 Für einen individuellen Ausdruck passen Sie bitte die
Für einen individuellen Ausdruck passen Sie bitte dieEinstellungen in der Druckvorschau Ihres Browsers an. Regelwerk, EU 2019, Gefahrgut/Transport - EU Bund

| Für einen individuellen Ausdruck passen Sie bitte die Einstellungen in der Druckvorschau Ihres Browsers an. Regelwerk, EU 2019, Gefahrgut/Transport - EU Bund | |
Durchführungsverordnung (EU) 2019/1213 der Kommission vom 12. Juli 2019 zur näheren Regelung der Sicherstellung einheitlicher Bedingungen für die Verwirklichung der Interoperabilität und Kompatibilität bordeigener Wiegesysteme nach der Richtlinie 96/53/EG des Rates
(Text von Bedeutung für den EWR)
(ABl. L 192 vom 18.07.2019 S. 1, ber. 2020 L 9 S. 75)
Die Europäische Kommission -
gestützt auf den Vertrag über die Arbeitsweise der Europäischen Union,
gestützt auf die Richtlinie 96/53/EG des Rates vom 25. Juli 1996 1, insbesondere auf Artikel 10d Absatz 5,
in Erwägung nachstehender Gründe:
(1) Bordeigene Wiegesysteme sind eine Option, die den Mitgliedstaaten in der Richtlinie 96/53/EG eingeräumt wird, um Kontrollen von möglicherweise überladenen Fahrzeugen oder Fahrzeugkombinationen durchzuführen.
(2) Entsprechend Artikel 10d Absatz 5 Unterabsatz 2 der Richtlinie 96/53/EG muss das bordeigene Wiegesystem, um die Interoperabilität sicherzustellen, in der Lage sein, Gewichtsdaten zu jedem Zeitpunkt über eine durch CEN DSRC-Normen definierte Schnittstelle von einem fahrenden Fahrzeug an die zuständigen Behörden und an die Fahrer zu übermitteln. Es sollten daher technische Vorschriften zur Anpassung des Inhalts der Normen an die Besonderheiten der von bordeigenen Wiegesystemen zu übermittelnden Angaben erlassen werden.
(3) Bordeigene Wiegesysteme können sowohl in Kraftfahrzeuge als auch in Anhänger und Sattelanhänger eingebaut werden. Es muss gewährleistet sein, das die bordeigenen Wiegesysteme der verschiedenen Fahrzeuge einer Fahrzeugkombination miteinander kompatibel sind. Die Kompatibilität sollte durch die Umsetzung der europäischen Normen über kooperative intelligente Verkehrssysteme (K-IVS) gemäß dem delegierten Rechtsakt zur Ergänzung der Richtlinie 2010/40/EU des Europäischen Parlaments und des Rates 2 im Hinblick auf die Einführung und den Betrieb kooperativer intelligenter Verkehrssysteme gewährleistet werden.
(4) Mitgliedstaaten, die den Einbau von bordeigenen Wiegesystemen verbindlich vorschreiben, sollten die Möglichkeit haben, Fahrzeuge oder Fahrzeugkombinationen, bei denen eine Überschreitung des höchstzulässigen Gewichts unmöglich ist (etwa Anhänger oder Sattelanhänger, die besonders für die Beförderung von Flüssigkeiten oder Tieren ausgelegt sind), von dieser Verpflichtung auszunehmen.
(5) Der Einsatz bordeigener Wiegesysteme zur Durchsetzung von Vorschriften könnte Manipulationsversuche zur Folge haben, wie es bei anderen Fahrzeugsystemen, etwa digitalen Fahrtenschreibern oder Emissionsbegrenzungssystemen, geschieht. Um ein angemessenes Maß an Sicherheit gegen Manipulationen zu wahren, muss die Kommunikation zwischen dem Kraftfahrzeug und dem Anhänger oder Sattelanhänger gesichert sein. Bordeigene Wiegesysteme sollten zudem von einer Zertifizierungsstelle, welche vom Verwaltungsausschuss im Rahmen des "Mutual Recognition Agreement of Information Technology Security Evaluation Certificates" (Abkommen zur gegenseitigen Anerkennung von IT-Sicherheitszertifikaten) der Gruppe Hoher Beamter für Informationssicherheit (SOG-IS) anerkannt ist, nach den gemeinsamen Kriterien zertifiziert werden.
(6) Mitgliedstaaten, die sich für den Einbau von bordeigenen Wiegesystemen in das Fahrzeug entscheiden, sollten sicherstellen, dass diese Fahrzeuge Nachprüfungen der betreffenden Systeme in OBW-Werkstätten durchlaufen. Um die einheitliche Umsetzung der Interoperabilitätsvorschriften gemäß dieser Verordnung sicherzustellen, sollten diese Werkstätten gewährleisten, dass das bordeigene Wiegesystem mit angemessener Genauigkeit arbeitet. Bei diesen Werkstätten kann es sich - mit den notwendigen Anpassungen - um Prüfstellen gemäß der Richtlinie 2014/45/EU des Europäischen Parlaments und des Rates 3, Werkstätten gemäß der Verordnung (EU) Nr. 165/2014 des Europäischen Parlaments und des Rates 4 oder sonstige Werkstätten handeln, die den Anforderungen dieser Verordnung entsprechen. Mitgliedstaaten, die nicht für die Einführung bordeigener Wiegesysteme aufgrund von Artikel 10d Absatz 1 der Richtlinie 96/53/EG optieren, sollten nicht verpflichtet sein, solche Werkstätten einzurichten.
(7) Der derzeitige Stand der Technik ermöglicht weder die Umsetzung von CEN DSRC-Normen noch von Normen für K-IVS in bordeigenen Wiegesystemen bis zum 27. Mai 2021. Bordeigene Wiegesysteme sollten stufenweise eingeführt werden, damit die Industrie Produkte entwickeln kann, die den Anforderungen dieser Verordnung und insbesondere ihres Anhangs II sowie bestimmten Anforderungen von Anhang III entsprechen. Mitgliedstaaten, die für den Einbau bordeigener Wiegesysteme optieren, sollten bis zum 27. Mai 2021 die in den Anhängen I und III festgelegten Vorschriften der Stufe 1 anwenden. Für die Anwendung der Vorschriften nach Anhang II sowie der auf Stufe 2 bezogenen Vorschriften der Anhänge I und III sollte eine zusätzliche Frist von drei Jahren gewährt werden.
(8) Die Mitgliedstaaten können besondere Maßnahmen treffen, um vorzuschreiben, dass die Fahrzeuge, die von den zuständigen Behörden überprüft werden müssen, um die Einhaltung der Richtlinie 96/53/EG zu gewährleisten, und die ab dem 27. Mai 2021 in Betrieb genommen und in ihrem Hoheitsgebiet zugelassen werden, mit einem bordeigenen Wiegesystem ausgestattet sind. Fahrzeuge, die vor diesem Zeitpunkt in Betrieb genommen und zugelassen wurden, sollten nicht mit einer solchen Ausrüstung nachgerüstet werden müssen.
(9) Die in dieser Verordnung vorgesehenen Maßnahmen entsprechen der Stellungnahme des Ausschusses für den Straßenverkehr nach Artikel 10i der Richtlinie 96/53/EG
- hat folgende Verordnung erlassen:
Artikel 1 Geltungsbereich
(1) In dieser Verordnung werden einheitliche Bedingungen für die Interoperabilität und Kompatibilität von in Fahrzeugen oder Fahrzeugkombinationen eingebauten bordeigenen Wiegesystemen festgelegt, um die Einhaltung von Artikel 10d Absätze 4 bis 5 der Richtlinie 96/53/EG oder der Vorschriften zum Höchstgewicht im innerstaatlichen Verkehr der Mitgliedstaaten, in denen das Fahrzeug in Betrieb ist, sicherzustellen.
(2) Diese Verordnung gilt nicht für Mitgliedstaaten, die nicht nach Artikel 10d Absatz 1 der Richtlinie 96/53/EG für die Einführung bordeigener Wiegesysteme optiert haben.
(3) Die Mitgliedstaaten können bei Fahrzeugen oder Fahrzeugkombinationen, bei denen aufgrund ihrer Bauart oder der Art der beförderten Ladung ein Überschreiten des zulässigen Höchstgewichts nicht möglich ist, Ausnahmen von der Verpflichtung zum Einbau bordeigener Wiegesysteme gewähren. Diese Ausnahmen dürfen nicht auf der vom Hersteller angegebenen technisch zulässigen Gesamtmasse eines Fahrzeugs im beladenen Zustand beruhen. Die Fahrzeuge oder Fahrzeugkombinationen, für die eine Ausnahme gewährt wird, können weiterhin von den zuständigen Behörden hinsichtlich des zulässigen Höchstgewichts kontrolliert werden.
Artikel 2 Begriffsbestimmungen
Es gelten die folgenden Begriffsbestimmungen:
Artikel 3 Zertifikatsregeln
Die Mitgliedstaaten stellen sicher, dass mindestens eine Wurzelzertifizierungsbehörde, eine Registrierungsbehörde und eine Autorisierungsbehörde vorhanden sind, welche in der Lage sind, für bordeigene Wiegesysteme die Funktionen wahrzunehmen, die in den Zertifikatsregeln für die Einführung und den Betrieb europäischer kooperativer intelligenter Verkehrssysteme (K-IVS) gemäß dem delegierten Akt zur Ergänzung der Richtlinie 2010/40/EU im Hinblick auf die Einführung und den Betrieb kooperativer intelligenter Verkehrssysteme, der auf der Grundlage von Artikel 6 Absatz 1 der genannten Richtlinie erlassen wurde, festgelegt sind.
Artikel 4 Regelmäßige Nachprüfungen
(1) Bordeigene Wiegesysteme sind durch OBW-Werkstätten alle zwei Jahre nach ihrem Einbau in ein Fahrzeug oder eine Fahrzeugkombination nachzuprüfen.
(2) Die regelmäßigen Nachprüfungen werden in Einklang mit Anhang IV durchgeführt.
(3) Die Nachprüfungen dienen dazu, sicherzustellen, dass folgende Anforderungen erfüllt werden:
(4) Nach Abschluss der Nachprüfung erstellt die OBW-Werkstatt einen Bericht über die Nachprüfung des bordeigenen Wiegesystems. Eine Kopie des Berichts wird im Fahrzeug aufbewahrt.
(5) Der Nachprüfungsbericht muss mindestens die folgenden Informationen enthalten:
(6) Nachprüfungsberichte sind ab dem Zeitpunkt der Erstellung des Berichts mindestens zwei Jahre aufzubewahren; die Mitgliedstaaten können jedoch beschließen, dass die Berichte in diesem Zeitraum der zuständigen Behörde zu übermitteln sind. Wenn die Nachprüfungsberichte von den OBW-Werkstätten aufbewahrt werden, gewähren diese im genannten Zeitraum auf Anforderung seitens der zuständigen Behörde Zugang zu den Nachprüfungsberichten und den durchgeführten Kalibrierungen.
Artikel 5 OBW-Werkstätten
(1) Die Mitgliedstaaten erteilen den OBW-Werkstätten, die Nachprüfungen von bordeigenen Wiegesystemen vornehmen dürfen, die Zulassung und führen regelmäßige Audits und Zertifizierungen durch.
(2) Die Mitgliedstaaten stellen sicher, dass OBW-Werkstätten in ihrem Hoheitsgebiet Nachprüfungen von bordeigenen Wiegesystemen zuverlässig durchführen. Hierzu legen sie Verfahren fest, die sie veröffentlichen und die gewährleisten, dass folgende Mindestkriterien erfüllt sind:
(3) Die OBW-Werkstätten sind folgenden Audits zu unterziehen:
(4) Die Mitgliedstaaten treffen geeignete Maßnahmen, um Interessenkonflikte zwischen OBW-Werkstätten und Verkehrsunternehmen zu verhindern. Insbesondere wenn ein hohes Risiko eines Interessenkonflikts besteht, etwa in Fällen, in denen ein Verkehrsunternehmen Eigentümer einer OBW-Werkstatt ist, sind zusätzliche Maßnahmen zu treffen, um sicherzustellen, dass die OBW-Werkstätten die Anforderungen dieses Artikels erfüllen.
(5) Die zuständigen Behörden der Mitgliedstaaten veröffentlichen auf ihrer Website eine aktualisierte Liste von OBW-Werkstätten mit mindestens den folgenden Daten:
(6) Die zuständigen Behörden in den Mitgliedstaaten entziehen OBW-Werkstätten, die ihre Verpflichtungen nach dieser Verordnung nicht einhalten, entweder vorübergehend oder endgültig die Genehmigung.
Artikel 6 Inkrafttreten und Geltungsbeginn
Diese Verordnung tritt am zwanzigsten Tag nach ihrer Veröffentlichung im Amtsblatt der Europäischen Union in Kraft.
Sie gilt ab dem 27. Mai 2021.
Anhang I Nummer 1.4 Buchstabe d, Nummer 5.3 und Nummer 8.1, Anhang II und Anhang III Nummern 3, 8.2 und 10 gelten jedoch ab dem 27. Mai 2024.
Diese Verordnung ist in allen ihren Teilen verbindlich und gilt unmittelbar in jedem Mitgliedstaat.
Brüssel, den 12. Juli 2019
2) Richtlinie 2010/40/EU des Europäischen Parlaments und des Rates vom 7. Juli 2010 zum Rahmen für die Einführung intelligenter Verkehrssysteme im Straßenverkehr und für deren Schnittstellen zu anderen Verkehrsträgern (ABl. L 207 vom 06.08.2010 S. 1).
3) Richtlinie 2014/45/EU des Europäischen Parlaments und des Rates vom 3. April 2014 über die regelmäßige technische Überwachung von Kraftfahrzeugen und Kraftfahrzeuganhängern und zur Aufhebung der Richtlinie 2009/40/EG (ABl. L 127 vom 29.04.2014 S. 51).
4) Verordnung (EU) Nr. 165/2014 des Europäischen Parlaments und des Rates vom 4. Februar 2014 über Fahrtenschreiber im Straßenverkehr, zur Aufhebung der Verordnung (EWG) Nr. 3821/85/EWG des Rates über das Kontrollgerät im Straßenverkehr und zur Änderung der Verordnung (EG) Nr. 561/2006 des Europäischen Parlaments und des Rates zur Harmonisierung bestimmter Sozialvorschriften im Straßenverkehr (ABl. L 60 vom 28.02.2014 S. 1).
5) Durchführungsverordnung (EU) 2016/799 der Kommission vom 18. März 2016 zur Durchführung der Verordnung (EU) Nr. 165/2014 des Europäischen Parlaments und des Rates zur Festlegung der Vorschriften über Bauart, Prüfung, Einbau, Betrieb und Reparatur von Fahrtenschreibern und ihren Komponenten (ABl. L 139 vom 26.05.2016 S. 1).
6) Richtlinie 2014/31/EU des Europäischen Parlaments und des Rates vom 26. Februar 2014 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten betreffend die Bereitstellung nichtselbsttätiger Waagen auf dem Markt (ABl. L 96 vom 29.03.2014 S. 107).
7) Richtlinie 2014/32/EU des Europäischen Parlaments und des Rates vom 26. Februar 2014 zur Harmonisierung der Rechtsvorschriften der Mitgliedstaaten über die Bereitstellung von Messgeräten auf dem Markt (ABl. L 96 vom 29.03.2014 S. 149).
| Allgemeine Bestimmungen für bordeigene Wiegesysteme (on-board weighing equipment, OBW) | Anhang I |
1. Allgemeine Bestimmungen
1.1. Folgende Arten von OBW fallen in den Anwendungsbereich dieser Verordnung:
1.2. Die Durchführung dieser Verordnung erfolgt in zwei Stufen:
1.3. Das OBW berechnet das Gesamtgewicht und, optional, die Achslast.
1.4. Das OBW umfasst Folgendes:
1.5. MVU und TU können jeweils aus einer einzigen Verarbeitungseinheit bestehen oder in verschiedene Einheiten aufgeteilt sein.
2. Kraftfahrzeugeinheit (MVU)
Die MVU führt folgende Funktionen aus:
3. Anhängereinheit (TU)
Die TU führt, falls vorhanden, folgende Funktionen aus:
4. Berechnung des Gewichts
4.1. Bei dynamischen Systemen wird ein erster Gewichtswert spätestens 15 Minuten, nachdem das Fahrzeug begonnen hat, vorwärts zu fahren, berechnet, anschließend wird er in Abständen von höchstens zehn Minuten neu berechnet.
4.2. Bei statischen Systemen werden Gewichtswerte bei eingeschalteter Zündung und stillstehendem Fahrzeug jede Minute berechnet.
4.3. Das Gewicht muss mit einer Auflösung von 100 kg oder besser berechnet werden.
5. Informationsaustausch zwischen dem Kraftfahrzeug und den Anhängern oder Sattelanhängern einer Fahrzeugkombination
5.1. Jeder Anhänger oder Sattelanhänger stellt die von ihm berechneten Gewichtswerte gemäß Nummer 5.2 bzw. 5.3 dem Kraftfahrzeug bereit.
5.2. OBW der Stufe 1
5.2.1. Jedem Anhänger oder Sattelanhänger wird im Rahmen einer dynamischen Adressierung gemäß ISO 11992-2:2014 eine Position innerhalb der Fahrzeugkombination zugewiesen.
5.2.2. Nach durchgeführter Adressierung überträgt die TU jedes Anhängers oder Sattelanhängers die Summe der Achslasten oder die Achslast nach der Beschreibung unter den Nummern 6.5.4.7 und 6.5.5.42 von ISO 11992-2:2014 an die MVU.
5.2.3. Die Nachrichten über die Summe der Achslasten oder die Achslast entsprechen den Vorschriften für die Nachrichtentypen EBS22 und RGE22 in ISO 11992-2:2014.
5.2.4. Format, Routing und allgemeine Parameterbereiche der Nachrichten müssen den Nummern 6.1, 6.3 und 6.4 der Norm ISO 11992-2:2014 entsprechen.
5.3. OBW der Stufe 2
Der Informationsaustausch zwischen dem Kraftfahrzeug und den Anhängern oder Sattelanhängern erfolgt über K-IVS-Stationen gemäß Anhang II.
5.4. Für OBW sowohl der Stufe 1 als auch der Stufe 2 können unterschiedliche Spezifikationen verwendet werden, wenn die OBW-Ausrüstung im Kraftfahrzeug und in den Anhängern oder Sattelanhängern mit ihnen kompatibel ist.
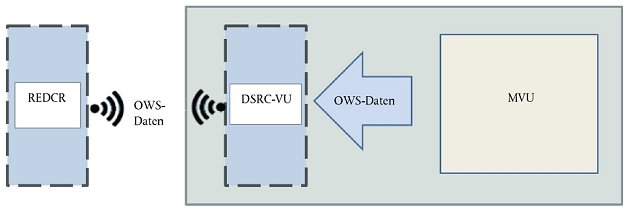
6. Datenvorbereitung und -übertragung an die DSRC-VU
Die Übermittlung der Daten des bordeigenen Wiegesystems (OWS-Daten) an das DSRC-VU-Modul durch die MVU (Stufe 1) bzw. durch die K-IVS-Station im Kraftfahrzeug (Stufe 2) erfolgt im Einklang mit Anhang III.
Abbildung 1
Beispiel für die Anordnung des OBW in einer LKW-Sattelanhänger-Kombination der Stufe 1
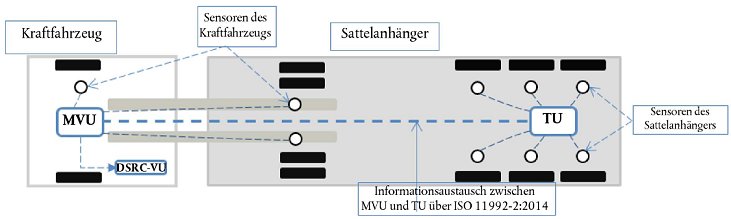
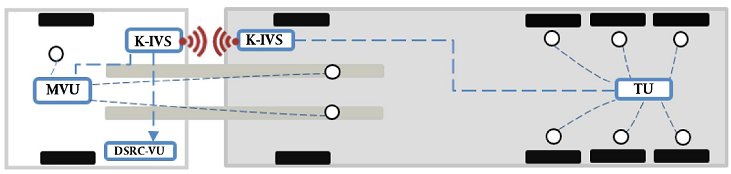
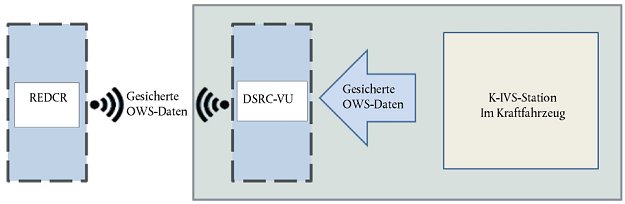
Abbildung 2
Beispiel für die Anordnung des OBW in einer LKW-Sattelanhänger-Kombination der Stufe 2
7. Gewichtsinformationen für den Fahrer
Der Fahrer wird über eine Anzeige mindestens über das Gesamtgewicht informiert.
8. Genauigkeit
8.1. Das berechnete Gewicht muss mit einer Genauigkeit von ± 5 % oder besser ermittelt werden, wenn das Fahrzeug zu mehr als 90 % seines höchstzulässigen Gewichts beladen ist.
8.2. Abweichend von Nummer 8.1 muss die Genauigkeit für OBW der Stufe 1 ± 10 % oder besser betragen.
| Besondere Bestimmungen für OBW der Stufe 2 | Anhang II |
1. Dieser Anhang gilt ausschließlich für OBW der Stufe 2.
2. Das Kraftfahrzeug und die Anhänger oder Sattelanhänger der Fahrzeugkombination, die mit einer Anhängereinheit (TU) ausgerüstet sind, sind mit einer K-IVS-Station auszustatten, die mit der Kraftfahrzeugeinheit (MVU) bzw. der TU des betreffenden Fahrzeugs verbunden ist. Die MVU und die TU können in ihre jeweiligen K-IVS-Stationen integriert sein.
3. Die MVU und die TU übertragen die notwendigen Informationen für die Übermittlung der Nachrichten gemäß Nummer 4.3 dieses Anhangs an die K-IVS-Station, mit der sie verbunden sind.
Abbildung 3
Beispiel eines Nachrichtenflusses in einem OBW der Stufe 2
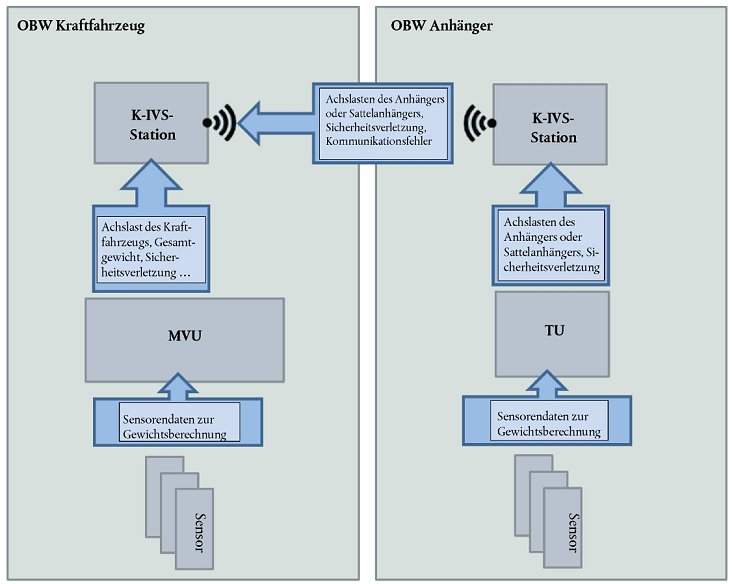
4. Informationsaustausch zwischen Kraftfahrzeug und Anhänger oder Sattelanhänger
4.1. Die Gewichtsinformationen werden zwischen dem Kraftfahrzeug und den gezogenen Anhängern oder Sattelanhängern über eine drahtlose Verbindung zwischen den K-IVS-Stationen des Kraftfahrzeugs und denen der Anhänger oder Sattelanhänger entsprechend den Normen EN 302.663-V1.1.1 mit Ausnahme von Nummer 4.2.1, EN 302.636-4-1-V1.3.1 und EN 302.636-5.1-V2.1.1 sowie entsprechend der von ETSI zu entwickelnden europäischen Norm über die OBW-Anwendung für K-IVS übertragen.
4.2. Die von den K-IVS-Stationen ausgetauschten Nachrichten sind gemäß Nummer 5.1 zu sichern.
4.3. Folgende Informationen sind zwischen den K-IVS-Stationen zu übertragen:
4.4. Das Format der für die Adressierungsphase und für die Übermittlung der Informationen nach Nummer 4.3 notwendigen Nachrichten wird in der Norm über die OBW-Anwendung nach Nummer 4.1 festgelegt.
5. Sicherheitsbestimmungen
5.1. Sichere Kommunikation zwischen K-IVS-Stationen
5.1.1. Die Kommunikation zwischen den K-IVS-Stationen ist gemäß der europäischen Norm ETSI TS 103.097-V1.3.1 und der europäischen Norm über die OBW-Anwendung für K-IVS gemäß Nummer 4.1 zu sichern.
5.1.2. Entsprechend den von der Kommission angenommenen Zertifizierungsregeln für die Einführung und den Betrieb europäischer kooperativer intelligenter Verkehrssysteme erhalten die K-IVS-Stationen:
5.2. Schutz gegen Versuche von Sicherheitsverletzungen
Der Schutz von OBW der Stufe 2 gegen Versuche von Sicherheitsverletzungen ist gemäß der Anlage dieses Anhangs zu implementieren.
| Sicherheitszertifizierung für OBW der Stufe 2 | Anlage zu Anhang II |
1. Die Sicherheitszertifizierung der MVU und der TU erfolgt nach dem Common-Criteria-Zertifizierungsverfahren. In dieser Anlage werden MVU und TU im Folgenden als "OBW-VU" bezeichnet.
2. Die von den OBW-VU mindestens zu erfüllenden Sicherheitsanforderungen werden in einer Sicherheitsvorgabe (Security Target, ST) gemäß dem Common-Criteria-Zertifizierungsverfahren festgelegt.
3. Die ST wird vom Hersteller der zu zertifizierenden Ausrüstung entworfen und von einer staatlichen IT-Sicherheitszertifizierungsstelle genehmigt, welche in der Joint Interpretation Working Group (JIWG) zur Unterstützung der gegenseitigen Anerkennung von Zertifikaten im Rahmen des europäischen Abkommens zur gegenseitigen Anerkennung von IT-Sicherheitszertifikaten (Agreement on Mutual Recognition of Information Technology Security Evaluation Certificates, SOGIS-MRA) organisiert ist.
4. Die Sicherheitszertifizierung des V2X-Gateways und des Hardware-Sicherheitsmoduls der K-IVS-Stationen erfolgt anhand der vom Car2Car Communication Consortium entwickelten Schutzprofile für den V2X-Gateway bzw. das Hardware-Sicherheitsmodul.
5. Für die Sicherheitszertifizierung der OBW-VU gilt die Vertrauenswürdigkeitsstufe EAL2. Wird jedoch der Fahrtenschreiber als MVU verwendet, ist dieser gemäß Anlage 10 zu Anhang IC der Verordnung (EU) 2016/799 auf der Vertrauenswürdigkeitsstufe EAL4, erweitert um die Vertrauenswürdigkeitskomponenten ATE_DPT.2 und AVA_VAN.5, zu zertifizieren.
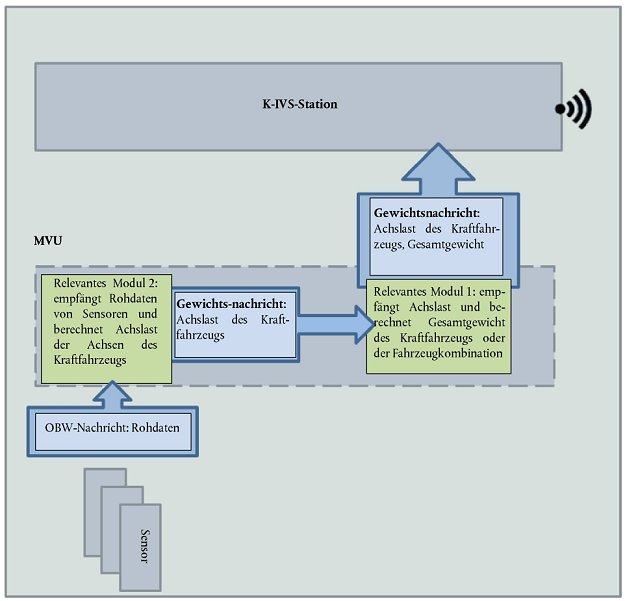
6. Durch die ST zu schützende Objekte
Folgende Objekte sind zu schützen:
Die relevanten OBW-Module sind jene Hardware- und Softwareeinheiten der OBW-VU, die Informationen verarbeiten, die im Fall eines Angriffs zu einer Fehlberechnung des Gesamtgewichts oder der Achslast durch das OBW führen können.
Eine OBW-VU kann aus einem einzigen relevanten Modul bestehen oder sich gemäß Anhang I Nummer 1.5 aus verschiedenen relevanten Modulen zusammensetzen; im letzteren Fall sind diese durch die ST zu identifizieren.
Abbildung 4
Beispiele für OBW-VU-Nachrichten und Gewichtsnachrichten, die in einer aus zwei relevanten Modulen bestehenden MVU zu schützen sind.
7. Gefährdungen, die in der ST zu berücksichtigen sind
In der ST sind folgende Gefährdungen zu berücksichtigen:
8. Für die OBW-VU gelten folgende Sicherheitsvorgaben:
9. Begründung
Tabelle 1 Begründung der Sicherheitsvorgaben
| O.Plausibility_validation | O.OBW-VU_stored_information_protection | O.Notification | |
| T.OBW_message_spoof | X | X | |
| T.OBW_message_tamper | X | X | |
| T.Weight_message_spoof | X | X | |
| T.Weight_message_tamper | X | X | |
| T.Audit_spoof | X | X | |
| T.Audit_tamper | X | X | |
| T.Calibration_tamper | X | X | |
| T.Software_tamper | X | X | |
| T.Stored_data_tamper | X | X |
| Datenvorbereitung und Übertragung von Informationen an das REDCR | Anhang III |
1. In diesem Anhang, der Anhang IC Anlage 14 der Verordnung (EU) 2016/799 (im Folgenden "Anlage 14") ergänzt, werden die Anforderungen für die Vorbereitung und Übertragung von OWS-Daten vom Kraftfahrzeug zum Fernabfragegerät (REDCR) festgelegt.
2. Übertragung von OWS-Daten für OBW der Stufe 1
2.1. Die OWS-Daten sind der Fahrzeugeinheit der dedizierten Nahbereichskommunikation (DSRC-VU) durch die Kraftfahrzeugeinheit (MVU) bereitzustellen.
2.2. Die MVU führt folgende Funktionen aus:
2.2.1. Erstellung der OWS-Daten mit den von der MVU und der Anhängereinheit (TU) empfangenen Daten entsprechend der Struktur unter Nummer 6,
2.2.2. Weitergabe der OWS-Daten an die DSRC-VU zur Weiterleitung an das REDCR.
Abbildung 5
Übermittlung von OWS-Daten von der MVU an das REDCR für OBW der Stufe 1
3. Übertragung von OWS-Daten für OBW der Stufe 2
3.1. Die OWS-Daten werden von der K-IVS-Station im Kraftfahrzeug an die DSRC-VU übertragen.
Abbildung 6
Übermittlung von OWS-Daten von der K-IVS-Station an das REDCR für OBW der Stufe 2
3.2. Die K-IVS-Station im Kraftfahrzeug führt folgende Funktionen aus:
3.2.1. Erstellung der OWS-Daten mit den von der MVU und den K-IVS-Stationen der gezogenen Anhänger oder Sattelanhänger empfangenen Daten entsprechend der Struktur unter Nummer 6,
3.2.2. Sicherung der OWS-Daten gemäß Nummer 8 und
3.2.3. Weitergabe der OWS-Daten an die DSRC-VU zur Weiterleitung an das REDCR.
4. Die Datenübertragung zwischen der DSRC-VU und entweder der MVU (Stufe 1) oder der K-ITS-Station im Kraftfahrzeug (Stufe 2) ist gemäß Anlage 14 Nummer 5.6 zu implementieren, wobei unter der VU je nach Stufe die MVU oder die K-IVS-Station zu verstehen ist.
5. Kommunikation zwischen DSRC-VU und REDCR
5.1. Die Kommunikation zwischen der DSRC-VU und dem REDCR erfolgt, wie in der Richtlinie 96/53/EG des Rates erwähnt, über die Schnittstelle, die durch die CEN DSRC-Normen EN 12253, EN 12795, EN 12834, EN 13372 sowie durch ISO 14906 definiert ist.
5.2. Das Transaktionsprotokoll zum Herunterladen von OWS-Daten über die 5,8-GHz-DSRC-Schnittstellenverbindung ist identisch mit dem, das für die RTM-Daten nach Nummer 5.4.1 der Anlage 14 verwendet wird; der einzige Unterschied besteht darin, dass die Objektkennung für die TARV-Norm auf die Norm ISO 15638 (TARV) Teil 20 (WOB/OWS) verweist.
5.3. Die Befehle für eine OWS-Transaktion sind dieselben wie die, die nach Nummer 5.4.2 der Anlage 14 für eine RTM-Transaktionen zu verwenden sind.
5.4. Die Abfragebefehlssequenz für OWS-Daten ist dieselbe wie die, die nach Nummer 5.4.3 der Anlage 14 für RTM-Daten zu verwenden ist.
5.5. Der Mechanismus der Datenübertragung und die Beschreibung der DSRC-Transaktion sind dieselben wie der Mechanismus und die Beschreibung gemäß Nummer 5.4.6 bzw. 5.4.7 der Anlage 14. Die Vehicle Service Table (Servicetabelle des Fahrzeugs) ist jedoch für die Übermittlung der OWS-Daten anzupassen. Die Rtm-Context Mark wird dementsprechend durch eine Ows-Context Mark ersetzt; diese Objektkennung verweist auf die Norm ISO 15638 (TARV) Teil 20 (WOB/OWS).
5.6. Die Parameter der physischen DSRC-Schnittstelle sind dieselben wie die nach Nummer 5.3 der Anlage 14.
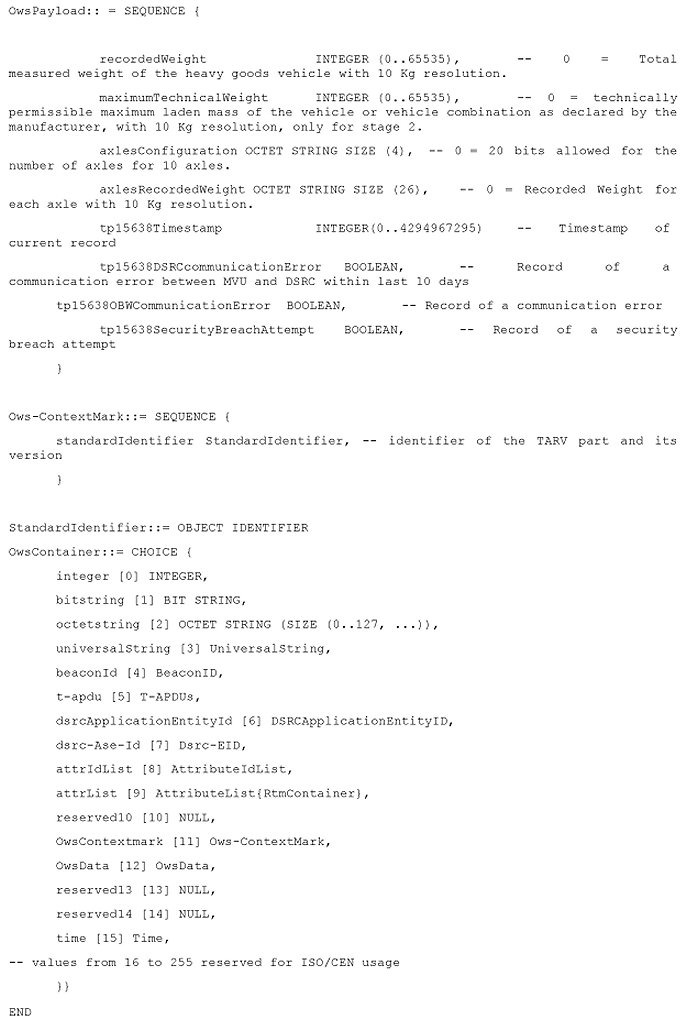
6. Datenstruktur
Das ASN.1-Modul für die DSRC-Daten innerhalb der OWS-Anwendung ist wie folgt definiert:
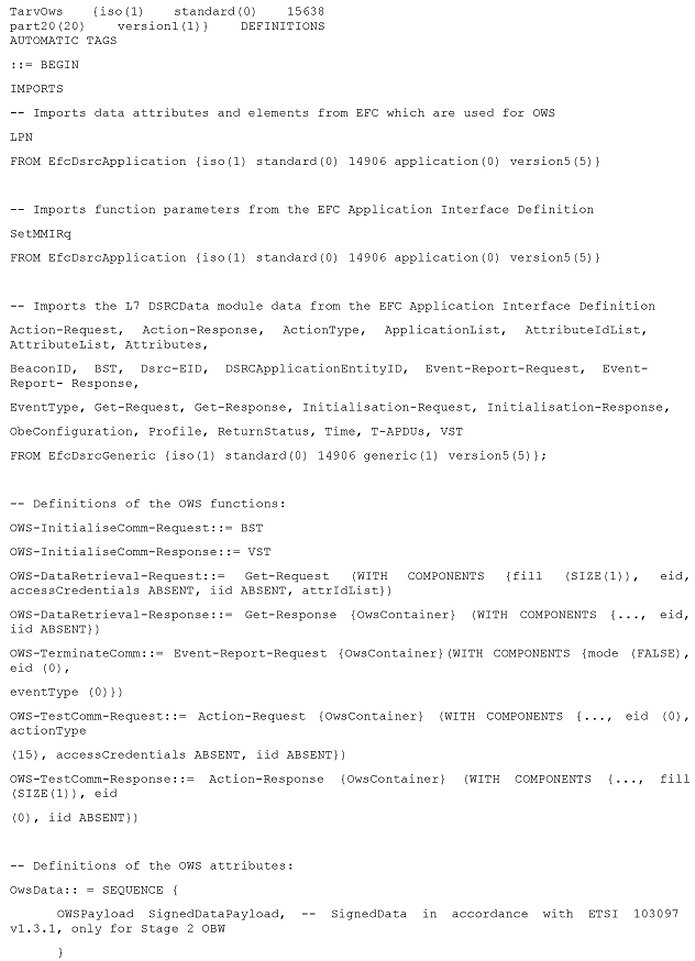
7. Elemente von OWS-Daten, durchgeführte Aktionen und Definitionen:
Die OWS-Daten werden entweder von der MVU (Stufe 1) oder der K-IVS-Station im Kraftfahrzeug (Stufe 2) gemäß der Tabelle 1 bestimmt.
Tabelle 1 Elemente von OWS-Daten, durchgeführte Aktionen und Definitionen:
| Element von OWSData | Vom I-IVS im Kraftfahrzeug durchgeführte Aktion | Bemerkung | ASN.1-Datendefinition |
| OWS1 Gesamtgewicht | Es wird ein Integer-Wert generiert. | Letztes gemessenes Gesamtgewicht | recorded Weight INTEGER (0..65535), |
| OWS2 Technisch zulässige Gesamtmasse im beladenen Zustand | Es wird ein Integer-Wert generiert. | Technisch zulässige Gesamtmasse im beladenen Zustand nach Angabe des Herstellers | Maximum TechnicalWeight INTEGER (0..65535) |
| OWS3 Achsenkonfiguration des Fahrzeugs | Es wird ein Oktettstring Größe 4 generiert. | Achsenkonfiguration | Axles Configuration OCTET STRING SIZE (4), |
| OWS4 Achslast | Es wird ein Oktettstring Größe 26 generiert. | Last pro Achse | Axles RecordedWeight OCTET STRING SIZE (26), |
| OWS5 Zeit des aufgezeichneten Gesamtgewichts | Es wird ein Integer-Wert generiert.
Der Wert für OWS2 wird auf die Zeit der aktuellen Aufzeichnung des Gesamtgewichts eingestellt. | Zeitstempel des aktuellen aufgezeichneten Gewichts | tp15638Timestamp INTEGER (0..4294967295), |
| OWS6 DSRC- Kommunikationsfehler | Es wird ein Boolescher Wert generiert.
Der Variablen tp15638DSRCcommunication Error wird der Wert TRUE zugewiesen, wenn das OBW in den letzten 30 Tagen auf mindestens ein Ereignis des Typs Kommunikationsfehler bei der DSRC-VU gestoßen ist ELSE: Wenn es in den letzten 30 Tagen keine Ereignisse gab, wird der Wert FALSE zugewiesen. | 1 (TRUE) gibt Kommunikationsfehler zwischen dem OBW und der DSRC-VU in den letzten 30 Tagen an. | tp15638DSRCcommunication Error BOOLEAN, |
| OWS7 OBW- Kommunikationsfehler | Es wird ein Boolescher Wert generiert.
Der Variablen tp15638Communication Error wird der Wert TRUE zugewiesen, wenn das OBW in den letzten 30 Tagen auf mindestens ein Ereignis des Typs OBW-Kommunikationsfehler innerhalb des OBW gestoßen ist. ELSE: Wenn es in den letzten 30 Tagen keine Ereignisse gab, wird der Wert FALSE zugewiesen. | 1 (TRUE) gibt Kommunikationsfehler im OBW in den letzten 30 Tagen an. | tp15638OBWCommunication Error BOOLEAN, |
| OWS8 Versuch einer Sicherheitsverletzung | Es wird ein Boolescher Wert generiert.
Der Variablen tp15638Security BreachAttempt wird der Wert TRUE zugewiesen, wenn das OBW in den letzten zwei Jahren mindestens ein Ereignis vom Typ Versuch einer Sicherheitsverletzung aufgezeichnet hat. ELSE: Wenn es in den letzten 2 Jahren keine Versuche von Sicherheitsverletzungen gab, wird der Wert FALSE zugewiesen. | 1 (TRUE) gibt den Versuch einer Sicherheitsverletzung am OBW in den letzten zwei Jahren an. | tp15638Security BreachAttempt BOOLEAN, |
Dabei gilt:
Die Konfiguration wird mit der Bitmaske von 20 Bits definiert (erweitert aus EN ISO 14906).
Eine Bitmaske von 2 Bit entspricht der Konfiguration einer Achse gemäß folgendem Format:
Die letzten sechs Bits sind für zukünftige Zwecke reserviert.
Tabelle 2 Bitverteilung für OWS2
| Achsenzahl | |||||||||||||
| Achsenzahl Zugmaschine | Achsenzahl Anhänger | ||||||||||||
| 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | 00/01/ 10/11 | RFU (6 Bits) |
8. OWS-Datensignatur
8.1. Für Stufe 1 tragen die OWS-Daten keine Signatur; der Klartext der OWS-Daten wird von der MVU an die DSRC-VU übertragen.
8.2. Für Stufe 2 werden die OWS-Daten in der K-IVS-Station des Kraftfahrzeugs mit einer Signatur versehen und von dieser im Einklang mit den folgenden Bestimmungen an die DSRC-VU übertragen:
8.2.1. Die gesicherte Datenstruktur ist gemäß den Nummern 5.1 und 5.2 der Norm ETSI TS 103.097-V1.3.1 aufzubauen.
8.2.2. Für den Typ Signed Data nach Nummer 5.2 von ETSI TS 103.097-V1.3.1 gelten folgende Beschränkungen:
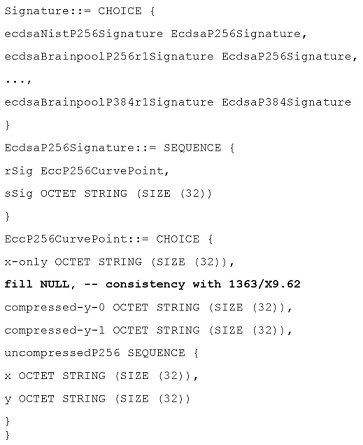
8.2.3. Das ASN.1-Modul für die Typsignatur ist wie folgt definiert:
8.2.4. Das Signaturzertifikat ist das Zertifikat im Berechtigungsticket, das die K-IVS-Station für die Transaktion zwischen ihr und dem REDCR gemäß Nummer 6 der Norm ETSI TS 103.097-V1.3.1 verwendet.
8.2.5. Beim Empfang der Nachricht überprüft das REDCR das Zertifikat und liest die OWS-Datensignatur mithilfe des im Zertifikat enthaltenen öffentlichen Schlüssels.
9. Das Anwendungsprotokoll und die Fehlerbehandlung bei OWS-Daten sind dieselben wie unter den Nummern 5.6.2 und 5.7 der Anlage 14.
10. Für Stufe 2 können OWS-Daten auch über die K-IVS-Station im Kraftfahrzeug anstatt über die DSRC-VU direkt an das REDCR der Durchsetzungsstelle übermittelt werden. In diesem Fall ist das REDCR auch eine K-IVS-Station.
| Regelmäßige Nachprüfungen | Anhang IV |
1. Bordeigene Wiegesysteme (OBW) werden periodisch nachgeprüft, indem das Fahrzeug oder die Fahrzeugkombination mit zertifizierten Wiegevorrichtungen gemäß Artikel 5 Absatz 2 Buchstabe b dieser Verordnung, etwa mobilen Wiegeplatten oder Brückenwaagen, gewogen wird.
2. Folgende Fahrzeuge sind Nachprüfungen zu unterziehen:
3. Anhänger und Sattelanhänger müssen bei der Nachprüfung nach Nummer 2 an ein Kraftfahrzeug angehängt sein. An Kraftfahrzeuge, die zum Ziehen von Sattelanhängern bestimmt sind, muss bei der Nachprüfung ein Sattelanhänger angehängt sein.
4. Die regelmäßige Nachprüfung besteht aus:
Tabelle 3 Durchführungsfolge der regelmäßigen Nachprüfungen
| Prüfung | Dreilasten- prüfung | Einlast- prüfung | Dreilasten- prüfung | Einlast- prüfung | Dreilasten- prüfung | Einlast- prüfung | Dreilasten- prüfung | ... |
| Jahre nach dem Datum der Zulassung des Fahrzeugs | 2 | 4 | 6 | 8 | 10 | 12 | 14 | ... |
5. Dreilastenprüfung
Bei einer Dreilastenprüfung wird das Fahrzeug mit drei verschiedenen Lasten beladen, deren Werte wie folgt zu berechnen sind:
6. Bei der Einlastprüfung wird das Fahrzeug mit einer Last von mindestens 90 % der technisch zulässigen Gesamtmasse des Fahrzeugs im beladenen Zustand beladen.
7. Bei Anhängern und Sattelanhängern mit einer TU und bei Kraftfahrzeugen, die zum Ziehen eines Sattelanhängers bestimmt sind, werden die Lasten nach den Nummern 5 und 6 anhand der technisch zulässigen Gesamtmasse der Fahrzeugkombination im beladenen Zustand berechnet.
8. Besondere Bestimmungen für dynamische OBW
8.1. Überschreitet die technisch zulässige Gesamtmasse des Fahrzeugs oder der Fahrzeugkombination im beladenen Zustand das höchstzulässige Gewicht, sind die Lasten nach den Nummern 5 und 6 anhand des höchstzulässigen Gewichts zu berechnen.
8.2. Um einen Lastwert vom OBW zu erhalten, wird das Fahrzeug oder die Fahrzeugkombination unter spezifischen, in den Leitlinien des Herstellers festzulegenden Bedingungen über eine bestimmte Strecke gefahren.
9. Die Nachprüfung gilt als nicht bestanden, wenn
10. Wird die Nachprüfung nicht bestanden, ist das OBW nach spätestens zwei Monaten einer erneuten Nachprüfung zu unterziehen.
11. Flexibilitätsregelungen bei den regelmäßigen Nachprüfungen:
Um die Durchführung der regelmäßigen Nachprüfungen bei bestimmten Fahrzeugtypen zu erleichtern und um die Auswirkungen der Nachprüfungen auf die regulären Tätigkeiten der Fahrer und Verkehrsunternehmen zu verrin gem. können die Mitgliedstaaten für auf ihrem Hoheitsgebiet zugelassene Fahrzeuge die Anwendung folgender Flexibilitätsregelungen in Erwägung ziehen:
 | ENDE | |