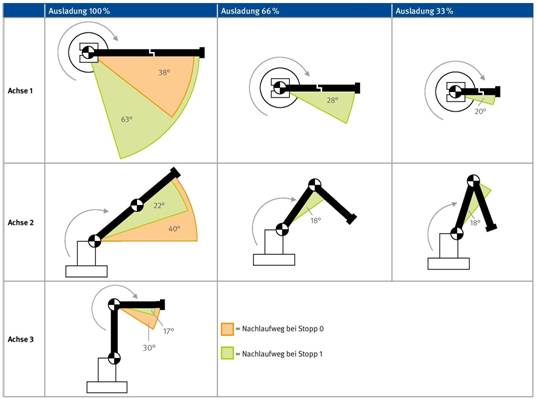
Abb. 24 Beispiel für die Angaben in der Benutzerinformation nach EN ISO 10218-1, Anhang B [G]

Die vom Hersteller in der Anwenderdokumentation zur Verfügung gestellten Werte können nur Richtwerte sein. Sie müssen unter realen Bedingungen validiert werden. Dafür hat der Hersteller Angaben dazu zu machen, wie der Integrator die Messung der Anhaltewege und -zeiten am realen Robotersystem durchführen kann.
Für die Messung der Anhaltewege und -zeiten werden die einzelnen Roboterhersteller unterschiedliche Methoden angeben. Das kann sein:
4 Schutzmaßnahmen für Industrieroboter und Anlagen
4.1 Rangfolge der Schutzmaßnahmen
Die Gesamtheit der Schutzmaßnahmen an einer Roboteranlage ist wie auch an anderen Anlagen oft eine Kombination von Maßnahmen, die vom Konstrukteur der Anlage in der Konstruktionsphase angewendet werden, z.B. Schutzeinrichtungen, und solchen, die vom Benutzer getroffen werden müssen, z.B. Verhaltensanforderungen, persönliche Schutzausrüstungen. Grundsätzlich haben aber die Maßnahmen, die bereits in der Konstruktion berücksichtigt werden können, Vorrang vor allen Maßnahmen, die vom Verwender zu treffen sind.
Erläuterungen zu einer systematischen Vorgehensweise bei der Festlegung von Schutzmaßnahmen durch den Konstrukteur beschreibt EN ISO 12100. Einer der wesentlichen Inhalte ist die Rangfolge der zu treffenden Maßnahmen (Abbildung 25). Die 3-Stufen-Methode beschreibt, dass die Gefährdungen zunächst konstruktiv zu beseitigen sind (unmittelbare Sicherheitstechnik). Ist dies nicht vollständig möglich, müssen Schutzeinrichtungen vorgesehen werden. Nur wenn sowohl konstruktiv als auch durch Schutzeinrichtungen keine vollständige Beseitigung der Gefährdungen möglich ist, dürfen hinweisende Maßnahmen angewendet werden.
Abb. 25 Drei-Stufen-Methode zur Festlegung von Schutzmaßnahmen

4.1.1 Betriebsarten für Roboter (ohne Peripherie)
Im allgemeinen lässt es sich nicht vermeiden, dass mit den Robotern Einrichtarbeiten nicht nur von außerhalb, sondern auch innerhalb des von Schutzeinrichtungen umgebenen Bereiches durchgeführt werden müssen. Deshalb sind bereits für jeden "nackten" Industrieroboter Betriebsarten zum Einrichten und Programmieren vorzusehen, die dann vom Anlagenbauer eingesetzt werden können.
Nach EN ISO 10218-1 müssen Industrieroboter über die in Tabelle 1 gezeigten Betriebsarten verfügen. Für die Betriebsarten T1 und T2 sowie für Sonderbetriebsarten muss geschultes Personal eingesetzt werden.
Zur Umschaltung der Betriebsarten muss ein abschließbarer Betriebsartenwahlschaltervorgesehen werden, der in jeder Position abziehbar ist (Abbildung 26). Alternative Wahlvorrichtungen, z.B. Zugangscodes, sind ebenfalls zulässig, wenn sie die gleiche Sicherheit bieten. Dabei ist auf die Steuerungssicherheit (Kategorie und PL) und die Möglichkeit des Umgehens von Schutzmaßnahmen (Vorhersehbare Fehlanwendung) zu achten.
In der Betriebsart T2 ist zur Anwahl der hohen Arbeitsgeschwindigkeit neben den in Tabelle 1 aufgeführten Maßnahmen ein zusätzlicher Tastendruck, z.B. auf dem Programmierhandgerät, erforderlich. Die Möglichkeit zur Nutzung der hohen Arbeitsgeschwindigkeit erlischt, sobald der Zustimmungsschalter über eine Zeitdauer von mehr als 5 Minuten unbetätigt bleibt. Will man danach zur hohen Arbeitsgeschwindigkeit zurückkehren, muss diese mittels Drehschalter oder Tastenwahl erneut vorgewählt werden. Die hier geforderte Zeitüberwachung von 5 min ist keine Sicherheitsfunktion.
Weiterhin gilt für die Betriebsart T2, dass bei paralleler Nutzung dieser Betriebsart an mehreren Robotern in einer Zelle die Überschneidung der Bewegungsräume ein hohes Risiko darstellt. Es muss für jeden Bediener ein sicherer Stand gewährleistet sein.
Die in Tabelle 1 angegebene reduzierte Geschwindigkeit beim Einrichten und Programmieren von 250 mm/s bezieht sich auf die Bewegung, gemessen an der Werkzeugaufnahme des Roboters. Die Gefahr besteht im Allgemeinen nur durch Anstoßen.
Tab. 1 Betriebsarten [F]
| Betriebsart | Schutzmaßnahme | |
| Manuell reduzierte Geschwindigkeit (T1)
z.B. zum Einrichten und Programmieren | Schutzeinrichtungen dürfen geöffnet bzw. unwirksam sein
|  |
| Manuell hohe Geschwindigkeit (T2)
z.B. zum Testen mit Arbeitsgeschwindigkeit | Schutzeinrichtungen dürfen geöffnet bzw. unwirksam sein
|  |
| Automatik | Schutzeinrichtungen müssen geschlossen bzw. wirksam sein
|  |
| *) Das Vorsehen einer sicher reduzierten Geschwindigkeit in der Betriebsart T1 sollte nach heutigem Stand der Technik wo immer möglich zum Einsatz kommen (Abschnitt 4.1.3). | ||
Abb. 26 Betriebsartenwahlschalter auf Maschinenbedienpult [H]

Bei Quetsch- oder Schergefahr, z.B. beim Positionieren einer Vorrichtung, sollte diese Geschwindigkeit entsprechend der Risikobeurteilung weiter reduziert werden.
Der Geschwindigkeitswert der reduzierten Geschwindigkeit (250 mm/s) sollte durch eine sichere Steuerung überwacht werden (siehe Abschnitt 4.1.3). Allerdings lässt EN ISO 10218-1 auch noch die Möglichkeit zu, dass die Geschwindigkeit nicht sicher überwacht wird und dass die Personensicherheit allein mittels des sicheren Zustimmungsschalters hergestellt wird. Ob von dieser Möglichkeit Gebrauch gemacht wird, muss die Risikobeurteilung ergeben, insbesondere im Zusammenhang mit den Anhaltewegen.
Im kollaborierenden Betrieb muss die reduzierte Geschwindigkeit immer sicher überwacht werden (Abschnitt 5).
4.1.2 Zustimmungseinrichtung
Eine Zustimmungseinrichtung (Zustimmungsschalter) ist ein zusätzliches handbetätigtes Befehlsgerät, das in Verbindung mit einer Startsteuerung verwendet wird und, falls es ständig betätigt wird, eine Maschinenfunktion erlaubt. Allein durch Betätigung der Zustimmungseinrichtung darf keine Bewegung gestartet werden. Die Zustimmungseinrichtung muss so ausgelegt sein, dass sie Maschinenbewegungen nur in einer bestimmten Stellung erlaubt. In älteren Anlagen findet man noch zweistufige Ausführungen von Zustimmungseinrichtungen (Tabelle 2).
Abb. 27 Betriebsartenwahlschalter auf Programmierhandgerät [A]

Für Industrieroboter, die nach Inkrafttreten von EN ISO 10218-1 (Feb. 2007) produziert wurden, dürfen nur noch dreistufige Zustimmungsschalter zum Einsatz kommen. Für den Maschinenaltbestand und für mögliche Nachrüstungen existieren keine europäischen Vorschriften. Möglicherweise existieren aber innerbetriebliche Vorgaben. Sie geben z.B. aufgrund des Unfallgeschehens oder der Durchgängigkeit der Ausrüstung eine bestimmte Ausführungsform vor. Wenn nichts Derartiges vorhanden ist, sollte die Entscheidung aufgrund des vorhandenen Risikos fallen. Dreistufige Zustimmungsschalter schalten auch beim "Verkrampfen" sicher ab. Zweistufige Zustimmungsschalter bieten u. U. ergonomische Vorteile bei lange andauerndem Betätigen, da kein Druckpunkt gehalten werden muss. Bei sehr engen Arbeitsräumen sollte die Wahl zugunsten der dreistufigen Ausführung ausfallen (Reaktionszeit, Verkrampfen).
Tab. 2 Ausführungsformen von Zustimmungseinrichtungen
| 2-stufig nur für Altbestand zulässig | 3-stufig für Neuanlagen und Altanlagen | |
| Stellung 1 Ruhestellung | Ausfunktion (Stellteil wird nicht betätigt) | Ausfunktion (Stellteil wird nicht betätigt) |
| Stellung 2 Freigabestellung | Zustimmungsfunktion (Stellteil wird betätigt) | Zustimmungsfunktion (Stellteil wird in seiner Mittelstellung betätigt) |
| Stellung 3 Panikstellung | - | Ausfunktion (Stellteil wird über seine Mittelstellung hinaus betätigt) |
Die in Tabelle 2 angegebenen Funktionen beziehen sich allein auf die Schalteinrichtung.
Die Weiterverarbeitung der Signale muss in sicherer Technik erfolgen, z.B. nicht über Standardbussysteme.
Wenn bei Betätigung der dreistufigen Ausführung von der dritten in die zweite Stellung zurückgeschaltet wird, darf die Zustimmungsfunktion kein Freigabesignal erzeugen.
Mit der Zustimmungseinrichtung allein dürfen keine Bewegungen eingeleitet werden.
Zusätzlich ist eine weitere Befehlseinrichtung, z.B. Tippschaltung, notwendig.
Die Signale dieser zusätzlichen Tippschaltung müssen nicht in sicherer Technik verarbeitet werden.
Das bedeutet auch, dass bereits beim Drücken des Zustimmungsschalters in Freigabestellung ein Anlaufen der Roboterbewegungen möglich sein kann, auch wenn die eigentliche Verfahrtaste noch nicht betätigt wurde.
Dies darf zwar bestimmungsgemäß nicht so vorgesehen werden, kann sich aber aufgrund der geringen Sicherheitsanforderungen für die Tippschaltung zum Beispiel durch einen mit der Zeit eingetretenen Steuerungsfehler ergeben.
In den Schulungen der Beschäftigten sollte deshalb darauf hingewiesen werden.
Wenn nicht durch die Risikobeurteilung festgelegt, müssen Zustimmungsschalter und Achsverfahrtaste nicht als Zweihandschaltung ausgelegt werden.
Es ist davon auszugehen, dass sich während des Einrichtens/Programmierens nur der Programmierer im Gefahrbereich aufhält. Dementsprechend sind die in Tabelle 1 angegebenen Schutzmaßnahmen als Schutz für den Programmierer zu betrachten. Müssen sich aus technologischen Gründen weitere Personen im Gefahrbereich aufhalten, sind zusätzliche Schutzmaßnahmen vorzusehen, z.B. zusätzliche Zustimmungsschalter.
Eine Schnittstelle zum Anschluss weiterer Zustimmungsschaltersollte vom Maschinenhersteller von vornherein vorgesehen werden, um auch spätere Erweiterungen zu ermöglichen.
Abb. 28 Betätigung des Zustimmungsschalters beim Programmieren [F]

4.1.3 Funktionale Sicherheit der Steuerung
Für sicherheitsbezogene Teile von Steuerungen wird in den Produktnormen für Industrieroboter EN ISO 10218-1 und EN ISO 10218-2 Einfehlersicherheit mit partieller Fehlererkennung gefordert. Gleichzeitig wird auch der Hinweis gegeben, dass diese Anforderungen durch Maßnahmen nach EN ISO 13849-1 oder EN 62061 erfüllt werden. Dabei wird folgende sicherheitsbezogene Leistungsfähigkeit der Steuerung genannt:
Diese Anforderungen bedingen in den meisten Fällen eine zweikanalige Steuerungsstruktur entsprechend Abbildung 29. Somit sind der freien Auswahl der Kategorie bzw. PL oder SIL mittels Risikograph (Abbildung 30) Grenzen gesetzt.
Im begründeten Einzelfall darf aufgrund einer umfassenden Risikobeurteilung für das Robotersystem und dessen Anwendung von diesen Vorgaben abgewichen werden. Bei der Auswahl einer alternativen Steuerungskategorie / PL / SIL können die Risikographen nach EN ISO 13849-1 zu Hilfe genommen werden (Abbildung 30).
Die sicherheitsbezogenen Teile von Steuerungen umfassen z.B.:
Beispiele zur Bestimmung des Performance Levels siehe Abschnitt 4.3
4.1.4 Sicher überwachte Robotersteuerung
Ein sicheres elektronisches Schutzsystem auf der Basis von Mikroprozessoren bietet gegenüber kontaktbehafteter elektromechanischer Technik eine Reihe von Vorteilen, z.B.:
Die für Produktionsaufgaben konzipierte elektronische Programmsteuerung (Anwenderprogramm) erfüllt jedoch in der Regel nicht die Sicherheitsanforderungen (siehe Abschnitt 4.1.3). Dazu ist ein unabhängiges übergeordnetes zweikanaliges Schutzsystem erforderlich. Der technische Aufwand dafür galt lange als nicht vertretbar. Neue leistungsfähige Mikroprozessoren ermöglichten aber auch die sichere Überwachung von Industrierobotern.
Abb. 29 Redundante Steuerungsstruktur mit kreuzweisem Datenvergleich nach Steuerungskategorie 3 [H]

Abb. 30 Risikograf nach EN ISO 13849-1 mit beispielhafter Auswahl des PLd. [8]

Legende
| S = | Schwere der Verletzung |
| S1 = | Leichte (üblicherweise reversible Verletzung) |
| S2 = | Ernste (üblicherweise irreversible Verletzung) |
| F = | Häufigkeit und/oder Dauer der Gefährdungsexposition |
| F1 = | Selten bis weniger häufig und/oder die Zeit der Gefährdungsexposition ist kurz |
| F2 = | Häufig bis dauernd und/oder die Zeit der Gefährdungsexposition ist lang |
| P = | Möglichkeit zur Vermeidung der Gefährdung oder Begrenzung des Schadens |
| P1 = | Möglich unter bestimmten Bedingungen |
| P2 = | Kaum möglich |
Abb. 31 Beziehung zw. Steuerungskategorie und Performance Level nach EN ISO 13849-1 [8]

Folgende Sicherheitsfunktionen sind heute bei den meisten Roboterherstellern verfügbar:
Für kollaborierende Roboter in der Funktion Power and Force Limiting ist zusätzlich eine sicher überwachte Kraftbegrenzung erforderlich.
4.1.5 Sicherheitshalt
Jeder Industrieroboter muss eine Möglichkeit für den Anschluss externer Schutzeinrichtungen haben, z.B. zum Anschluss von Lichtvorhängen und Schutztürschaltern. Dieses Interface wird als Sicherheitshalt-Eingang bezeichnet. Es muss zusätzlich zum Not-Halt-Eingang physikalisch vorhanden sein, z.B. durch zusätzliche Klemmen.
Die Stoppreaktion des Roboters bei einem Sicherheitshalt muss entsprechend EN 60204-1 in Stoppkategorie 0 oder 1 erfolgen [9]. Stoppkategorie 2 darf zusätzlich verwendet werden, wenn der Stillstand sicher überwacht wird.
4.1.6 Not-Halt
Industrieroboter müssen mit einer oder mehreren Not-Halt-Einrichtung(en) ausgerüstet sein. Gleichzeitig muss eine Möglichkeit für den Anschluss der externen Not-Halt-Einrichtungen vorgesehen sein, z.B. Klemme.
Die Bezeichnung "Not-Aus" wie z.B. in der früheren EN 775 darf für Neuanlagen nicht mehr verwendet werden. Not-Aus ist reserviert für elektrische (galvanische) Trennung von der Energieversorgung.
Die Ausführung der Not-Halt-Kreise muss in sicherer Technik entsprechend EN 60204-1 erfolgen. Die funktionale Sicherheit des Not-Halt-Kreises ist nach EN ISO 10218-1 in Einfehlersicherheit auszulegen (siehe Abschnitt 4.1.3). Not-Halt-Einrichtungen müssen gut sichtbar und leicht erreichbar sein. Sie müssen mindestens an jedem Bedienplatz vorgesehen werden.
Nach Entriegelung des Not-Halt-Befehlsgerätes darf die Anlage nicht unmittelbar wieder anlaufen. Erst nach Betätigung einer weiteren Starteinrichtung darf der Wiederanlauf erfolgen.
4.1.7 Anlagen-Not-Halt
Im Normalfall ist die Not-Halt-Schaltung so auszuführen, dass bei Betätigung des Not-Halts die gefährlichen Bewegungen und die gefährlichen Prozessfunktionen der gesamten Anlage stillgesetzt werden. Bei sehr weiträumigen Roboteranlagen ist es zulässig, die Not-Halt-Einrichtungen in bestimmte Teilbereiche aufzuteilen (siehe auch EN ISO 11161). Voraussetzung ist, dass diese aufgrund der konstruktiven Anordnung der Anlage als Teilbereiche erkennbar sind. Zusätzlich sind Hinweisschilder an den Not-Halt-Befehlsgeräten anzubringen. Das Personal muss durch entsprechende Schulungen mit der Wirkungsweise dieser Not-Halt-Einrichtungen vertraut sein.
Besonderes Augenmerk ist auf die Schnittstellen zu benachbarten Anlagenteilen zu richten. Gegebenenfalls müssen die Not-Halt-Kreise an den Schnittstellen auch auf benachbarte Anlagenteile wirken, wenn z.B. deren Weiterbetrieb eine Gefahr darstellt (z.B. Fördertechnik). Hierzu siehe auch Abschnitt 2.3.
4.1.8 Programmierhandgerät
Jedes Programmierhandgerät (PHG) muss mit einer Not-Halt-Einrichtung versehen sein. Die in der beweglichen Zuleitung des PHG untergebrachten sicherheitsrelevanten Leitungen, z.B. Not-Halt und Zustimmungseinrichtung, müssen gegen Kurz- und Querschluss geschützt sein, z.B. durch Redundanz und Überwachung.
Abb. 32 Not-Halt-Befehlsgerät an einer Roboteranlage [H]

Abb. 33 Programmierhandgerät (PHG) mit Not-Halt-Taster [H]

In der Praxis sieht man gelegentlich Programmierhandgeräte mit grauen Not-Halt-Stellteilen. Diese sind nach EN ISO10218-1 nicht zulässig. Not-Halt-Einrichtungen müssen auf gelbem Hintergrund rot gekennzeichnet sein. Auch über Funk betriebene Programmierhandgeräte müssen eine vollwertig wirksame Not-Halt-Einrichtung haben, die ebenfalls rot/gelb gekennzeichnet sein muss.
Steckbare PHGs müssen, wenn sie nicht angeschlossen sind, so aufbewahrt werden, dass eine irrtümliche Betätigung des darauf befindlichen, dann unwirksamen Not-Halt-Befehlsgerätes vermieden wird. Der Anlagenlieferant muss darauf in der Betriebsanleitung hinweisen. Entsprechend muss der Betreiber der Anlage die Beschäftigten unterweisen.
Bei verketteten Anlagen mit mehreren Robotern ist es u. U. erforderlich, das Programmierhandgerät während des laufenden Betriebes abzuziehen, weil es an einer anderen Station oder für einen anderen Roboter benötigt wird. Ohne zusätzliche schaltungstechnische Maßnahmen würde das Abziehen des Steckers zum sofortigen Stillstand der gesamten Anlage führen. Grund ist die als Ruhestromkreis ausgeführte Not-Halt-Einrichtung auf dem PHG. Eine Schaltung zum kurzzeitigen Überbrücken des betreffenden Not-Halt-Stromkreises ist dann erforderlich. In den einschlägigen Normen existieren keine Vorgaben darüber, wie eine solche Schaltung auszuführen ist. Jedoch sollte im Rahmen der Risikobeurteilung auch das Klemmen von Tastern, die zur Überbrückung verwendet werden, bedacht werden, ebenso wie das bewusste Festsetzen aus Bequemlichkeitsgründen.
Abb. 34 Beispiel für zeitweises Überbrücken des Not-Halt-Kreises während des Umsteckens des PHG [H]

Eine Überwachung des Zeitablaufs ist daher in jedem Fall sinnvoll. Abbildung 34 zeigt ein Schaltungsbeispiel mit Blindstecker (Kurzschlussstecker). Da die Zeitüberwachung keinen direkten Einfluss auf die Sicherheitsfunktion hat, kann ein rückfallverzögertes Relais oder ein elektronisches Betriebsmittel (z.B. SPS) verwendet werden. Potenzialtrennung ist zu beachten. Die Zeiteinstellung sollte dem Umsteckvorgang genügend Zeit einräumen (z.B. einige Minuten), so dass es nicht zu Fehlabschaltungen kommt.
4.1.9 Schnellstmögliches Stillsetzen
Die Maschinenrichtlinie und EN 60204-1 verlangen übereinstimmend für die Anwendung der Stoppfunktionen für Not-Halt ein schnellstmögliches Stillsetzen. Der Begriff "schnellstmöglich" ist jedoch dehnbar und verlangt zusätzliche Überlegungen.
Die Verknüpfung der Not-Halt- oder Schutztürsignale mit der sofortigen Energietrennung (Stoppkategorie 0) und dem gleichzeitigen Einfallen der mechanischen Haltebremsen kann einen schnellen Bremsvorgang bewirken, führt aber zum Verschleißen der Bremsen. Dies beeinträchtigt die Sicherheit der Anlage. Ein gesteuertes Stillsetzen, bei dem die Energie zu den Maschinenantriebselennenten beibehalten wird, um das Stillsetzen zu erzielen, schont die Maschine. Die Energie wird erst dann unterbrochen, wenn der Stillstand erreicht ist (Stoppkategorie 1). Jedoch ist die für das Bremsen erforderliche Antriebselektronik normalerweise sicherheitstechnisch nicht ertüchtigt. Der Fehlerfall, bei dem diese Elektronik im Moment des Not-Halts oder Öffnens der Schutztür versagt, ist zwar unwahrscheinlich, aber nicht auszuschließen. In der Folge könnte es zum unkontrollierten Austrudeln oder Weiterbeschleunigen der Antriebe kommen.
Tab. 3 Stoppfunktionen nach EN 60204-1
| Stoppfunktion | Beschreibung | Eignung für Sicherheitsfunktionen |
| Stoppkategorie 0 | Stillsetzen durch sofortiges Abschalten der Energie zu den Maschinen-Antriebselementen | ja |
| Stoppkategorie 1 | Gesteuertes Stillsetzen, wobei die Energie zu den Maschinen-Antriebselementen beibehalten wird, um das Stillsetzen zu erzielen. Die Energie wird erst dann unterbrochen, wenn der Stillstand erreicht ist. | ja |
| Stoppkategorie 2 | Gesteuertes Stillsetzen, wobei die Energie zu den Maschinen-Antriebselementen beibehalten wird | ja, jedoch mit zusätzlichen Maßnahmen |
Da die Antriebsregelelektronik auch während des normalen Betriebes zum Einsatz kommt, geht man davon aus, dass sich derartige Fehler schon während der Produktion durch Störungen bemerkbar machen.
Derzeit sind sichere Zeitüberwachungen der Bremsrampen noch ausreichend.
Neuere Steuerungen verfügen jedoch schon über sogenannte Brennsrampenüberwachungen, welche auch den Verlauf der Bremsrampe überwachen können.
Welche zeitliche Funktion für das elektronisch geregelte Stillsetzen gewählt wird, ist nach den geltenden Normen nicht vorgegeben. Ein Stillsetzen auf einer geometrischen Bahn ist ebenso zulässig wie ein Stillsetzen an der Stromgrenze. Die Entscheidung bleibt der Risikobetrachtung des Herstellers überlassen. Die Energietrennung nach der vorgesehenen Zeit muss sichergestellt sein. Dies verlangt sichere Zeitglieder.
Beim Zustimmungsschalter sollte Stoppkategorie 0 oder Stoppkategorie 1 mit überwachter Bremsrampe gewählt werden.
4.1.10 Achsbegrenzungen
Nach EN ISO 10218-1 muss mindestens die Grundachse, d. h. die Achse mit der größten Auslenkung, mit der Möglichkeit zur Anbringung mechanischer Festanschläge ausgestattet sein. Für die Achsen zwei und drei (die Achsen mit der zweit- und drittgrößten Auslenkung) muss die Möglichkeit vorgesehen werden, mechanische, elektromechanische oder elektronische Achsbegrenzungen vorzusehen.
Wo und mit welchem Radius personensichere Achsbegrenzungen vorzusehen sind, hängt von der Risikoanalyse der Anlage ab. Dabei ist der nach EN ISO 10218-1 definierte sogenannte eingeschränkte Raum festzulegen:
Maximaler Raum: Raum, der von beweglichen Teilen des Roboters erreicht werden kann, wie vom Hersteller definiert, und zusätzlich der Raum, der vom Endeffektor und dem Werkstück erreicht werden kann.Eingeschränkter Raum: Anteil des maximalen Raumes, der durch Begrenzungseinrichtungen eingeschränkt ist, die die unüberschreitbaren Grenzen darstellen.
Begrenzungseinrichtungen mittels Steuerungstechnik müssen in sicherer Technik ausgeführt sein (siehe Abschnitt 4.1.3).
Bei Neuanlagen kommen Achsbegrenzungen wie in Abbildung 35 gezeigt heute nur noch vereinzelt zum Einsatz. Meistens werden sicher überwachte Robotersteuerungen genutzt (siehe Abschnitt 4.2.1.3).
Abb. 35 Begrenzung von drei Bewegungsbereichen an der Grundachse durch sicher wirkende Initiatoren [H]

4.2 Schutzeinrichtungen für Roboterzellen und -anlagen
An Industrierobotern und -anlagen existiert eine Vielzahl von Gefahrstellen mit mechanischen Gefährdungen, z.B. durch Quetschen und Scheren. Um einen Eingriffs- und Zutrittsschutz sicherstellen zu können, müssen Roboteranlagen daher mit Schutzeinrichtungen umgeben sein. Eine Ausnahme bilden Arbeitsplätze mit kollaborierenden Robotern, die speziell für die Mensch-Roboter-Kooperation konzipiert sind (Abschnitt 5). In den meisten Fällen kommen Schutzzäune sowie feste Verkleidungen in Verbindung mit Lichtvorhängen, Rolltoren u. dgl. in Betracht.
Hinzu kommen Gefährdungen aufgrund des technischen Prozesses (Schweißen, Laser), welche zusätzliche Schutzeinrichtungen erfordern können, z.B. Blendschutz, Absaugung, persönliche Schutzausrüstung (PSA).
4.2.1 Trennende Schutzeinrichtungen
4.2.1.1 Sicherheitsabstände
In Bezug auf Sicherheitsabstände verweist EN ISO 10218-2 auf EN ISO 13857. Als Schutz gegen Überklettern beträgt die Mindesthöhe von trennenden Schutzeinrichtungen danach 1400 mm, wenn Gefahrstellen beim Übergreifen nicht erreicht werden können. Für Einlegeplätze kann aus ergonomischen Gründen eine geringere Höhe gewählt werden (siehe Abschnitt 4.2.1.4). Der Abstand der Unterkante der trennenden Schutzeinrichtungen zum Boden darf maximal 180 mm betragen (Unterkriechschutz).
Wenn Gefahrstellen beim Übergreifen erreichbar sind müssen die Sicherheitsabstände nach EN ISO 13857 bestimmt werden (Abbildung 36). Tabelle 4 zeigt die Sicherheitsabstände für die bei Robotern in der Regel anzunehmenden "hohen" Risiken, z.B. Quetschen, Scheren. Tabelle 5 für "geringe" Risiken kommt für Roboteranlagen nur selten in Betracht, z.B. bei Berühren oder Anstoßen.
Abb. 36 Sicherheitsabstände nach EN ISO 13857 [H]

Tab. 4 Sicherheitsabstände c hinsichtlich Übergreifen nach EN ISO 13857 für hohes Risiko [10]
| Höhe des Gefährdungs- bereiches a | Höhe der schützenden Konstruktion b | |||||||||
| 1000 | 1200 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2500 | 2700 | |
| 2700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2600 | 900 | 800 | 700 | 600 | 600 | 500 | 400 | 300 | 100 | 0 |
| 2400 | 1100 | 1000 | 900 | 800 | 700 | 600 | 400 | 300 | 100 | 0 |
| 2200 | 1300 | 1200 | 1000 | 900 | 800 | 600 | 400 | 300 | 0 | 0 |
| 2000 | 1400 | 1300 | 1100 | 900 | 800 | 600 | 400 | 0 | 0 | 0 |
| 1800 | 1500 | 1400 | 1100 | 900 | 800 | 600 | 0 | 0 | 0 | 0 |
| 1600 | 1500 | 1400 | 1100 | 900 | 800 | 500 | 0 | 0 | 0 | 0 |
| 1400 | 1500 | 1400 | 1100 | 900 | 800 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1500 | 1400 | 1100 | 900 | 700 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1500 | 1400 | 1000 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1500 | 1300 | 900 | 600 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1400 | 1300 | 800 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 1400 | 1200 | 400 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 1200 | 900 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1100 | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Tab. 5 Sicherheitsabstände c hinsichtlich Übergreifen nach EN ISO 13857 für niedriges Risiko [10]
| Höhe des Gefährdungs- bereiches a | Höhe der schützenden Konstruktion b | |||||||||
| 1000 | 1200 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2500 | 2700 | |
| 2500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2400 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 0 | 0 |
| 2200 | 600 | 600 | 500 | 500 | 400 | 350 | 250 | 0 | 0 | 0 |
| 2000 | 1100 | 900 | 700 | 600 | 500 | 350 | 0 | 0 | 0 | 0 |
| 1800 | 1100 | 1000 | 900 | 900 | 600 | 0 | 0 | 0 | 0 | 0 |
| 1600 | 1300 | 1000 | 900 | 900 | 500 | 0 | 0 | 0 | 0 | 0 |
| 1400 | 1300 | 1000 | 900 | 800 | 100 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1400 | 1000 | 900 | 500 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1000 | 1000 | 900 | 300 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1300 | 900 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1200 | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 1200 | 300 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 1100 | 200 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1100 | 200 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
4.2.1.2 Feststehende trennende Schutzeinrichtungen
Feststehende trennende Schutzeinrichtungen sind unlösbar mit der Maschine oder mit der Umgebung zu verbinden (Verschweißen, Vernieten etc.) oder sie dürfen nur durch die Benutzung von Werkzeug zu entfernen oder zu öffnen sein. Bei Anlagen, die erstmalig ab dem 29.12.2009 in Verkehr gebracht wurden, müssen zusätzlich sogenannte unlösbare Befestigungsmittel vorgesehen werden. Dabei müssen die Befestigungsmittel nach dem Abnehmen der Schutzeinrichtungen mit den Schutzeinrichtungen oder mit der Maschine verbunden bleiben. Dies gilt aber nur dann, wenn vorhersehbar ist, dass z.B. bestimmte Zaunfelder oder Abdeckungen für regelmäßige Reinigungs- oder Wartungsarbeiten entfernt werden müssen. Bei Anlagen mit einer ausreichenden Zahl von Zugangstüren kann davon ausgegangen werden, dass Reinigungspunkte durch die Schutztüren erreichbar sind.
Professionelle Anbieter von Maschinenschutzzäunen bieten meistens von vornherein Zaunsysteme an, die die o. g. Kriterien erfüllen (Abbildung 37).
Die Rückhaltefähigkeit von trennenden Schutzeinrichtungen gegen mechanische Einwirkungen ist nicht generell festgelegt. Wenn damit zu rechnen ist, dass herausgeschleuderte Teile, z.B. Bruchstücke von Bearbeitungswerkzeugen, die trennenden Schutzeinrichtungen durchschlagen oder unzulässig deformieren, müssen im Rahmen der Risikobeurteilung Vorkehrungen getroffen werden.
Für Dreh-, Fräs- und Bohrbearbeitungen enthalten die entsprechenden Europäischen Normen Tabellenwerte zur Auslegung von trennenden Schutzeinrichtungen für die Materialien Stahl und Polycarbonat. Die Dimensionierung der trennenden Schutzeinrichtungen gegen andere mechanische Einwirkungen ist entsprechend durch Berechnung oder Versuch auszulegen.
Abb. 37 Befestigungsmittel bleiben nach dem Abnehmen der Schutzeinrichtungen mit den Schutzeinrichtungen oder mit der Maschine verbunden (Beispiel). [H]

Trennende Schutzeinrichtungen sollten unabhängig von Zusatzanforderungen eine gewisse Grundstabilität aufweisen. Eine fallende oder sich abstützende Person sollte von der Schutzeinrichtung sicher gehalten werden.
4.2.1.3 Eingeschränkter Bewegungsraum
Ein eingeschränkter Raum (siehe auch Abschnitt 4.1.10) ist mindestens dort einzurichten, wo sich häufig Personen aufhalten. Dabei sind Personen auch außerhalb der Umzäunung durch zusätzliche Schutzmaßnahmen vor fehlerhaften Verfahrbewegungen des Roboters zu schützen. Diese Maßnahmen müssen entsprechend den örtlichen Gegebenheiten und dem zu mindernden Risiko ausgewählt werden. Geeignet sind:
Nach EN ISO 10218-2 dürfen die äußeren Schutzeinrichtungen nicht näher an der Gefährdung installiert werden als der eingeschränkte Raum, es sei denn, dass entweder die äußeren Schutzeinrichtungen als Begrenzungseinrichtung nach EN ISO 10218-2, 5.4.3 konstruiert sind oder die Risikobeurteilung ergibt, dass andere technische Schutzmaßnahmen geeignet sind.
Die folgende Unterscheidung in geringe und hohe Personenexposition gibt Hinweise zur Ausführung einer solchen Risikobeurteilung.
In Betrieben der Automobil- bzw. Automobilzulieferindustrie werden derzeit für eine hohe Personenexposition im Rahmen der Risikobeurteilung des Anlagenherstellers in Zusammenarbeit mit dem Betreiber als Richtwert mehr als 1-2 Stunden/Tag angegeben. Wenn diese Zeit unterschritten wird, kann von einer geringen Aufenthaltsdauer gesprochen werden.
Die sichere Einschränkung des Bewegungsraums wird bei Neuanlagen zunehmend mittels sicher überwachter Robotersteuerung realisiert (4.1.4). Im Rahmen der Risikobeurteilung sollte der Anlagenhersteller gemeinsam mit dem zukünftigen Betreiber ein Sicherheits-Anlagenlayout definieren. Darin sind die Bereiche zu kennzeichnen, welche mit sicher überwachter Robotersteuerung oder gleichwertigen Maßnahmen zu schützen sind (Abbildung 39).
Abb. 38 Beispiel für eine Auswahl der zu schützenden Bereiche [H]

Abb. 39 Beispiel für ein Sicherheits-Anlagenlayout [1]

Bei Nachrüstung von bestehenden Anlagen kommen i. d. R. kontaktbehaftete oder elektronische Achsnocken zur Anwendung. Mechanische Festanschläge sind zwar einfach zu montieren, schränken aber den Bewegungsbereich meist soweit ein, dass auch die Produktion der Anlage dadurch behindert wird.
Bei der Positionierung der Nocken und Schalteinrichtungen ist der Nachlauf des Roboters zu berücksichtigen, d. h. das Schaltsignal zum Stillsetzen der Achsen muss bereits vor Einfahren in den Gefahrbereich erfolgen. Geringe Verformungen der Schutzzäune im Fehlerfall können in Kauf genommen werden, vorausgesetzt, dass keine Teile oder Bruchstücke gefährlich wegfliegen können.
Kommt an der Anlage die Betriebsart "manuell hohe Geschwindigkeit" (T2) zum Einsatz, muss ein sicherer Standort mit einem Freiraum von mind. 500 mm zwischen dem berechneten Haltepunkt der Gefährdung und z.B. Gebäuden, Aufbauten, äußeren Schutzeinrichtungen, Versorgungseinrichtungen oder anderen Maschinen eingehalten werden. Wird dieser Sicherheitsabstand mittels steuerungstechnischer Maßnahmen realisiert, bilden diese Maßnahmen eine Sicherheitsfunktion nach EN ISO 13849-1 und müssen PLd Kategorie 3 erfüllen (Abschnitt 4.3). Der bei der Risikobewertung ermittelte Standort des Einrichters während der Betriebsart T2 muss in der Betriebsanleitung angegeben werden.
4.2.1.4 Stationen zum manuellen Be- und Entladen
Für Schutzeinrichtungen an Stationen zum manuellen Be- oder Entladen gelten zunächst die gleichen Anforderungen wie auch für sonstige Schutzeinrichtungen: Der Zugang zum Gefahrenbereich muss primär durch technische Maßnahmen gesichert sein. Ebenso dürfen die Bedienpersonen keinen Gefährdungen durch den Prozess ausgesetzt sein, z.B. durch herausfliegende Teile, Schweißfunken etc.
Bei manuellen Be- und Entladestationen mit wechselseitigem Zugriff durch Roboter und Bediener (z.B. Spannstationen) sind nach EN ISO 10218-2 keine weiteren Schutzeinrichtungen erforderlich, wenn die Barriere zwischen Mensch und Roboter mindestens 1400 mm hoch ist. Diese Barriere wirkt dabei nur als Schutz gegen Durchstieg in den Gefahrbereich der Anlage. Die vom Bediener unmittelbar erreichbaren gefahrbringenden Bewegungen an der Station (z.B. Spanner, Roboterarm, Werkzeug) müssen davon unabhängig immer abgesichert werden, z.B. durch Laserscanner (Abbildung 40).
Aus ergonomischen Gründen ist die o. g. Barrierehöhe von 1400 mm Höhe meistens nicht akzeptabel. In einer Anmerkung bietet EN ISO 10218-2 deshalb an, dass auch Höhen zwischen 1400 und 1000 mm vertretbar sind, je nach Schutzwirkung durch die Form der Barriere und die Ergebnisse der Risikobeurteilung.
Der für Industrieroboter zuständige Normenausschuss Maschinenbau (NAM) des DIN hat hierüber mehrmals beraten und ein Maß von mind.1000 mm als nach dem Stand der Technik für ausreichend befunden, vorausgesetzt, dass dies durch die Risikobewertung ermittelt wurde. Dies deckt sich mit den Anforderungen in EN ISO 11161.
Abb. 40 Manuelle Beladestation [B]

Bei Barrierehöhen von weniger als 1000 mm müssen weitere Schutzmaßnahmen vorgesehen werden. Geeignet sind z.B. optische Schutzeinrichtungen, die das Eindringen einer Person in den Gefahrbereich der Anlage erkennen und die gefahrbringenden Bewegungen stillsetzen.
Aufgrund der Form der Werkzeuge und Bauteile kommt es vor, dass die Barriere nicht durchgängig eine bestimmte Höhe hat. Die Barrierehöhe sollte dabei, wenn ergonomisch möglich, größer 1000 mm sein. Es können sich jedoch z.B. aufgrund der Teilegeometrie auch Aussparungen ergeben, die 1000 mm unterschreiten. Anhand der Risikobeurteilung ist zu bewerten, ob dadurch ein erhöhtes Risiko entsteht. Insbesondere ist zu prüfen, ob diese aufgrund der Größe und Geometrie als Aufstieg benutzt werden können.
Neben dem Vorsehen der o. g. technischen Schutzmaßnahmen gelten die Anforderungen an die Betriebsanleitung des Herstellers sowie die daraus abzuleitenden Unterweisungen durch den Betreiber der Anlage.
4.2.2 Bewegliche trennende Schutzeinrichtungen
Bewegliche trennende Schutzeinrichtungen müssen mit den gefahrbringenden Bewegungen verriegelt sein. Das heißt, die gefahrbringenden Bewegungen müssen angehalten werden, sobald eine Schutzeinrichtung geöffnet wird. Die gefahrbringenden Bewegungen müssen zum Stillstand kommen, bevor sie von Personen erreicht werden können. Dabei wird entsprechend EN ISO 13855 eine Schreit-/Greifgeschwindigkeit von 1,6 m/s zugrunde gelegt.
Die Steuerungen von Verriegelungen müssen in sicherer Technik ausgeführt sein (Abschnitt 4.1.3).
4.2.2.1 Schutztüren
Schutztüren müssen dort vorgesehen werden, wo der Zugang von Personen zur Anlage erforderlich ist. Bei größeren Anlagen sind in der Regel mehrere Schutztüren vorzusehen, um das Risiko des Umgehens von Schutzeinrichtungen zu minimieren.
Wenn das Risiko besteht, dass Personen in der Anlage eingeschlossen werden und sich nicht selbst befreien können, müssen Schutztüren von innen zu öffnen sein (Fluchtentriegelung, Abbildung 41).
Türzuhaltungen müssen vorgesehen werden, wenn Gefahrstellen erreicht werden können, bevor die gefährlichen Maschinenfunktionen zum Stillstand gekommen sind. Türzuhaltungen dürfen von der Maschinensteuerung erst dann zum Öffnen freigegeben werden, wenn die Gefahrstellen unter Berücksichtigung der Zutrittsgeschwindigkeit nicht mehr erreicht werden können. Die Freigabe darf zeitgesteuert oder in Abhängigkeit von einem Prozesssignal erfolgen, z.B. Drehzahl-Null-Signal. In der Regel wird über die Türzuhaltungen auch ein Schutz des Produktionsprozesses erzielt. Dabei erfolgt die Freigabe erst dann, wenn der Prozessablauf dies zulässt.
Türzuhaltungen sind nicht verpflichtend. Die Notwendigkeit ergibt sich aus o. g. Überlegungen.
Bei elektromagnetischen Türzuhaltungen existieren zwei unterschiedliche Systeme (Typen):
Eine Auswahl der o.g. Typen von Türzuhaltungen erfolgt entsprechend der Risikobeurteilung des Maschinenherstellers. Eine generelle Bevorzugung eines bestimmten Typs existiert nicht. Das elektrische Signal, welches die Zuhaltung aktiviert bzw. deaktiviert, ist in der Regel nicht sicherheitsgerichtet, da die Überwachungskontakte der Schutztür auch bei fehlerhaftem Zuhaltesignal wirksam sind.
Abb. 41 Fluchtentriegelung [H]

4.2.2.2 Rolltore
Rolltore haben gegenüber berührungslos wirkenden Schutzeinrichtungen den Vorteil, dass sie sich in nur geringem Abstand zu den Gefahrstellen befinden müssen, da ein Sicherheitsabstand wie bei Lichtschranken aufgrund der Hand-Arm-Geschwindigkeit nicht beachtet werden muss. Dies kann bei Einlegeplätzen und Spannstationen von Vorteil sein, da lange Wegstrecken für die Beschäftigten vermieden werden. Rolltore müssen eine ausreichende Stabilität haben, um Kräfte durch Fallen oder Abstützen der Bedienperson aufnehmen zu können. Sofern der Bewegungsbereich des Roboters in das Rolltor reicht, ist der Roboter gegen Verfahren in diesen Bereich gesondert abzusichern, wenn mit einem häufigen Aufenthalt der Bedienperson am Rolltor zu rechnen ist (siehe auch Abschnitt 4.2.1.3). Wenn das nicht möglich ist, muss der Abstand ausreichend gestaltet werden.
Zu beachten ist bei Rolltoren die Absicherung der Schließkanten. Entsprechend EN 12453 dürfen die statischen Kräfte, die beim Einklemmen von Armen und Händen zwischen Schließkante und Gegenschließkante auftreten, nicht größer sein als 150 N. Kurzzeitig (max. 0,75 s) dürfen bis zu 400 N auftreten. Treten größere Kräfte auf, müssen Schaltleisten verwendet werden, die bei Auftreffen auf ein Hindernis die Bewegung des Rolltores sicher unterbrechen. Aber auch bei Verwendung von Schaltleisten dürfen die genannten Maximalkräfte an den Schließkanten nicht überschritten werden. Außerdem wird eine großflächige Kontaktierung vorausgesetzt, d. h. keine scharfen Kanten.
Da als Material für Rolltore oft Kunststoff verwendet wird, ist die Widerstandsfähigkeit gegenüber prozessbedingten Beanspruchungen, z.B. beim Schweißen, sicherzustellen.
Abb. 42 Berührungslos wirkende Schutzeinrichtung mit Mutingfunktion - Detektion einer eintretenden Person [K]

4.2.2.3 Umgehen auf einfache Weise (Manipulation)
Die Schutzeinrichtungen und die Verriegelungen müssen so gestaltet sein, dass sie nicht auf einfache Weise manipuliert, also umgangen werden können. Das Umgehen auf einfache Weise muss bereits durch die Konstruktion der Maschine verhindert sein. Nach
EN ISO 14119 kann ein typisches "Umgehen auf eine vernünftigerweise vorhersehbare Art" ein absichtlicher Versuch sein, eine Verriegelungseinrichtung entweder von Hand oder durch Benutzung eines leicht verfügbaren Gegenstandes zu umgehen.
Wenn im Rahmen der Risikobeurteilung bereits bei der Konstruktion der Maschine eine Motivation zum Umgehen von Schutzeinrichtungen erkennbar wird, z.B. durch unzureichende Bedienbarkeit, muss nach EN ISO 14119 der Schutz gegen Umgehen erhöht werden. Die Verwendung eines separaten Betätigungsorgans (Zunge) durch den Benutzer muss dann z.B. durch einen verdeckten Einbau erschwert werden.
Abb. 43 Berührungslos wirkende Schutzeinrichtung mit Mutingfunktion - Passieren des Förderguts [K]

Abb. 44 Quittiertaster [H]

Es ist aber sinnvoller, die Bedienbarkeit der Maschine von vornherein so zu gestalten, dass ein Anlass zum Umgehen von Schutzeinrichtungen vermieden wird.
4.2.3 Berührungslos wirkende Schutzeinrichtungen (BWS)
Zu den berührungslos wirkenden Schutzeinrichtungen zählen Lichtschranken und -vorhänge, Laserscanner, Kamerasysteme, Passiv-Infrarotsysteme, Ultraschallsysteme usw. Im Roboterbereich kommen hauptsächlich Lichtgitter und Lichtvorhänge sowie Laserscanner zur Anwendung. Nach EN ISO 10218-2 müssen die Sicherheitsabstände für berührungslos wirkende Schutzeinrichtungen entsprechend EN ISO 13855 ausgelegt werden.
Aufgrund des nicht zu vermeidenden Nachlaufens der Roboterachsen oder der Vorrichtungen beim Eintreten in den Gefahrenbereich ist entsprechend EN ISO 13855 ein Sicherheitsabstand vorzusehen. Bei einem senkrecht angeordneten Lichtvorhang bestimmt das Detektionsvermögen (Auflösung bzw. Abstand der Lichtstrahlen untereinander) den notwendigen Sicherheitsabstand zur Gefahrstelle. Aufgrund des Nachlaufens der gefahrbringenden Bewegungen muss bei einem Lichtvorhang mit geringer Auflösung der Abstand des Lichtvorhanges zur Gefahrstelle größer sein als bei einem Lichtvorhang mit hoher Auflösung. Der Nachlauf kann durch Rechnung oder Versuch ermittelt werden.
Abb. 45 Sichtfenster an einer Laserschweißanlage [H]

4.2.4 Hintertretbare Schutzeinrichtungen, Quittierung
Roboteranlagen sind meistens begehbar. Es müssen Maßnahmen vorgesehen werden, die einen Anlauf von gefährlichen Bewegungen verhindern, solange sich Personen im Gefahrenraum aufhalten. Dies gilt für Zugänge durch berührungslos wirkende Schutzeinrichtungen (z.B. Lichtvorhänge) und bewegliche trennende Schutzeinrichtungen (z.B. Schutztüren) gleichermaßen. Es können zwei Fälle unterschieden werden:
Gefahrenraum einsehbar:
Wenn die Bedienperson den Arbeitsraum einsehen kann, ist ein Quittiertaster ausreichend, um die Signale von Schutzeinrichtungen wie Schutztüren und Lichtvorhängen zurückzusetzen und den Start der gefährlichen Bewegungen freizugeben (Abbildung 44). Für Quittiertaster gilt allgemein:
Abb. 46 Lock-Out [H]

Wenn Hindernisse den Blickversperren sind ggf. mehrere nacheinander zu betätigende Quittiertaster erforderlich oder es müssen Sichtfenster vorgesehen werden, um die Einsehbarkeit des Gefahrenraumes bei Quittierung zu ermöglichen, z.B. bei Roboter-Schweißanlagen (Abbildung 45).
Gefahrenraum nicht einsehbar:
Für diesen Fall ist die Anwendung von Quittiertastern als alleinige Maßnahme nicht ausreichend, da sich Personen im Arbeitsraum aufhalten können. Sie werden vom Betätigungsort aus möglicherweise nicht gesehen, da sie verdeckt sind, z.B. durch Vorrichtungen. In diesen Bereichen kann durch den Einbau konstruktiver Elemente der Aufenthalt von Personen verhindert werden, z.B. durch schräg gestellte Bleche (Stehverhinderung). Außerdem kann durch Spiegel die Einsehbarkeit verbessert werden. Des Weiteren können partiell personenerkennende Schutzeinrichtungen vorgesehen werden, z.B. liegende Lichtvorhänge, Scanner, Schaltmatten, Schaltplatten.
Bei größeren weiträumigen Anlagen ist aufgrund der konstruktiven Hindernisse eine vollständige Erkennung durch derartige Einrichtungen technisch und wirtschaftlich nicht mehr durchführbar, z.B. im Automobilkarosseriebau. Dann sind mindestens an den einzelnen Zugangstüren, von denen aus ein größtmöglicher Einblick in die Anlage gegeben ist, Quittiertaster anzubringen. Zusätzlich müssen nach EN ISO 10218-2 weitere Schutzmaßnahmen vorgesehen werden, z.B. Anlaufwarnungen und sogenanntes Lock-Out. Akustische und optische Anlaufwarnungen sind jedoch nicht zu empfehlen, da sie von den Beschäftigten als störend empfunden werden. Früher oder später werden sie dann nicht mehr wahrgenommen, demontiert oder unwirksam gemacht. Im Automobilbau hat sich das sogenannte Lock-Out bewährt. Dabei werden an den Zugängen Sicherheitstürschaltervorgesehen, welche die Möglichkeit zum Einhängen von Schlössern (Lock Out) oder gleichwertigen personengebundenen Sicherungseinrichtungen bieten (Abbildung 46).
4.2.5 Nicht hintertretbare Schutzeinrichtungen
Wenn der Arbeitsraum hinreichend klein ist, sodass ein unbemerkter Aufenthalt von Personen darin ausgeschlossen werden kann, darf auf Quittiereinrichtungen verzichtet werden (siehe auch EN 692). Der jeweils folgende Arbeitszyklus kann dann unmittelbar nach Schließen der Schutztürkontakte oder Freiwerden der BWS eingeleitet werden. Die Größe des Gefahren- bzw. Arbeitsraums sollte die Maße wie bei Pressen nicht überschreiten:
Eventuelle Lücken zwischen BWS und Gefahrenraum (z.B. Tisch) dürfen nicht breiter als 75 mm sein, damit sich keine Person in diesem Zwischenraum aufhalten kann. Wenn der Gefahrenraum die o. g. Maße überschreitet, kann auf eine Quittiereinrichtung nicht verzichtet werden, außer wenn der Arbeitsraum z.B. durch Laserscanner vollständig überwacht wird.
4.2.6 Zweihandschaltungen
Spannvorgänge müssen im Allgemeinen bei geöffneter Schutzeinrichtung ausgelöst werden, da der einwandfreie Sitz des zu spannenden Teils in der Vorrichtung durch den Bediener kontrolliert werden muss. Da alle gefahrbringenden Bewegungen durch die elektrische Verriegelung der Schutzeinrichtung sicher abgeschaltet sein müssen, ist eine zusätzliche Schalteinrichtung erforderlich, die die Spannbefehle wirksam werden lässt.
Wenn die Spannhübe größer als 4 mm und aufgrund der Spannkräfte Verletzungen zu erwarten sind, müssen Maßnahmen für den Hand- bzw. Fingerschutz vorgesehen werden, z.B. Zweihandschaltungen. Entsprechend der Risikobeurteilung des Herstellers können Zweihandschaltungen vom Typ I, II oder III nach EN 547 (zukünftig EN ISO 13851) eingesetzt werden. Zweihandschaltungen vom Typ III bieten die höchste Sicherheit. Zu beachten ist, dass die Schaltbefehle der Zweihandschaltung sicher in der Steuerung der Anlage verarbeitet werden. Die Verarbeitung der Signale allein über die Funktions-SPS oder über Standardbussysteme ist nicht ausreichend.
Für den Abstand der Zweihandschaltung vom Gefahrbereich ist der Nachlauf der gefahrbringenden Bewegung maßgebend. Nach EN ISO 13855 ist von einer Greifgeschwindigkeit von 2 m/s auszugehen.
4.2.7 Ersatzmaßnahmen bei defekten Schutzeinrichtungen
Wie Produktionseinrichtungen an Maschinen unterliegen auch Schutzeinrichtungen normalem Verschleiß. Je nach Umgebungseinflüssen muss auch mit dem Ausfall von Schutzeinrichtungen gerechnet werden. Die Anforderungen insbesondere an die sicherheitsrelevante Steuerungstechnik von Roboteranlagen bedingen
in den allermeisten Fällen einen "Ausfall zur sicheren Seite". Bei Ausfall von elektronischen oder elektromechanischen Komponenten des Schutzsystems führt dies nicht zu einer gefährlichen Situation, sondern zum Maschinenstillstand.
Der zukünftige Betreiber der Anlage sollte sich rechtzeitig mit dem Lieferanten über mögliche Lösungen abstimmen. Wenn der Ausfall von Schutzeinrichtungen - und somit ein Maschinenstillstand - aus wirtschaftlichen Erwägungen nicht zu verkraften ist, müssen bereits bei der Konstruktion Vorsorgemaßnahmen getroffen werden. In der betrieblichen Praxis haben sich je nach Gefährdung und Dringlichkeit der Instandsetzungsmaßnahme folgende Vorgehensweisen bewährt:
Keinesfalls dürfen Schutzeinrichtungen ohne Ersatzmaßnahmen außer Kraft gesetzt werden!
4.3 Berechnungsbeispiel des Performance Levels für die Sicherheitsfunktionen einer Roboterzelle
4.3.1 Berechnung des Performance Levels für die Sicherheitsfunktionen bei Neuanlagen
Betrachtet wird eine Roboterzelle mit einer Einlegestation und einer Wartungstür. Die Einlegestation ist mit einer Trittmatte und einer Arbeitsbereichsüberwachung abgesichert. Der Zugang zum Arbeitsraum erfolgt über eine Wartungstür, welche mit einem Türsicherheitsschalter ausgerüstet ist.
Die externen Signale werden zur Verknüpfung mit anderen Maschinen oder Maschinenteilen, die hier nicht betrachtet werden, über eine Sicherheits-SPS geführt. Die funktionsmäßige logische Verknüpfung der Wartungstürfunktion mit der Betriebsart Automatik ist bereits in der Robotersteuerung realisiert.
Alle Achsen des Roboters werden gemeinsam durch Unterbrechung der Spannungsversorgung des Zwischenkreises stillgesetzt.
Die Bewertung wird in 4 Schritten durchgeführt:
Abb. 47 Beispiel Roboterzelle mit Einlegestation, Not-Halt und Wartungstür [G]

Abb. 48 Festlegen der Sicherheitsfunktionen [G]
Schritt 1: Sicherheitsfunktionen festlegen

Schritt 2: Feststellen des normativ geforderten Performance Levels für die jeweilige Sicherheitsfunktion
Die EN ISO 10218-1 stellt, als C-Norm für Industrieroboter, Anforderungen an die Leistungsfähigkeit sicherheitsgerichteter Steuerungssysteme und legt deren Niveau fest:
Diese Anforderung wird als gleichbedeutend mit Performance Level d mit Kategorie 3 nach EN ISO 13849-1 und Sicherheits-Integritätslevel 2 (SIL 2) mit Hardwarefehlertoleranz 1 (HFT1) nach EN 62061 betrachtet. Performance Level bezeichnet die sicherheitstechnische Leistungsfähigkeit einer Sicherheitsfunktion (siehe auch Abschnitt 4.1.3). Die 5 Stufen a bis e sind festgelegt mit definierten Bereichen der Wahrscheinlichkeit eines gefährlichen Ausfalls je Stunde (PFHd).
Tab. 6 Performance Level nach EN ISO 13849-1
| Performance Level (PL) | Durchschnittliche Wahrscheinlichkeit eines gefährlichen Ausfalls je Stunde 1/h (PFHD) |
| a | > 10-5 bis < 10-4 |
| b | > 3 * 10-6 bis < 10-5 |
| c | > 10-6 bis < 3 * 10-6 |
| d | > 10-7 bis < 10-6 |
| e | > 10-8 bis < 10-7 |
In Nordamerika sind für die Sicherheitsfunktionen 4 Anforderungsklassen bekannt:
Die in EN ISO 10218-1 festgelegten Anforderungen entsprechen dort der höchsten Klasse - control reliable.
EN ISO 10218-1 lässt zu, dass abweichend von diesen festgelegten Leistungsanforderungen ein anderes Niveau als Ergebnis einer umfassenden Risikoanalyse zulässig sein kann.
Schritt 3: Ermitteln der beteiligten Sicherheitskomponenten
Beteiligte Sicherheitskomponenten an der Sicherheitsfunktion 1 (Not-Halt)
| Not-Halt-Taster Kontakte 2-kanalig | Fehlerausschluss | 6500 Schaltzyklen |
| Sicherheits-SPS (Herstellerangabe) | SIL3, HFT1 | PFHD = 1 x 10-8 |
| Roboterfunktion Not-Halt (Herstellerangabe) | PLd, Kategorie 3 | PFHD = 1 x 10-7 |
Da die Mechanik des Not-Halt-Tasters nur einkanalig ist, ist ein Einsatz in einer Kategorie-3-Steuerung nur möglich, wenn ein Fehlerausschluss angenommen werden kann.
Nach EN ISO 13849-1 Tabelle C.1 beträgt die für einen Not-Halt-Taster mindestens erforderliche mechanische Lebensdauer 6500 Schaltzyklen.
Unter diesen Bedingungen kann für die mechanische Zwangsführung ein Fehlerausschluss angenommen werden.
Bei einer nach EN ISO 13849-1 ebenfalls anzunehmenden Lebensdauer von mindestens 20 Jahren ergibt sich mit 325 Schaltzyklen eine ungefähr einmal tägliche Betätigung. Wenn dies etwa der Praxis der geplanten Anlage entspricht, ist der Fehlerausschluss zulässig. Da die elektrischen Kontakte von Not-Halt-Tastern zwangsgeführt sind, ist der Fehlerausschluss sowohl für den mechanischen Stößel als auch für die elektrischen Kontakte zulässig.

Beteiligte Sicherheitskomponenten an der Sicherheitsfunktion 2 (Wartungstür)
| Türverriegelungsschalter | Fehlerausschluss für den Betätiger, 2-kanalige Kontakte | PFHD =1,01 * 10-7 |
| Sicherheits-SPS (Herstellerangabe) | SIL3, HFT1 | PFHD =1 * 10-8 |
| Roboterfunktion Sicherheitshalt (Herstellerangabe) | PLd, Kategorie 3 | PFHD =1 * 10-7 |
Zum Einsatz kommt ein Türverriegelungsschalter Bauart 2 mit getrenntem Betätiger (Zunge). Da die Zunge nur einmal vorhanden ist, muss wieder geprüft werden, ob ein Fehlerausschluss hinsichtlich Bruchs zulässig ist. Dieser Fehlerausschluss ist bei normaler Industrieumgebung für die meisten Schalter der Bauart 2 zulässig.
Kein Fehlerausschluss ist zum Beispiel bei extremen Umgebungseinflüssen möglich, z.B. Eindringen von Klebstoffen, wodurch die Zunge im gesteckten Zustand abreißen kann.
Der Wert für die Lebensdauer des Türverriegelungsschalters wird vom Hersteller in B10d angegeben. B10d steht für die mittlere Anzahl von Schaltzyklen, bis zu welcher 10 % der Bauteile gefahrbringend ausfallen können.
Um aus diesem B10d-Wert einen MTTFd- und später einen PFHd-Wert zu erhalten, wird noch die mittlere Anzahl der Schaltspiele pro Jahr (nop) benötigt.
Diese errechnet sich bei einer 6-Tage Woche und 2-Schicht-Betrieb wie folgt:
| B10d | nach Herstellerangabe | = 3 x 106 |
| dop | die mittlere Betriebszeit in Tagen pro Jahr | = 300 |
| hop | die mittlere Betriebszeit in Stunden pro Tag | = 16 |
| tZyklus | die mittlere Zeit zwischen zwei aufeinanderfolgenden Zyklen | = 3600 sec (Zugang 1 x pro Stunde) |


Der PFHd-Wert kann unter den folgenden Voraussetzungen aus EN ISO 13849-1 Tabelle K.1 abgelesen werden:
Damit beträgt die durchschnittliche Wahrscheinlichkeit eines gefährlichen Ausfalls pro Stunde
Beteiligte Sicherheitskomponenten an der Sicherheitsfunktion 3 (Trittmatte)
| Sicherheitsschaltmatte (Herstellerangabe) | PLd, Kategorie 3 | PFHD = 3,25 x 10-8 |
| Sicherheits-SPS (Herstellerangabe) | SI L 3, Hfl -1 | PFHD =1 x 10-8 |
| Roboterfunktion Arbeitsbereichsüberwachung (Herstellerangabe) | PLd, Kategorie 3 | PFHD = 1 x 10-7 |
Schritt 4: Berechnung des erreichten Performance Levels
Berechnung der Sicherheitsfunktion 1 (Not-Halt)

Berechnung der Sicherheitsfunktion 2 (Wartungstür)

Berechnung der Sicherheitsfunktion 3 (Trittmatte)

Abb. 49 Anlagenschema mit Neu- und Gebrauchtrobotern [G]
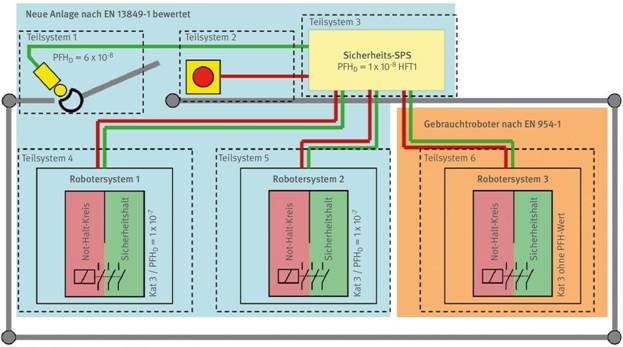
4.3.2 Berechnung des Performance Levels für die Sicherheitsfunktionen bei Wiederverwendung von gebrauchten Robotern in neuen Anlagen
Sollte eine Beschaffung von Daten für die Ermittlung des Performance Levels für Sicherheitsfunktionen von gebrauchten Industrierobotern nicht möglich sein, können die Teilfunktionen, die nicht nach der EN ISO 13849-1 bewertet werden, nur mit ihrer Kategorie angegeben werden (siehe auch [19]). In diesem Beispiel soll eine Roboterzelle mit zwei neuen und einem gebrauchten Industrieroboter betrachtet werden. Zur Bewertung werden die Teilsysteme "Neu" und "Alt" getrennt und die Sicherheitsfunktionen einzeln betrachtet (Abbildung 49).
Bewertung der Sicherheitsfunktion Wartungstür
a. Für den neuen Anlagenteil

b. Für den Anlagenteil mit Gebrauchtroboter

Bewertung der Sicherheitsfunktion Not-Halt
c. Für den neuen Anlagenteil

d. Für den Anlagenteil mit Gebrauchtroboter

5 Kollaborierende Robotersysteme
Traditionelle Industrieroboteranlagen können nur das automatisieren, was vollständig ohne menschliches Zutun auskommt. Insbesondere Montageaufgaben lassen sich bisher oft nicht automatisieren, weil einzelne Tätigkeiten nicht ohne die motorischen Fähigkeiten des Menschen auskommen. Der Mensch kann ohne Messwertgeber und Sensoren arbeiten. Auch die Montage elastischer Teile ist für ihn kein Problem. Ziel der kollaborierenden Roboter ist, diese Fähigkeiten zu kombinieren: den Menschen mit seinen Fähigkeiten für das Unpräzise und den Roboter mit seinen Vorzügen in Kraft, Ausdauer und Geschwindigkeit. Arbeitsplätze mit kollaborierenden Robotern sollen ganz oder teilweise ohne Schutzzäune auskommen.
Nach Definition aus EN ISO 10218-1 ist der kollaborierende Betrieb ein Zustand, in dem hierfür konstruierte Roboter innerhalb eines festgelegten Arbeitsraums direkt mit dem Menschen zusammen arbeiten, d.h. sich einen Arbeitsraum teilen. Kollaborierende Roboter werden oft auch als assistierende Roboter bezeichnet.
Service-Roboter oder Roboter im Rehabilitationsbereich (Medizinische Roboter) werden hier nicht behandelt.
Betrachtet werden hier nur kollaborierende Industrieroboter nach EN ISO 10218-1 und EN ISO 10218-2. Die sicherheitstechnischen Anforderungen sind sehr von der Applikation abhängig und über beide Normenteile verteilt. Im Folgenden werden die Anforderungen hinsichtlich der in der Praxis bevorzugten Anwendungsfälle dargestellt.
Kollaborierender Betrieb ist nicht zu verwechseln mit Einrichten/Teachen. Der kollaborierende Betrieb kommt in der Produktion zum Einsatz, d.h. er ist in der Regel ein Sonderfall des Automatikbetriebes.
5.1 Allgemeine Mindestanforderungen
In EN ISO 10218-1 werden Anforderungen für einen kollaborierenden Betrieb aufgestellt. Da diese Norm für den "nackten" Roboter ohne Peripherie gilt, wird oft interpretiert, dass allein mit diesen Anforderungen ein sicherer Roboter konstruiert und zertifiziert werden kann. Dies trifft nicht zu, da auch ein kollaborierender Roboter mit den für die Arbeitsaufgabe notwendigen Greifern und Vorrichtungen eine Maschine nach Maschinenrichtlinie bildet. Der Systemintegrator muss wie für jede andere Roboterapplikation eine EG-Konformitätserklärung ausstellen und ein CE-Zeichen an der Applikation anbringen.
Auch bei Zertifizierungen von kollaborierenden Robotern sollte(n) zwecks seriöser Beurteilung eine oder mehrere Beispielapplikationen einbezogen werden.
Die Anforderungen von EN ISO 10218-1 und EN ISO 10218-2 gelten auch für kollaborierende Robotersysteme.
Die Zusatzanforderungen für kollaborierende Roboter waren zur Zeit der Drucklegung dieser DGUV Information noch sehr rudimentär. Eine allgemein geltende Anforderung ist eine optische Anzeige für Roboter, die von einem nicht kollaborierenden (konventionellen) in einen kollaborierenden Betrieb wechseln können. Vorgaben über die Qualität dieser Anzeige existieren nicht. Eine Anzeige auf dem Bedienfeld kann daher ausreichend sein.
EN ISO 10218-2 enthält darüber hinaus weitergehende Anforderungen zum kollaborierenden Betrieb. Diese Anforderungen sind angelehnt an mögliche Applikationen. Im Folgenden sind einige ausgewählte Anforderungen näher beschrieben.
Bei Drucklegung dieser DGUV Information befand sich außerdem die internationale technische Spezifikation ISO TS 15066 in Vorbereitung. Diese technische Spezifikation dient dazu, während der Entwicklung neuartiger kollaborierender Robotersysteme weitere Anforderungen zu spezifizieren, um sie zu einem späteren Zeitpunkt in die Normenserie EN ISO 10218 zu überführen.
5.2 Handführung
Wenn der Roboter für Handführung vorgesehen ist, muss eine Handführungseinrichtung nahe am Endeffektor angebracht sein. Dies kann z.B. ein Kraft-/Momentensensor sein, wodurch der Roboter ähnlich einem Manipulator manuell geführt werden kann. Der Roboter muss dabei mit sicher reduzierter Geschwindigkeit betrieben werden. Die sicher reduzierte Geschwindigkeit muss die Anforderungen aus Abschnitt 4.1.3 erfüllen. Die Höhe der Geschwindigkeit ist nicht vorgeschrieben. Sie leitet sich aus der Risikobeurteilung ab.
Zusätzlich müssen ein Zustimmungsschalter und eine Not-Halt-Einrichtung leicht erreichbar vorgesehen werden. Zustimmungsschalter und Not-Halt müssen ebenfalls sicherheitsgerichtet ausgeführt sein.
Unter den Hebezeugen existieren ähnliche Geräte, für die jedoch eigene Normen gelten. Für Industrieroboter, die zur Handführung eingesetzt werden, sind jedoch, auch wenn es sich um Hebevorgänge handelt, immer die Anforderungen der EN ISO 10218-1 und EN ISO 10218-2 zu erfüllen.
5.3 Kraft- und/oder Leistungsbegrenzung
5.3.1 Prinzip
Generell muss sichergestellt sein, dass bei einem Kontakt zwischen Roboter oder Werkzeug und Person bestimmte Belastungskenngrößen nicht überschritten werden.
Verlässliche Grenzwerte für diese medizinischen und biomechanischen Anforderungen waren bei Drucklegung dieser DGUV Information in Vorbereitung. Hinsichtlich aktueller Grenzwerte wenden Sie sich bitte an die Deutsche Gesetzliche Unfallversicherung oder an Ihren zuständigen gesetzlichen Unfallversicherungsträger.
In einer früheren Ausgabe von EN ISO 10218-1 aus dem Jahr 2006 war eine maximale Leistung von 80W oder eine maximale Kraft von 150N an der Werkzeugaufnahme angeben. Diese pauschalen Werte wurden in der Folgeausgabe der zuvor genannten Norm wieder gestrichen. Es war festgestellt worden, dass biomechanische Grenzwerte nach Körperregionen differenziert betrachten werden müssen.
Abb. 50 Roboter mit Handführung [H]

Um den Druck auf die Körperregionen zu minimieren, sollten grundsätzlich alle Kanten des Robotersystems einschließlich der Werkzeuge gerundet sein.
Eine Möglichkeit zur Begrenzung der Kontaktkräfte besteht im Aufbringen von Schutzeinrichtungen direkt auf dem Roboter und ggf. auf dem Werkzeug. Hierzu eignen sich insbesondere taktile Schutzeinrichtungen. Sie lösen bei Kontakt mit einer Person einen Stopp aus. Auch eine Kombination von taktilen Schutzeinrichtungen mit kapazitiven oder induktiven Schutzeinrichtungen ist möglich (Abbildung 51).
5.3.2 Messung von Kraft und Druck
Im Rahmen der Risikobeurteilung der Applikation ist festzulegen, welche Stellungen des Roboters einschließlich Werkzeug für Messzwecke auszuwählen sind. Für die korrespondierenden Körperregionen sind typischerweise anzunehmen:
Die Kraft- oder Druckeinwirkung hängt von der Formgebung des Roboters, des Werkzeugs, des Werkstücks und aller sonstigen am Arbeitsprozess beteiligten Vorrichtungen ab (siehe auch EN ISO 10218-2). Große, kantige und schwere Werkstücke sind nach heutigem Stand der Technik für diese Art der Kollaboration nicht geeignet. Allein die Trägheit dieser Werkstücke führt in der Regel zur Überschreitung der Kraft- bzw. Druckgrenzen.
Abb. 51 Roboter mit taktilen Schutzeinrichtungen [L]

Abb. 52 Druckverteilung an einer kantigen Kontur (Beispiel)

Abb. 53 Kraftverlauf während eines Kontakts (Beispiel)

Besonders kritisch ist auch das Ablegen von Teilen in Vorrichtungen. Die Industrie verlangt dabei meist höchste Präzision, so dass z.B. am Greifer gern Zentriervorrichtungen verwendet werden. Die dabei entstehenden Scherkanten sind aufgrund der auftretenden Drücke nicht zu beherrschen. Scherkanten sind grundsätzlich zu vermeiden.
Des Weiteren sind die für den Kollaborationsbetrieb zugelassenen Stellungen des Roboters (Posen) ausschlaggebend. In der Regel müssen mithilfe der Funktion Sichere Position die Verfahrwege des Roboters begrenzt werden, um z.B. sensible Körperteile wie Kopf und Hals vom Arbeitsbereich auszuschließen.
5.3.3 Sicherheitsfunktionen
Die Anforderungen nach EN ISO 10218-1 und EN ISO 10218-2 gelten auch für kollaborierende Roboter. Neben den darin festgelegten obligatorischen Sicherheitsfunktionen wie Not-Halt, Sicherheitshalt und Zustimmungsschalter muss ein Roboter in der Funktion Leistungs- und Kraftbegrenzung (Power and Force Limiting) in der Regel mindestens über die folgenden zusätzlichen Sicherheitsfunktionen verfügen:
Sichere Überwachung des Drehmoments bzw. der Kraft
Unter Berücksichtigung der Kantengeometrien sämtlicher am Arbeitsprozess beteiligter Oberflächen des Robotersystems resultiert aus der roboterseitigen Überwachung der Kraft bzw. des Drehmoments auch die Überwachung des Drucks im Robotersystem.
Sichere Überwachung der Geschwindigkeit
Um sicherzustellen, dass bei einem eintretenden oder bevorstehenden Kontakt die Geschwindigkeit keine fehlerhaften Werte annimmt, muss, um die beim Kontakt zu gewährleistende Kraft einzuhalten, auch die Geschwindigkeit sicher überwacht werden.
Sichere Überwachung der Position
Um Arbeitsbereiche entsprechend der den Körperregionen zugeordneten Belastungsgrenzen definieren und abgrenzen zu können, muss der Roboter über eine sicher überwachte Position verfügen.
Die Sicherheitsfunktionen müssen Kategorie 3/PLd entsprechen. D. h., die Sicherheitsfunktionen müssen auch unter Fehlerfallbedingungen gegeben sein. Es reicht z.B. nicht aus, die Kraft nur im Normalzustand zu messen und zu dokumentieren. Auch bei Ausfall von Bauteilen, Hard- und Softwarefehlern dürfen keine Kraftüberschreitungen eintreten. Das Gleiche gilt für alle anderen Sicherheitsfunktionen (siehe Abschnitt 4.1.3).
Alternativ kann z.B. eine sichere Kraftbegrenzung auch durch inhärent sichere Konstruktion realisiert werden.
5.4 Geschwindigkeits- und Abstandsüberwachung
Bei der Geschwindigkeits- und Abstandsüberwachung werden nichttrennende Schutzeinrichtungen so eingesetzt, dass sich Personen jederzeit dem Roboter nähern können, ohne gefährdet zu werden.
Als Schutzeinrichtungen kommen z.B. optische Laserscanner oder 3D-Kameras in Betracht. Sie müssen die Annäherung von Personen sicher detektieren und die Roboterbewegungen entsprechend verlangsamen oder stoppen. Bei Vergrößerung des Abstands setzt der Roboter seine Bewegung ohne Quittierung fort. Die Geschwindigkeit muss sicher überwacht sein.
Wie auch das sonstige sicherheitsbezogene Steuerungssystem der Roboteranlage müssen auch diese optischen Schutzeinrichtungen die Anforderungen von EN ISO 13849-1 PLd in Verbindung mit Kategorie 3 erfüllen (siehe Abschnitt 4.1.3).
Die Sicherheitsabstände müssen EN ISO 13855 entsprechen. Daher ist die Geschwindigkeits- und Abstandsüberwachung in der Regel nur dort anwendbar, wo ausreichend Platz zur Verfügung steht. Zusätzlich ist zu beachten, dass sich nicht nur die Person der Gefahrstelle nähert, sondern dass sich auch die Gefahrstelle (Robotersystem) auf die Person zu bewegen kann.
5.5 Sicherheitsgerichteter Stopp
Beim sicherheitsgerichteten Stopp handelt es sich um einen Sonderfall der Geschwindigkeits- und Abstandsüberwachung. Bei Zutritt zum Kollaborationsraum werden die Antriebe sofort gestoppt und in einen sicheren Betriebshalt nach EN 61800-5-2 überführt (Safe Operating Stop/SOS). Bei Verlassen des Kollaborationsraums setzt der Roboter seine Bewegung ohne Quittierung fort. Die Höhe der Geschwindigkeit wird nach Risikobeurteilung festgelegt.
Abb. 54 Geschwindigkeits- und Abstandsüberwachung - Annäherung Roboter / Person [D]

6 Sonderbetriebsarten zur Prozessbeobachtung
6.1 Störungssuche - Prozessbeobachtung mit Zustimmungsschalter
Für die Störungssuche kann es erforderlich sein, ergänzend zu den normativen Betriebsarten T1, T2 (siehe Abschnitt 4.1.1) eine oder mehrere weitere Betriebsarten vorzusehen. Diese sollten bereits bei der Anlagenplanung in die Risikobeurteilung und in die Konstruktion einfließen, um den Instandhaltern ein sicheres Arbeiten zu ermöglich. Auch dem Umgehen von Schutzeinrichtungen ist so vorzubeugen.
Die Störungssuche muss zunächst von außerhalb der Gefahrbereiche durchgeführt werden. Weiterhin muss geprüft werden, ob die vom Roboterhersteller bzw. Maschinenhersteller vorgesehenen Roboterbetriebsarten T1, T2 angewendet werden können. Wenn dies nicht möglich ist, kann eine Sonderbetriebsart wie folgt vorgesehen werden:
6.2 Prozessbeobachtung ohne Zustimmungsschalter
Die Sonderbetriebsart Prozessbeobachtung ohne Zustimmungsschalter wird in EN ISO 10218-2 im informativen Anhang G behandelt. Genauere Informationen findet man in der ebenfalls harmonisierten Norm EN ISO 11161.
Diese Sonderbetriebsart gestattet in Ausnahmesituationen das zeitweise Beobachten von Prozessabläufen innerhalb eines Arbeitsraums, ohne dass eine Schalteinrichtung, z.B. Zustimmungsschalter, dauerhaft gedrückt werden muss. Diese Betriebsart sollte nur dann zum Einsatz kommen, wenn sich bei der Analyse der geplanten Fertigungsbedingungen zeigt, dass eine Produktion unter den normativ vorgesehenen Betriebsarten unmöglich ist (Automatik, T1, T2). Dies ist z.B. der Fall, wenn bestimmte Prozessabläufe eine zeitweise visuelle Beobachtung erfordern, die mit den normativvorgesehenen Betriebsarten und Schutzeinrichtungen (z.B. Zustimmungsschalter) aufgrund der Betätigungsdauer nicht zu realisieren ist. Auch der womöglich hohe wirtschaftliche Schaden bei versehentlichem Loslassen des Zustimmungsschalters ist zu berücksichtigen.
Die Entscheidungsgrundlage für eine Sonderbetriebsart Prozessbeobachtung ist die Risikobeurteilung des Maschinenherstellers (Integrator). Der Hersteller muss bei der Erstellung der Risikobeurteilung eng mit dem zukünftigen Betreiber zusammenarbeiten, um dessen Erfahrungen in die Risikobeurteilung einfließen zu lassen, z.B. zu erwartende ergonomische Probleme, Störungen, Sachschäden.
Im Ergebnis der Risikobeurteilung muss für den vorliegenden Sonderfall ein individuelles Maßnahmenpaket aus technischen und organisatorischen Schutzmaßnahmen festgelegt werden (Abbildung 56). Die Sonderbetriebsart Prozessbeobachtung ist daher keine Betriebsart für den normalen Prozessablauf.
Abb. 55 Zustimmungsschalter bei der Störungssuche [H]

Abb. 56 Sonderbetriebsart Prozessbeobachtung [6]

7 Wartung, Instandhaltung
Abb. 57 Schwerkraftbelastete Achse [H]

Abb. 58 Elektrische Energietrenneinrichtung [H]

Allgemeine Informationen zur Instandhaltung in Industriebetrieben enthält die Schrift DGUV Information 209-015 "Instandhalter" (bisher BGI 577). Hier wird daher nur auf einige roboterspezifische Anforderungen eingegangen.
7.1 Angaben in der Betriebsanleitung
Die Betriebsanleitung des Herstellers der Roboteranlage muss Angaben zur Wartung und Instandhaltung enthalten. Fehlen derartige Angaben, sollte möglichst noch vor der Inbetriebnahme der Anlage auf die Erstellung und Übergabe entsprechender Unterlagen hingewirkt werden. Der Hersteller ist dazu verpflichtet (EN ISO 10218-2, Maschinenrichtlinie Anhang Q.
Achtung: Es ist nicht gesetzlich festgelegt, in welcher Tiefe diese Unterlagen bereitgestellt werden müssen. Dies betrifft auch Stromlaufpläne, SPS-Programme u. dgl. Es empfiehlt sich daher immer, den Lieferumfang in dieser Hinsicht vertraglich festzulegen, z.B. im Lastenheft.
7.2 Technische Schutzmaßnahmen
Instandhaltungsarbeiten müssen wenn irgend möglich bei abgeschalteter Roboteranlage durchgeführt werden. Es sind Maßnahmen vorzusehen, die eine Wiederinbetriebnahme durch Unbefugte verhindern, z.B. Abschließen der Energietrenneinrichtungen, Beschilderung (Abbildung 58). Energiespeicher sind zu entlasten, z.B. durch mechanische Federn, Druckspeicher (hierzu siehe auch DGUV Information 209-070; bisher BGI/GUV-I 5100. Besonders ist bei Robotern auf Teile zu achten, z.B. Achsen, die durch Schwerkraft herabsinken oder- fallen können. Wenn sich die Bedienperson gelegentlich unter der Achse aufhalten muss, müssen bereits bei der Konstruktion technische Zusatzmaßnahmen vorgesehen werden, um ein plötzliches Versagen der Haltebremsen zu verhindern, z.B. zyklischer Bremsentest, redundante Bremsen, automatische Absteckvorrichtungen. Für Instandhaltungsarbeiten müssen die Achsen zusätzlich gesichert werden, z.B. durch Unterbauen oder Abstecken.
Ist es nicht möglich, die Wartungs- und Instandhaltungsarbeiten bei vollkommen abgeschalteter Anlage durchzuführen, müssen soweit möglich ersatzweise Schutzmaßnahmen vorgesehen werden. Hierzu zählen Zustimmungsschalter, Tippbetrieb, reduzierte Geschwindigkeit bzw. mechanische Hilfsmittel wie Zangen, Magnetgreifer und -vorrichtungen. Instandhaltungs- und Wartungsarbeiten, insbesondere bei unwirksamen Schutzeinrichtungen, dürfen nur von qualifiziertem Fachpersonal durchgeführt werden. Dieses Fachpersonal muss über alle Gefahren informiert sein, mit denen es umgeht, insbesondere auch über die schwer erkennbaren.
Regelmäßige Unterweisungen sind durchzuführen. Es ist zu empfehlen, dass die unterwiesenen Personen die Unterweisung mit ihrer Unterschrift bestätigen.
Ist mit einem Zutritt durch Unbefugte zu rechnen, sind zusätzlich Hinweisschilder und Absperrbänder vorzusehen. Dabei sollten standardisierte Zeichen entsprechend DIN 4844-2 verwendet werden.
Zu den Gefahren, die auch für unterwiesenes Personal nur schwer erkennbar sind, zählen insbesondere die automatischen Abläufe der Roboteranlagen, welche bei einer stillstehenden Anlage in einem vermeintlich gefahrlosen Zustand sind. Um möglichst rasch wieder produzieren zu können, kann dies dazu verleiten, durch Unwirksammachen der Verriegelungseinrichtungen in die Anlage zu gelangen. Die versehentliche Bedämpfung eines der zahlreichen in der Anlage vorhandenen Initiatoren, z.B. mit einem Werkzeug oder durch Teile des Werkstücks, kann dabei den nächsten Fahrbefehl des Roboters auslösen, eine Spannbewegung einleiten oder Ähnliches.
Konstruktive Vorkehrungen für den Fall des Ausfalls von berührungslos wirkenden Schutzeinrichtungen sind in Abschnitt 4.2.7 beschrieben.
7.3 Ferndiagnose
Moderne Roboteranlagen verfügen über Schnittstellen zur Ferndiagnose. Sie können an das Internet bzw. an das öffentliche Telefonnetz angeschlossen werden. Es ist damit dem Roboterhersteller möglich, bestimmte Fehlerzustände des Roboters zu diagnostizieren, ohne dass vor Ort beim Betreiber Servicekräfte anwesend sein müssen. Mit diesen Einrichtungen können aber auch die Steuerprogramme des Roboters teilweise oder vollständig verändert werden. Es ist außerdem möglich, dem Roboter Fahrbefehle zu erteilen, ohne dass vor Ort die entsprechenden Befehlstasten betätigt werden. Dies zeigt, dass bei Benutzung von Ferndiagnosesystemen besondere Vorsicht geboten ist. Schutz bieten nur die unter 4 beschriebenen Maßnahmen, wie Zustimmungsschalter oder gleichwertige von der Fernsteuerung unabhängige, übergeordnete Schutzmaßnahmen und eine umfassende Aufklärung der Beschäftigten über die Gefährdungen.
Auf die Gefahren beim Festbinden oder Festklemmen von Zustimmungsschaltern sollte ebenfalls in den Unterweisungen hingewiesen werden. Die Reduzierung der Geschwindigkeit des Roboters erfolgt bei einigen Roboterfabrikaten allein über die Software. Unkontrollierte Bewegungen des Roboters auch mit höheren Geschwindigkeiten können nicht ausgeschlossen werden. Nur ein wirksamer Zustimmungsschalter bietet in derartigen Situationen angemessenen Schutz.
7.4 Anforderungen der Instandhaltung an die Konstruktion
Die speziellen Erfordernisse der Instandhaltung sollten bereits frühzeitig abgefragt werden und im Zuge der Risikobeurteilung in die konstruktive Gestaltung der Anlage einfließen. Hierzu zählen z.B. Kontrolleinrichtungen, die möglichst vollständig außerhalb der Schutzeinrichtungen angeordnet werden sollten. Dies sind z.B. elektrische, pneumatische und hydraulische Anzeigegeräte, Klemmenkästen und Schaltschränke. So kann vorbeugend verhindert werden, dass die Beschäftigten bei der Störungssuche gezwungen sind, Schutzeinrichtungen außer Kraft zu setzen.
Abb. 59 Fester Zugang zum Schaltschrank mit Steigleiter und Podest [H]

Auch die Planung von Durchgängen und Aufstiegen gehört dazu. Hierauf ist besonders dann zu achten, wenn wegen der oft beengten Platzverhältnisse am Aufstellungsort z.B. Schaltschränke in erhöhte Position verlegt werden (Abbildung 59).
Merke: Alle Schaltkästen, Anzeigen, Pulte u. dgl., die einen regelmäßigen Zugriff, z.B. bei Betrieb, Wartung oder Reinigung, erfordern, müssen mit einem festen Zugang versehen werden, z.B. Podeste, Steigleitern. Mobile Leitern sind nicht ausreichend.
7.5 Wiederkehrende Prüfungen
Die wichtigsten für Roboteranlagen geltenden wiederkehrenden Prüfungen sind in Tabelle 7 zusammengefasst. Zusätzlich können weitere Prüfungen notwendig sein, wenn aufgrund zusätzlicher Gefahren weitere Unfallverhütungsvorschriften oder sonstige Regelwerke zur Anwendung kommen.
In Betrieb befindliche Roboteranlagen fallen unter den Geltungsbereich der Unfallverhütungsvorschrift "Grundsätze der Prävention" (DGUV Vorschrift 1; bisher BGV/GUV-V A1) sowie der Betriebssicherheitsverordnung (BetrSichV). In beiden Vorschriften werden wiederkehrende sicherheitstechnische Prüfungen gefordert. Es gilt auch die Technische Regel TRBS 1201 zur BetrSichV. Die Prüfintervalle sind aus einer Gefährdungsbeurteilung der einzelnen Arbeitsplätze abzuleiten. Sie müssen so festgelegt werden, dass die Roboteranlage nach allgemein zugänglichen Erkenntnisquellen und betrieblichen Erfahrungen im Zeitraum zwischen zwei Prüfungen sicher benutzt werden kann und richten sich nach folgenden Kriterien:
Tab. 7 Wiederkehrende Prüfungen
| Prüfgegenstand | Prüfgrundlage | Prüfintervall | Prüfumfang | Prüfer |
Schutzeinrichtungen z.B.:
| DGUV Vorschrift 1; bisher BGV/GUV-V A1, | jährlich 1) | Sicht- und Funktionsprüfung | Befähigte Person 2) |
| Not-Halt | DGUV Vorschrift 1; bisher BGV/GUV A1 | jährlich 1) | Sicht- und Funktionsprüfung | Befähigte Person 2) |
| Elektrische Ausrüstung | DGUV Vorschrift 3; bisher BGV/GUV A3, VDE 0105-100 | 4 Jahre 1) |
| Elektrofachkraft |
| Druckgeräte, z.B. Hydrospeicher | BetrSichV | 2, 5 und 10 Jahre | Äußere, innere und Festigkeitsprüfung | Zugelassene Überwachungsstelle |
| 1) empfohlen, soweit nach Gefährdungsbeurteilung am Arbeitsplatz nicht abweichend bestimmt 2) entspricht der bisherigen Qualifikation von Sachkundigen oder Elektrofachkraft | ||||
| Checkliste Betriebsanleitung für Maschinen | Anhang 1 |
Mindestanforderung nach MRL 2006/42/EG
| Firmenname und vollständige Anschrift des Herstellers und seiner Bevollmächtigten | [ ] |
| Bezeichnung der Maschine entsprechend der Angabe auf der Maschine selbst, ausgenommen die Seriennummer | [ ] |
| die EG-Konformitätserklärung oder ein Dokument, das die EG-Konformitätserklärung inhaltlich wiedergibt und Einzelangaben der Maschine enthält, das aber nicht zwangsläufig auch die Seriennummer und die Unterschrift enthalten muss | [ ] |
| eine allgemeine Beschreibung der Maschine | [ ] |
| eine Beschreibung des Arbeitsplatzes bzw. der Arbeitsplätze, die voraussichtlich vom Bedienungspersonal eingenommen werden | [ ] |
| eine Beschreibung der bestimmungsgemäßen Verwendung der Maschine | [ ] |
| Warnhinweise in Bezug auf Fehlanwendungen der Maschine, zu denen es erfahrungsgemäß kommen kann | [ ] |
| Anleitungen zur Montage, zum Aufbau und zum Anschluss der Maschine, einschließlich der Zeichnungen, Schaltpläne und der Befestigungen, sowie Angabe des Maschinengestells oder der Anlage, auf das bzw. in die die Maschine montiert werden soll | [ ] |
| Installations- und Montagevorschriften zur Verminderung von Lärm und Vibrationen | [ ] |
| Hinweise zur Inbetriebnahme und zum Betrieb der Maschine sowie erforderlichenfalls Hinweise zur Ausbildung bzw. Einarbeitung des Bedienungspersonals | [ ] |
| Angaben zu Restrisiken, die trotz der Maßnahmen zur Integration der Sicherheit bei der Konstruktion, trotz der Sicherheitsvorkehrungen und trotz der ergänzenden Schutzmaßnahmen noch verbleiben | [ ] |
| Anleitung für die vom Benutzer zu treffenden Schutzmaßnahmen, gegebenenfalls einschließlich der bereitzustellenden persönlichen Schutzausrüstung | [ ] |
| die wesentlichen Merkmale der Werkzeuge, die an der Maschine angebracht werden können | [ ] |
| Bedingungen, unter denen die Maschine die Anforderungen an die Standsicherheit beim Betrieb, beim Transport, bei der Montage, bei der Demontage, wenn sie außer Betrieb ist, bei Prüfungen sowie bei vorhersehbaren Störungen erfüllt | [_] |
| Sicherheitshinweise zum Transport, zur Handhabung und zur Lagerung mit Angabe des Gewichts der Maschine und ihrer verschiedenen Bauteile, falls sie regelmäßig getrennt transportiert werden müssen | [ ] |
| bei Unfällen oder Störungen erforderliches Vorgehen; falls es zu einer Blockierung kommen kann, ist in der Betriebsanleitung anzugeben, wie zum gefahrlosen Lösen der Blockierung vorzugehen ist | [ ] |
| Beschreibung der vom Benutzer durchzuführenden Einrichtungs- und Wartungsarbeiten sowie der zu treffenden vorbeugenden Wartungsmaßnahmen | [ ] |
| Anweisungen zum sicheren Einrichten und Warten einschließlich der dabei zu treffenden Schutzmaßnahmen | [ ] |
| Spezifikationen der zu verwendenden Ersatzteile, wenn diese sich auf die Sicherheit und Gesundheit des Bedienungspersonals auswirken | [ ] |
folgende Angaben zur Luftschallemission der Maschine:
| [ ] |
| Checkliste Benutzerinformation | Anhang 2 |
Mindestanforderungen nach EN ISO 10218-1
| Name, Anschrift und sonstige notwendige Kontaktinformationen zu Hersteller oder Lieferant | [ ] |
| Auflistung der einschlägigen Normen und Vorschriften, denen der Roboter entspricht, ggf. Informationen über Zertifizierungen durch Dritte | [ ] |
| Anweisungen für Inbetriebnahme, Wiederinbetriebnahme und die Programmierung | [ ] |
| Installationsanforderungen, wie z.B. Umgebungsbedingungen, Anschlusswerte, Bodenbelastung usw. | [ ] |
| Angaben, wie die Prüfungen des Roboters und seiner Schutzeinrichtungen vor der ersten Inbetriebnahme und vor dem Produktionseinsatz durchzuführen sind einschließlich einer Funktionsprüfung der reduzierten Geschwindigkeit | [ ] |
| Anweisungen für notwendige Prüfungen nach Änderung oder Austausch von Bauteilen oder optionalen Ergänzungen, die Sicherheitsfunktionen einschließlich zugehöriger Ausgänge beeinflussen können | [ ] |
| Anweisungen für sicheren Betrieb, Einrichten und Instandhaltung | [ ] |
| Angaben zu sicheren Arbeitsverfahren | [ ] |
| Angaben zur Vermeidung von Fehlern beim Zusammenbau während der Instandsetzung der Maschine | [ ] |
| Verfahren zur Beherrschung Gefahr bringender Energie | [ ] |
| Anleitungen für die Schulung des Bedienpersonals | [ ] |
| Angaben über den Einbauort und die Funktion aller Steuerungskomponenten | [ ] |
| Schaltpläne von den Schnittstellen der elektrischen, hydraulischen und pneumatischen Systeme, die für das Einrichten und die Installation erforderlich sind | [ ] |
| Angaben zur Betriebsart "Manuell Hohe Geschwindigkeit" einschließlich der sicheren Arbeitsverfahren | [ ] |
| Ein Hinweis darauf, dass die manuellen Betriebsarten möglichst nur dann ausgeführt werden sollen, wenn sich alle Personen außerhalb des geschützten Raumes befinden | [ ] |
| Informationen über die Verwendung der Zustimmungseinrichtungen | [ ] |
| Anweisungen für die Installation von zusätzlichen Zustimmungseinrichtungen | [ ] |
| Das Leistungsvermögen der sicherheitsbezogenen Schaltkreise (Kategorie und Performance Level oder SIL) ggf. mit allen Einschränkungen und zusätzlichen Bedingungen | [ ] |
| Beschreibung über den Einbau von Begrenzungseinrichtungen | [ ] |
| Anzahl, Lage, Realisierung, Einstellbereich und Einstellabstufung der mechanischen und nicht mechanischen Begrenzungseinrichtungen | [ ] |
| Angaben zu Anhaltezeit und Anhalteweg oder -winke! ab Auslösen des Stoppsignals für die drei Achsen mit der größten Auslenkung und Bewegung | [ ] |
| Spezifikationen für alle im Roboter verwendeten Schmiermittel, Fluide und anderen Hilfsstoffe einschließlich Angaben zur korrekten Auswahl, Vorbereitung, Anwendung und Bestandsführung | [_] |
| Eine Beschreibung über Maßnahmen zum Befreien von Personen, die in den Roboter oder durch den Roboter eingeklemmt sind | [ ] |
| Warnungen darüber, dass beim Lösen der Bremsen durch die Schwerkraft zusätzliche Gefährdungen entstehen können Anweisungen für das Verhalten in Notfällen oder anormalen Situationen | [ ] |
| Angaben zum Bewegungsbereich, zur maximalen Traglast und zur Lage des Werkzeugschwerpunktes | [ ] |
| Alle Informationen, die für den Ein- oder Anbau von Zusatzaggregaten notwendig sind | [ ] |
| Zusätzlich, wenn die Achs- und Raumbegrenzung mittels sicherheitsgerichteter Software realisiert ist: | |
| eine ausführliche Beschreibung der Funktion mit Angabe zum Leistungsvermögen (PL oder SIL) | [ ] |
| die Worst-Case-Anhaltezeit bei maximaler Geschwindigkeit, einschließlich Überwachungszeit und Nachlaufweg und der tatsächlich zu erwarteten Halteposition | [ ] |
| Zusätzlich bei kabellosen oder absteckbaren Programmierhandgeräten: | |
| die maximalen Ansprechzeiten für die Datenkommunikation (einschließlich Fehlerkorrektur) | [ ] |
| die maximalen Ansprechzeiten für den Datenverlust | [ ] |
| Hinweise für den Betreiber, wie das Verwechseln von aktivierten und deaktivierten Not-Halt-Einrichtungen vermieden werden kann | [ ] |
| Checkliste Technische Unterlagen (Nachweisdokumentation) | Anhang 3 |
| "Technische Unterlagen" (für vollständige Maschinen) | "Spezielle Technische Unterlagen" (für unvollständige Maschinen) | |
| allgemeine Beschreibung der Maschine | [ ] | |
| Übersichtszeichnung der (unvollständigen) Maschine | [ ] | [ ] |
| Schaltpläne der Steuerkreise | [ ] | [ ] |
| Beschreibungen und Erläuterungen, die zum Verständnis der Funktionsweise der Maschine erforderlich sind | [ ] | |
| Detailzeichnungen mit Berechnungen, Versuchsergebnissen, Bescheinigungen usw. zur Übereinstimmung der (unvollständigen) Maschine mit den grundlegenden Sicherheits- und Gesundheitsschutzanforderungen | [ ] | [ ] |
| die Unterlagen über die Risikobeurteilung, aus denen hervorgeht, welches Verfahren angewandt wurde | [ ] | [ ] |
| eine Liste der grundlegenden Sicherheits- und Gesundheitsschutzanforderungen, die für die Maschine gelten | [ ] | |
| eine Liste der grundlegenden Sicherheits- und Gesundheitsschutzanforderungen, die angewandt wurden und eingehalten werden | [ ] | |
| Beschreibung der verwendeten Schutzmaßnahmen | [ ] | [ ] |
| Angabe zu den Restrisiken | [ ] | [ ] |
| angewandte Normen und sonstige technische Spezifikationen | [ ] | [ ] |
| grundlegende Sicherheits- und Gesundheitsschutzanforderungen, die von diesen Normen erfasst werden | [ ] | [ ] |
| alle technischen Berichte mit den Ergebnissen der Prüfungen, die an der (unvollständigen) Maschine durchgeführt wurden | [ ] | [ ] |
| Ergebnisse der Prüfungen und Versuche, die durchgeführt wurden, um festzustellen, ob die unvollständige Maschine aufgrund ihrer Konzeption oder Bauart sicher zusammengebaut und benutzt werden kann | [ ] | |
| Betriebsanleitung der Maschine | [ ] | |
| ein Exemplar der Montageanleitung für die unvollständige Maschine | [ ] | |
| gegebenenfalls Einbauerklärungen und Montageanleitungen der verwendeten unvollständigen Maschinen | [ ] | |
| Kopie der EG-Konformitätserklärung für in die Maschine eingebaute andere Maschinen oder Produkte | [ ] | |
| Kopie der EG-Konformitätserklärung | [ ] | |
| bei Serienfertigung eine Aufstellung der intern getroffenen Maßnahmen zur Gewährleistung der Übereinstimmung aller gefertigten unvollständigen Maschinen mit den Bestimmungen dieser Richtlinie | [ ] | |
| bei Serienfertigung eine Aufstellung der intern getroffenen Maßnahmen zur Gewährleistung der Übereinstimmung aller gefertigten unvollständigen Maschinen mit den angewandten grundlegenden Sicherheits- und Gesundheitsschutzanforderungen | [ ] |
| Beispiel Einbauerklärung | Anhang 4 |
| ||||||||||||||||
Beispiel - Liste der eingehaltenen grundlegenden Anforderungen nach Anhang 1, RL 2006/42/EG
Produktbezeichnung: 6-Achs Industrieroboter
Modell:
Herkules 500
Handelsbezeichnung:
H 500-6
| Kapitel | Anforderungen | Für den Umfang der Teilmaschine (Roboter) erfüllt | Durch den Systemintegrator für die Gesamtmaschine zu leisten | nicht relevant |
| 1. | Gundlegende Sicherheits- und Gesundheitsschutzanforderungen | |||
| 1.1. | Allgemeines | |||
| 1.1.1. | Begriffsbestimmungen | |||
| 1.1.2. | Grundsätze für die Integration der Sicherheit | X | X | |
| 1.1.3. | Materialien und Produkte | X | X | |
| 1.1.4. | Beleuchtung | X | X | |
| 1.1.5. | Konstruktion der Maschine im Hinblick auf die Handhabung | X | X | |
| 1.1.6. | Ergonomie | X | X | |
| 1.1.7. | Bedienungsplätze | X | ||
| 1.1.8. | Sitze | X | ||
| 1.2. | Steuerungen und Befehlseinrichtungen | |||
| 1.2.1. | Sicherheit und Zuverlässigkeit von Steuerungen | X | X | |
| 1.2.2. | Stellteile | X | X | |
| 1.2.3. | Ingangsetzen | X | X | |
| 1.2.4. | Stillsetzen | X | X | |
| 1.2.4.1. | Normales Stillsetzen | X | ||
| 1.2.4.2. | Betriebsbedingtes Stillsetzen | X | ||
| 1.2.4.3. | Stillsetzen im Notfall | X | ||
| 1.2.5. | Wahl der Steuerungs- oder Betriebsarten | X | ||
| 1.2.6. | Störung der Energieversorgung | X | ||
| 1.3. | Schutzmaßnahmen gegen mechanische Gefährdungen | |||
| 1.3.1. | Risiko des Verlusts der Standsicherheit | X | ||
| 1.3.2. | Bruchrisiko beim Betrieb | X | ||
| 1.3.3. | Risiken durch herabfallende oder herausgeschleuderte Gegenstände | X | ||
| 1.3.4. | Risiken durch Oberflächen, Kanten und Ecken | X | ||
| 1.3.5. | Risiken durch mehrfach kombinierte Maschinen | X | ||
| 1.3.6. | Risiken durch Änderung der Verwendungsbedingungen | X | ||
| 1.3.7. | Risiken durch bewegliche Teile | X | X | |
| 1.3.8. | Wahl der Schutzeinrichtungen gegen Risiken durch bewegliche Teile | X | ||
| 1.3.8.1. | Bewegliche Teile der Kraftübertragung | X | X | |
| 1.3.8.2 | Bewegliche Teile, die am Arbeitsprozess beteiligt sind | X | ||
| 1.3.9. | Risiko unkontrollierter Bewegungen | X | X | |
| 1.4. | Anforderungen an Schutzeinrichtungen | |||
| 1.4.1. | Allgemeine Anforderungen | X | ||
| 1.4.2. | Besondere Anforderungen an trennende Schutzeinrichtungen | X | ||
| 1.4.2.1. | Feststehende trennende Schutzeinrichtungen | X | ||
| 1.4.2.2. | Bewegliche trennende Schutzeinrichtungen mit Verriegelung | X | ||
| 1.4.2.3. | Zugangsbeschränkende verstellbare Schutzeinrichtungen | X | ||
| 1.4.3. | Besondere Anforderungen an nichttrennende Schutzeinrichtungen | X | ||
| 1.5. | Risiken durch sonstige Gefährdungen | |||
| 1.5.1. | Elektrische Energieversorgung | X | X | |
| 1.5.2. | Statische Elektrizität | X | X | |
| 1.5.3. | Nichtelektrische Energieversorgung | X | ||
| 1.5.4. | Montagefehler | X | X | |
| 1.5.5. | Extreme Temperaturen | X | ||
| 1.5.6. | Brand | X | ||
| 1.5.7. | Explosion | X | ||
| 1.5.8. | Lärm | X | X | |
| 1.5.9. | Vibrationen | X | ||
| 1.5.10. | Strahlung | X | ||
| 1.5.11. | Strahlung von außen | X | ||
| 1.5.12. | Laserstrahlung | X | ||
| 1.5.13. | Emission gefährlicher Werkstoffe und Substanzen | X | X | |
| 1.5.14. | Risiko, in einer Maschine eingeschlossen zu werden | X | ||
| 1.5.15. | Ausrutsch-, Stolper- und Sturzrisiko | X | ||
| 1.5.16. | Blitzschlag | X | X | |
| 1.6. | Instandhaltung | |||
| 1.6.1. | Wartung der Maschine | X | X | |
| 1.6.2. | Zugang zu den Bedienungsständen und den Eingriffspunkten für die Instandhaltung | X | ||
| 1.6.3. | Trennung von den Energiequellen | X | X | |
| 1.6.4. | Eingriffe des Bedienungspersonals | X | ||
| 1.6.5. | Reinigung innen liegender Maschinenteile | X | ||
| 1.7. | Informationen | |||
| 1.7.1. | Informationen und Warnhinweise an der Maschine | X | X | |
| 1.7.1.1. | Informationen und Informationseinrichtungen | X | X | |
| 1.7.1.2. | Warneinrichtungen | X | ||
| 1.7.2. | Warnung vor Restrisiken | X | ||
| 1.7.3. | Kennzeichnung der Maschinen | X | X | |
| 1.7.4. | Betriebsanleitung | X | ||
| 1.7.4.1. | Allgem. Grundsätze für die Abfassung der Betriebsanleitung | X | ||
| 1.7.4.2. | Inhalt der Betriebsanleitung | X | ||
| 1.7.4.3. | Verkaufsprospekte | X | X | |
| 2. | Zusätzliche grundlegende Sicherheits- und Gesundheitsschutzanforderungen an bestimmte Maschinengattungen | |||
| 2.1. | Nahrungsmittelmaschinen und Maschinen für kosmetische oder pharmazeutische Erzeugnisse | X | ||
| 2.2. | Handgehaltene und/oder handgeführte tragbare Maschinen | X | ||
| 3 | Zusätzliche grundlegende Sicherheits- und Gesundheitsschutzanforderungen zur Ausschaltung der Gefährdungen, die von der Beweglichkeit von Maschinen ausgehen. | X | ||
| 4 | Zusätzliche grundlegende Sicherheits- und Gesundheitsschutzanforderungen zur Ausschaltung der durch Hebevorgänge bedingten Gefährdungen. | X | ||
| 5 | Zusätzliche grundlegende Sicherheits- und Gesundheitsschutzanforderungen an Maschinen, die zum Einsatz unter Tage bestimmt sind. | X | ||
| 6 | Zusätzliche grundlegende Sicherheits- und Gesundheitsschutzanforderungen an Maschinen, von denen durch das Heben von Personen bedingte Gefährdungen ausgehen. | X | ||
| Beispiel einer Montageanleitung nach Anhang VI, RL 2006/42/EG (Auszug) | Anhang 5 |
Produktbezeichnung: 6-Achs Industrieroboter
Modell: Herkules 500
Handelsbezeichnung: H 500-6
Nachfolgende Anleitung gibt dem, der oben genannte unvollständige Maschine in eine Maschine einbaut oder mit anderen Teilen zu einer vollständigen Maschine zusammenbaut, die notwendigen Informationen, insbesondere über die sicherheitsrelevanten Schnittstellen, für den ordnungsgemäßen Zusammenbau ohne Beeinträchtigung der Sicherheit und Gesundheit von Personen.
Zusätzlich zu dieser Montageanleitung sind die relevanten europäischen Richtlinien und nationalen Vorschriften zu beachten.
Zur Übereinstimmung mit den grundsätzlichen Anforderungen der EG-Maschinenrichtlinie wird empfohlen, die beiden Normen für Industrieroboter-Sicherheitsanforderungen EN ISO 10218-1 und EN ISO 10218-2 anzuwenden.
Die Montageanleitung verbleibt zusammen mit der Einbauerklärung bei der unvollständigen Maschine bis zu deren Einbau in die vollständige Maschine und ist danach den technischen Unterlagen der vollständigen Maschine beizufügen.
Inhalt der Montageanleitung
| Beispiel einer EG-Konformitätserklärung für eine Roboterzelle | Anhang 6 |
| ||||||||||
| Beispiel einer Risikobeurteilung für eine Roboteranlage | Anhang 7 |
Hinweis: Nach Richtlinie 2006/42/EG (Maschinenrichtlinie) Anhang VII müssen im Rahmen der internen Dokumentation des Herstellers schriftliche Unterlagen über die Risikobeurteilung vorliegen. Bei eventuellen Zweifeln an der Sicherheit der Maschine können Behörden (z.B. Marktaufsicht) Einsicht in diese Unterlagen verlangen.
Ein vorgeschriebenes Format zur Abfassung der Dokumentation der Risikobeurteilung existiert nicht. Die nachfolgende Darstellung entspricht einer derzeit in Fachkreisen bevorzugten Vorgehensweise.
In vielen Fällen wird nur das Arbeitsblatt der Risikobeurteilung (Punkt 2 dieses Anhangs) dokumentiert. Der Punkt 1 stellt jedoch eine nützliche Erweiterung dar, da die Definition der Grenzen der Maschine generell Ausgangspunkt jeder Risikobeurteilung sein sollte.
Nach dem Arbeitsblatt der Risikobeurteilung (Punkt 2 dieses Anhangs) wird der Risikolevel zweimal ermittelt: einmal vor und einmal nach der jeweiligen Schutzmaßnahme. Auch diese Vorgehensweise ist nicht verpflichtend, hat sich aber gerade in jüngster Vergangenheit etabliert. Außerdem entspricht sie neben der ISO TR 14121-2 [11] auch der ANSI B11 TR3 [19] und ist somit auch in den USA bekannt.
Das Beispiel erhebt keinen Anspruch auf Vollständigkeit.
Sonstige nach Anhang VII der Maschinenrichtlinie geforderte Unterlagen der internen Dokumentation des Herstellers sind hier nicht aufgeführt.
1. Grenzen der Maschine
1.1 Beschreibung der Maschine
Die Maschine IR-D5 ist eine Industrieroboteranlage zur automatischen Bearbeitung von Kunststofftanks für die Automobilfertigung. Die Rohteile werden von einer Person manuell auf einen 5-Segment-Drehtisch aufgelegt. Nach Quittierung und Start am Bedienpult erfolgt der automatische Transport des Teils zum Industrieroboter 1 (Beflammung). Durch die Beflammung wird die Kunststoffoberfläche für den anschließenden Primerauftrag am Industrieroboter 2 vorbereitet. Durch Industrieroboter 3 erfolgt die Ablage auf das Entnahmeband.
Abb. 60 Industrieroboteranlage IR-D5 [F]

| Muster GmbH Straße
| Risikobeurteilung | Seite x von y | |||
| Produkt: Industrieroboteranlage | Typ: IR-D5 Ser.-Nr. 01 Baujahr: 2015 | Kunde: Sample GmbH | Bearbeiter: Mustermann Datum: | Datei: | |
1.2 Verwendungsgrenzen - Bestimmungsgemäße Verwendung und vorhersehbare Fehlanwendung
Die Maschine darf nur für die in der Betriebsanleitung aufgeführten Werk- und Hilfsstoffe eingesetzt werden. Es dürfen nur die in der Betriebsanleitung angegebenen Prozessparameter/Technischen Daten zum Einsatz kommen. Werden abweichende Prozessparameter/Technische Daten eingestellt oder abweichende Werk- und Hilfsstoffe verwendet, so wird empfohlen, dies beim Maschinenhersteller anzufragen.
Diese Risikobeurteilung kann Risiken, hervorgerufen durch abweichende Prozessparameter/Technische Daten sowie abweichende Werk- und Hilfsstoffe, nicht abdecken. Das Gleiche gilt für nach Inverkehrbringen vorgenommene Umbauten. Es wird empfohlen, in diesen Fällen durch den Maschinenbetreiber eine Gefährdungsbeurteilung nach Betriebssicherheitsverordnung durchzuführen und eventuell ergänzende Schutzmaßnahmen festzulegen. Es ist möglich, dass aufgrund gravierender Veränderung der in dieser Risikobeurteilung festgestellten Risiken eine sogenannte Wesentliche Veränderung eintritt, die eine erneute Konformitätsbewertung der Maschine einschließlich neuer Risikobeurteilung erfordert.
Eine Liste der freigegebenen Werk- und Hilfsstoffe ist Bestandteil der Betriebsanleitung
1.3 Räumliche Grenzen - Technische Daten (Auszug)
Die räumlichen Grenzen der Maschine sind im Aufstellplan der Maschine definiert. Im Aufstellplan sind auch die Schnittstellen zu kundenseitigen Ver- und Entsorgungseinrichtungen sowie Anforderungen an die Umgebung festgelegt.
Technische Daten (Auszug):
| Elektrische Anschlusswerte: | Netzspannung: 3 x 400 V, 50/60 Hz Absicherung 25 A |
| Druckluftanschluss: | 6 bar, Verbrauch 2,5 m3/h |
| Gasanschlussdruck: | 20 mbar |
| Masse: | 4500 kg |
| Umgebungstemperatur: | 5 °C - 45 °C |
| Relative Luftfeuchte: | Max. 95 % |
| Geräuschemission: | 76 dB(A) an den Arbeitsplätzen |
| Abmessungen L/B/H: | 6500 mm/ 4200 mm/ 3200 mm |
1.4 Lebensphasen - Zeitliche Grenzen
Diese Risikobeurteilung umfasst die Lebensphasen Betrieb/ Produktion (Automatikbetrieb, Einrichtbetrieb), Reinigung, Wartung/ Instandhaltung und Entsorgung. Davor liegende Lebensphasen wie z.B. Aufstellen, Montage, Inbetriebnahme und Probebetrieb sind in dieser Risikobeurteilung nicht enthalten, da sie für diese Maschine Teil des Herstellungsprozesses sind.
1.5 Normen und Richtlinien
Diese Risikobeurteilung wurde erstellt nach den Prinzipien der EG-Richtlinie 2006/42/EG (Maschinenrichtlinie) und den harmonisierten Normen bzw. technischen Spezifikationen EN ISO 10218-1, EN ISO 10218-2, EN ISO 12100 und ISO/TR 14121-2.
2. Risikobeurteilung - Arbeitsblatt
Das im Folgenden gezeigte Arbeitsblatt einer Risikobeurteilung beruht auf ISO/TR 14121-2 Tabelle A.3 (gleichwertig mit ANSI B11 TR3).
| Eintrittswahrscheinlichkeit | Schadensausmaß | |||
| Katastrophal | Schwerwiegend | Mittelmäßig | Geringfügig | |
| Sehr wahrscheinlich | hoch | hoch | hoch | mittel |
| Wahrscheinlich | hoch | hoch | mittel | gering |
| Unwahrscheinlich | mittel | mittel | gering | vernachlässigbar |
| Entfernt vorstellbar | gering | gering | vernachlässigbar | vernachlässigbar |
| Legende
Schadensausmaß: Eintrittswahrscheinlichkeit | ||||
| Muster GmbH Straße PLZ/Ort | Risikobeurteilung nach ISO/TR 14121-2 | Seite x von y | |||||||
| Produkt: Industrieroboteranlage | Typ: IR-D5 Yp' Ser.-Nr. 01 Baujahr: 2015 | Kunde: Sample GmbH | Bearbeiter:
Mustermann Datum: | Datei: | |||||
| Lebensphase/ Betriebsart | Gefährdung (aus Gefährdungs- katalog nach EN ISO 12100) | Gefahren- situation, Gefahrstelle | Risikoeinschätzung ISO/TR 14121-2 Tabelle A.3 Vor Schutzmaßnahme nach | Schutzmaßnahme | Risikoeinschätzung nach ISO/TR 14121-2 Tabelle A.3 Nach Schutzmaßnahme | Norm- referenz oder Richtlinie | Risiko- redu- zierung aus- reich- end? | ||
| Schadens- ausmaß/ Wahr- scheinlich- keit | Risiko- Level | Schadens- ausmaß/ Wahrschein- lichkeit | Risiko- Level | ||||||
| Automatik- betrieb | Quetschen, Stoß | Einquetschen von Personen zwischen 2 Robotern oder zwischen Drehtisch und Roboter bei der Beseitigung von Störungen Personen werden von den automatischen Bewegungen gestoßen. | Schwer- wiegend/ Wahrschein- lich | Hoch | Der komplette Bewegungsbereich der Roboter ist mit trennenden und nichttrennenden Schutzeinrichtungen umgeben. Es sind ausreichend Schutztüren mit Verriegelung und Zuhaltung vorhanden. Nach Anforderung kann die Anlage zur Störungsbeseitigung durch die Schutztüren betreten werden. Elektrische Verriegelung der Schutztüren mit den gefahrbringenden Bewegungen (Roboter und Drehtisch) entspr. EN ISO 13849-1 Kategorie 3, PLd. Roboter fahren in Safe-Position. Antriebe bleiben in Regelung. Bei nichtbetätigter Safe-Pos. und gleichzeitiger Türöffnung werden Antriebe kontaktbehaftet stillgesetzt. Alle Achsen einschließlich Drehtisch können mit reduzierter Geschwindigkeit und Zustimmungsschalter bei offenen Schutztüren gefahren werden. | Schwer- wiegend/ Entfernt vorstellbar | Gering | RL 2006/42/EG EN ISO 10218-1 EN ISO 10218-2 | Ja |
| Quetschen, Stoß | Einquetschen von Personen bei Weiterlauf der Roboter während des Einlegens | Schwer- wiegend/ Wahrschein- lich | Hoch | Mitdrehende Trennbleche (Segmente) auf dem Drehtisch Sichere Achsbegrenzungen der Roboter entspr. EN ISO 13849-1 Kategorie 3, PLd | Schwer- wiegend/ Entfernt vorstellbar | Gering | EN ISO 13849-1 | Ja | |
| Erfassen | Erfassen des Bedieners am Einlegeplatz durch Drehtisch | Schwer- wiegend/ Wahrschein- lich | Hoch | Sichere Abschaltung des Drehtisches durch Sicherheitslicht- vorhang Typ 4. Auflösung 14 mm. Abstand zur Gefahrstelle entspr. EN ISO 13855. Liegender Lichtvorhang als Hintertretschutz. Quittiertaster außerhalb an Säule, von innen nicht erreichbar. Gute Sicht vom Standpunkt der Quittierung. Hinweise in der Betriebsanleitung zum Beschicken der Anlage. Die Quittierung darf nur erfolgen, wenn sich keine Personen im Gefahrenraum aufhalten. | Schwer- wiegend/ Entfernt vorstellbar | Gering | EN ISO 13855 EN ISO 10218-1 EN ISO 10218-2 | Ja | |
| Quetschen | Quetschen am Entnahmeband zwischen Anschlag und Teil | Mittelmäßig/ Wahrschein- lich | Mittel | Anschlag als Kurvenkulisse geformt. Quetschgefahr beseitigt. Kunststoffteile mit geringem Gewicht. Bandgeschwindigkeit max. 6 m/min | Geringfügig/ Entfernt vorstellbar | Vernach- lässigbar | EN ISO 10218-1 EN ISO 10218-2 | Ja | |
| Lärm | Gehörschä- digung durch Produktionslärm | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | Schalldruckpegel am Arbeitsplatz messen und in der Betriebsanleitung angeben | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | EN ISO 10218-2 | Ja | |
| Feuer | Unerwartetes Brennen von Teilen aufgrund von Störung | Geringfügig/ Wahrschein- lich | Gering | Handfeuerlöscher an der Anlage. Not-Halt schaltet Beflammung sicher aus. | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | Ja | ||
| Automatik- betrieb | Abgase | Ansammlung von Abgasen aufgrund von Beflammung | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | Die Abgasentwicklung ist bei Beachtung der Prozessparameter gering. Gute Belüftung der Produktionshalle ist ausreichend. | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | Ja | |
| Verbrennungen | Zutritt zum Arbeitsraum bei laufender Beflammung | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | Zutritt wird durch Zuhaltung verhindert.
Bei Erreichen der Safe-Position wird eine Flammenüber- wachung wirksam. | Geringfügig/ Entfernt vorstellbar | Vernach- lässigbar | Ja | ||
| Ergonomie | Unergono- mischer Zugang zum Befüllen der Behälter | Mittelmäßig/ Wahrschein- lich | Mittel | Befüllstutzen von außerhalb des Schutzzaunes zugänglich und leicht erreichbar | Geringfügig/ Entfernt vorstellbar | Vernach- lässigbar | EN ISO 10218-2 | Ja | |
| Einrichten/ Program- mieren | Quetschen, Stoß | Programmieren der Roboteranlage innerhalb der Schutzein- richtungen | Schwer- wiegend/ Wahrschein- lich | Hoch | Dreistufiger Zustimmungstaster im PH G. Ausführung der Schaltung für Betriebsartenwahl und Zustimmungsfunktion entspr.
Kategorie 3, PLd. Abschließbarer Betriebsarten- wahlschalter Reduzierte Geschwindigkeit T1: 250 mm/s | Schwer- wiegend/ Entfernt vorstellbar | Gering | EN ISO 10218-1 EN ISO 10218-2 | Ja |
| Quetschen, Stoß | Quetschung bei Weitertakten des Drehtisches von innerhalb des Arbeitsraums | Schwer- wiegend / Wahrschein- lich | Hoch | Takten des Tisches nur mit ortsbindender Zustimmungs- einrichtung (fest angebaut) | Schwer- wiegend/ Entfernt vorstellbar | Gering | Ja | ||
| Umstürzen, Herabfallen | Umstürzen des Roboters | Schwer- wiegend/ Wahrschein- lich | Hoch | Verankerung des Roboters im Boden ausreichend dimensioniert Roboter darf nicht überlastet werden, z.B. durch zu schweren Greiferanbau. Maximale Last siehe Typenschild Roboter darf nicht gegen festen Widerstand fahren Sicherheitsan- forderungen in Betriebsanleitung | Schwer- wiegend/ Entfernt vorstellbar | Gering | Ja | ||
| Quetschen, Stoß | Herabsinken durch Schwerkraft | Mittelmäßig/ Wahrschein- lich | Mittel | Alle angetriebenen Achsen haben Haltebremsen. Selbsttätig wirkenden Bremsentest vorsehen | Mittelmäßig/ Entfernt vorstellbar | Vernach- lässigbar | EN ISO 10218-2 | Ja | |
| Reinigung | Quetschen, Scheren, Erfassen, Stoß | Einschluss im Arbeitsraum | Schwer- wiegend/ Unwahr- scheinlich | Mittel | Quittiertaster an jeder Zugangstür, von wo aus ein guter Blick auf den Gefahrenraum möglich ist. Von innen nicht erreichbar Selbsttätiges Zufallen der Türen durch Schloss verhindert Zuhaltung spannungslos freigebend Hinweise in der Betriebsanleitung zur Quittierung der Schutztüren | Schwer- wiegend/ Entfernt vorstellbar | Gering | EN ISO 10218-2 | Ja |
| Wartung/ Instand- haltung | Gefährdung durch Werkstoffe | Einfüllen von Primermaterial. Flüssigkeit spritzt auf Körperteile | Mittelmäßig/ Wahrschein- lich | Mittel | Persönliche Schutzausrüstung (Schutzbrille) mitliefern oder speziellen Typ vorgeben Typenauswahl des Primers in Betriebsanleitung vorgeben Wartung darf nur von unterwiesenem Fachpersonal mit entsprechender Arbeitskleidung durchgeführt werden. Hinweise in Betriebsanleitung | Mittelmäßig/ Unwahr- scheinlich | Gering | Ja | |
| Ergonomie | Unergonomischer Zugang zu Wartungs- punkten | Mittelmäßig/ Wahrschein- lich | Mittel | Verteilerkästen, Schaltschränke, Medienabsperr- ventile von außerhalb des Schutzzaunes zugänglich | Geringfügig/ Entfernt vorstellbar | Vernach- lässigbar | EN 15010218-2 | Ja | |
| Quetschen, Stoß | Herabsinken von Komponenten durch Schwerkraft bei Lösen der Haltebremsen | Mittelmäßig/ Wahrschein- lich | Mittel | Selbsttätig wirkenden Bremsentest vorsehen Bei Reparatur- und Wartungsarbeiten Achsen unterbauen. Hinweise in Betriebsanleitung. Mittels Warnschild auf schwerkraft- belastete Achsen hinweisen. | Mittelmäßig/ Entfernt vorstellbar | Vernach- lässigbar | EN 15010218-2 | Ja | |
| Quetschen, Stoß | Unerwarteter Anlauf | Mittelmäßig/ Wahrschein- lich | Mittel | Alle externen Energiearten elektrisch, hydraulisch, Druckluft müssen absperrbar und gegen Wiedereinschalten sicherbar sein. | Mittelmäßig/ Unwahr- scheinlich | Gering | EN ISO 10218-2 | Ja | |
| Berührung spannungs- führender Teile | Wartungs- personal arbeitet an unter Spannung stehen- der Anlage | Schwer- wiegend/ Wahrschein- lich | Hoch | Vor Wartungsarbeiten Hauptschalter ausschalten und gegen Wiedereinschalten sichern.
Wartungspersonal muss unterwiesen werden, Arbeiten unter Spannung nur in Ausnahmefällen durch Elektrofachkräfte Hinweise in Betriebsanleitung Schulung des Servicepersonals durch Hersteller | Geringfügig/ Unwahr- scheinlich | Vernach- lässigbar | EN ISO 10218-2 | Ja | |
| Entsorgung | Gesundheits- gefährdende Stoffe | Unsachgemäße Entsorgung bei Verschrottung der Anlage | Mittelmäßig/ Wahrschein- lich | Mittel | Fachgerechte Entsorgung in Betriebsanleitung beschreiben Deklarierung der gesundheits- und umweltgefährdenden Stoffe | Mittelmäßig/ Unwahr- scheinlich | Gering | Ja | |
| Alle Lebensphasen | Elektrizität | Gefährdung durch elektrischen Schlag | Mittelmäßig/ Wahrschein- lich | Mittel | Ausführung der Anlage entspr.
EN 60204-1. Durchführung der Prüfungen
| Mittel- mäßig/ Entfernt vorstellbar | Vernach- lässigbar | EN 15010218-2 | Ja |
Literaturverzeichnis
Nachstehend sind die insbesondere zu beachtenden einschlägigen Vorschriften, Regeln und Informationen zusammengestellt.
1. Gesetze, Verordnungen
Bezugsquelle:
Buchhandel und Internet: z.B. www.gesetzeim-internet.de
2. Vorschriften, Regeln und Informationen für Sicherheit und Gesundheit bei der Arbeit
Bezugsquelle:
Bei Ihrem zuständigen Unfallversicherungsträger und unter www.dguv.de/publikationen
Informationen
3. Normen/VDE-Bestimmungen
Bezugsquelle:
Beuth-Verlag GmbH, Burggrafenstraße 6, 10787 Berlin bzw. VDE-Verlag, Bismarckstraße 33, 10625 Berlin
4. EG-Richtlinien
Bezugsquelle:
Bundesanzeiger Verlagsgesellschaft mbH, Postfach 100534, 50445 Köln
5. Weitere Quellen
World Robotics Report 2013 Industrial Robots; IFR General Secretary / IFR Statistical Department, Lyoner Str. 18, 60528 Frankfurt am Main [17]
Umbreit, Dr. Matthias: Re-Use und Re-Invest - Zweites Leben für Maschinen VMBG-Mitteilungen Heft 4/2009 [18]
ANSI B11 TR 3 RiskAssessment and Risk Reduction [19]
 | ENDE | |