
 Für einen individuellen Ausdruck passen Sie bitte die Für einen individuellen Ausdruck passen Sie bitte dieEinstellungen in der Druckvorschau Ihres Browsers an. ▢ Regelwerk, Gefahrgut/Transport / See / MSC |  |
MSC.1/Rundschreiben 1627 - Vorläufige Richtlinien über die Kriterien der Intaktstabilität der Zweiten Generation
vom 10. Dezember 2020
(VkBl. Nr. 21 vom 15.11.2022 S. 729)
1 Der Schiffssicherheitsausschuss hat auf seiner einhundertzweiten Tagung (4. bis 11. November 2020) in der Erkenntnis, dass leistungsorientierte Kriterien für dynamische Stabilitätsphänomene im Wellengang entwickelt und umgesetzt werden müssen, um ein einheitliches internationales Sicherheitsniveau zu gewährleisten, wie es in Teil A Abschnitt 1.2 des Internationalen Codes über Intaktstabilität von 2008 (Entschließung MSC.267(85) in der jeweils geltenden Fassung) festgelegt ist, die in der Anlage wiedergegebenen Vorläufigen Richtlinien über die Kriterien der Intaktstabilität der Zweiten Generation (Vorläufige Richtlinien) angenommen.
2 Der Ausschuss ist übereingekommen, die Vorläufigen Richtlinien unter Berücksichtigung der bei ihrer Anwendung gewonnenen Erfahrungen bei Entwurf, Konstruktion und Betrieb von Schiffen einer regelmäßigen Überprüfung zu unterziehen.
3 Die Mitgliedsstaaten werden aufgefordert, die in der Anlage enthaltenen Vorläufigen Richtlinien als ergänzende Maßnahmen zu nutzen, wenn die Anforderungen der vorgeschriebenen Kriterien des Teils A des Codes angewendet werden, und allen Beteiligten, insbesondere Schiffbauern, Kapitänen, Schiffseignern, Schiffsbetreibern und Reedereien, zur Kenntnis zu bringen sowie ihre gewonnenen Erfahrungen bei der versuchsweisen Anwendung dieser Vorläufigen Richtlinien der Organisation zu berichten.
***
Vorläufige Richtlinien über die Kriterien der Intaktstabilität der Zweiten Generation
1 Angesichts der großen Vielfalt an Schiffstypen, Schiffsgrößen, Betriebsprofilen und Umgebungsverhältnissen sind die Probleme im Zusammenhang mit dem Versagen der dynamischen Stabilität im Allgemeinen noch nicht gelöst worden. Die Verwaltungen sollten sich der Tatsache bewusst sein, dass einige Schiffe stärker gefährdet sind, bei Wellengang einer kritischen Stabilität ausgesetzt zu sein. Die Verwaltung kann für ein bestimmtes Schiff oder eine bestimmte Gruppe von Schiffen dynamische Stabilitätskriterien anwenden, die zeigen, dass das Sicherheitsniveau eines Schiffes bei Wellengang ausreichend ist.
2 Zu diesem Zweck werden in diesen Richtlinien leistungsbezogene Kriterien für die Bewertung von fünf Versagensmodi der dynamischen Stabilität im Wellengang bereitgestellt, nämlich "Totalausfalls des Schiffes", "Übermäßige Beschleunigung", "Totaler Verlust der Stabilität", "Parametrisches Rollen" und "Wellenreiten/Querschlagen".
3 Die physikalischen Grundlagen und Bewertungsverfahren für diese fünf Versagensmodi der Stabilität waren zum Zeitpunkt der Festlegung der verbindlichen Kriterien für die Intaktstabilität noch nicht wohlverstanden oder entwickelt. Deshalb nutzen die hier dargestellten dynamischen Stabilitätskriterien die jüngsten Fortschritte, indem sie die besten Praktiken und die fortschrittlichsten verfügbaren wissenschaftlichen Instrumente für eine praktische vorschriftsorientierte Anwendung nutzen. Dementsprechend basieren die dynamischen Stabilitätskriterien hauptsächlich auf ersten Grundsätzen und dem neuesten Stand der Technik, im Gegensatz zur überwiegenden Verwendung von Unfallberichten, welche die Grundlage der verbindlichen Kriterien für die Intaktstabilität bilden. Aus diesem Grund können die vorgestellten dynamischen Stabilitätskriterien als Kriterien der Intaktstabilität der zweiten Generation betrachtet werden.
4 Die in diesen Vorläufigen Richtlinien enthaltenen Methodiken beruhen auf allgemeinen grundsätzlichen Ansätzen, die aus der Analyse der Schiffsdynamik abgeleitet wurden. Während des Entwicklungsprozesses war es jedoch auch notwendig, einige Bewertungsverfahren zu vereinfachen und eine halbempirische Anpassung vorzunehmen.
5 Bei der Entwicklung des Rahmens dieser Vorläufigen Richtlinien wurde erkannt, dass eine integrierte Sichtweise, die Entwurfsverfahren und betriebliche Maßnahmen kombiniert, der wirksamste Weg ist, um die Sicherheit im Hinblick auf Unfälle im Zusammenhang mit der Stabilität von Schiffen im Seegang angemessen zu behandeln und kontinuierlich zu verbessern.
6 Deshalb sollen die Kriterien der Intaktstabilität der Zweiten Generation dazu beitragen, ein einheitliches internationales Sicherheitsniveau von Schiffen in Bezug auf Versagensmodi der dynamischen Stabilität im Wellengang zu gewährleisten.
1 ALLGEMEINES
1.1 Einführung
1.1.1 Zweck
1.1.1.1 Der Zweck dieser Richtlinien ist, die Anwendung der Kriterien der Intaktstabilität der zweiten Generation für die Bewertung der Versagensmodi der dynamischen Stabilität im Wellengang, wie es in Abschnitt 1.2 des Teils A des Codes über Intaktstabilität von 2008 (IS-Code 2008) gefordert wird, zu ermöglichen. Diese Versagensmodi der dynamischen Stabilität sind folgende: Totalausfall des Schiffes, Übermäßige Beschleunigung, Totaler Verlust der Stabilität, Parametrisches Rollen und Wellenreiten/Querschlagen. In diesem Sinne ist das übergeordnete Ziel, die neueste Technologie und den neuesten Wissensstand zu Schiffsdynamiken anzuwenden, um für Schiffskonstrukteure eine Anleitung über Versagensmodi der dynamischen Stabilität bereitzustellen und eine betriebliche Anleitung für Kapitäne zur Verfügung zu stellen. Dies wird unternommen, um das Sicherheitsniveau eines Schiffes über die vorgeschriebenen Kriterien der Intaktstabilität hinaus weiter zu verbessern.
1.1.1.2 Der Hauptzweck dieser Kriterien ist, die Anwendung der neuesten numerischen Simulationsverfahren für die Beurteilung des Sicherheitsniveaus eines Schiffes aus der Sichtweise der Intaktstabilität zu ermöglichen. Durch den Einsatz solcher Verfahren für die Simulation des dynamischen Fahrverhaltens des Schiffes in einem beliebigen Seegang kann das Sicherheitsniveau eines Schiffes mit einem probabilistischen Maßstab abgeschätzt werden. Diese Vorgehensweise wird hiermit direkte Stabilitätsbewertung genannt. Die Anwendung solcher Verfahren auf alle neuen Schiffe, die dem IS-Code 2008 unterliegen, ist jedoch wegen der Begrenzung des Personals und der Einrichtungen, die für eine experimentelle Validierung der numerischen Berechnungswerkzeuge erforderlich sind, praktisch nicht durchführbar. Deshalb kann die Anfälligkeit eines Schiffes unter Verwendung einfacherer Anfälligkeitskriterien oder einer umfangreicheren direkten Stabilitätsbewertung festgestellt werden. Die Anleitung für Anfälligkeitskriterien und die Anleitung für die direkte Stabilitätsbewertung sind in Kapitel 2 bzw. Kapitel 3 der Vorläufigen Richtlinien enthalten.
1.1.1.3 Es wird darauf hingewiesen, dass die Einhaltung der Kriterien, die in Teil A des IS-Codes 2008 enthalten sind, gute Seemannschaft, sachgerechte Handhabung des Schiffes und sachgerechter Betrieb die mögliche Gefahr eines übermäßigen Rollens, einer übermäßigen Querbeschleunigung oder eines Kenterns aufgrund eines Versagensmodus der dynamischen Stabilität vermeiden können. In Anbetracht dieser Tatsache können für ein Schiff betriebliche Maßnahmen als Alternative für die Anfälligkeitskriterien oder die direkte Stabilitätsbewertung vorgesehen sein. Für diesen Zweck sind Richtlinien für betriebliche Maßnahmen in Kapitel 4 der Vorläufigen Richtlinien vorgesehen. Während die natürliche Reihenfolge der Anwendung von den Anfälligkeitskriterien bis zu der direkten Stabilitätsbewertung und den betrieblichen Maßnahmen führt, sind alle diese Alternativen im regulatorischen Sinne gleichwertig, und jede von ihnen kann unabhängig von den anderen, so wie es am geeignetsten bei dem jeweiligen Entwurf ist, angewendet werden.
1.1.2 Rahmenbedingungen
1.1.2.1 Für den Zweck dieser Rahmenbedingungen gelten die folgenden Begriffsbestimmungen:
- Kriterium ist ein Verfahren, ein Algorithmus oder eine Formel, die für die Bewertung der Wahrscheinlichkeit eines Stabilitätsversagens angewendet werden;
- Standard ist eine Bereichsgrenze, die eine akzeptable und eine nicht akzeptable Wahrscheinlichkeit eines Stabilitätsversagens voneinander trennt; und
- Vorschrift (oder Regel) ist eine Angabe einer Beziehung zwischen einem Standard und einem durch ein Kriterium ermittelten Wert.
1.1.2.2 Die Kriterien der Intaktstabilität der zweiten Generation sind Hilfsmittel zur Beurteilung der Wahrscheinlichkeit des Versagens der Intaktstabilität. Das Versagen der Intaktstabilität ist ein Vorgang, der das Auftreten sehr großer Rollwinkel (Krängung, Schlagseite) oder übermäßige Beschleunigung fester/harter Gegenstände umfasst, die ein Kentern zu Folge haben können oder den normalen Betrieb des Schiffes beeinträchtigen und für Besatzung, Fahrgäste, Ladung und Schiffsausrüstung gefährlich sein könnten. Es sind drei Untergruppen des Versagens der Intaktstabilität berücksichtigt:
- Krängung/Schlagseite, die eine festgelegte Grenze überschreitet;
- Rollwinkel, die eine festgelegte Grenze überschreiten; und
- Querbeschleunigungen, die eine festgelegte Grenze überschreiten.
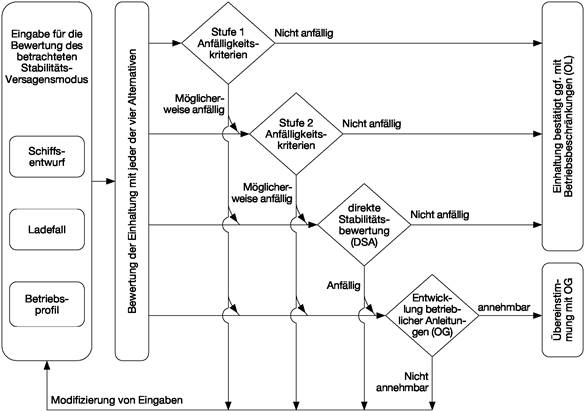
1.1.3 Anwendungslogik
1.1.3.1 Die Anwendungslogik ist in Abbildung 1.1.3 zusammengefasst. Obwohl der Anwender durch eine folgegebundene Logik der Vorläufigen Richtlinien geführt werden kann (siehe Absatz 1.1.3.2), ist es auch annehmbar, dass der Anwender eine alternative Entwurfsbewertung oder die Option einer betrieblichen Maßnahme (siehe Absatz 1.1.1.3) anwendet. Beispielsweise möchte ein Anwender möglicherweise sofort mit der Anwendung der Verfahren für eine direkte Stabilitätsbewertung ohne Durchlaufen der Stufen 1 und 2 der Anfälligkeitskriterien oder die Entwicklung betrieblicher Maßnahmen ohne Durchführung einer Entwurfsbewertung beginnen.
1.1.3.2 Eine folgegebundene Anwendungslogik kann wie folgt zusammengefasst werden:
Als einfachste Option werden die Anfälligkeitskriterien in zwei Stufen dargestellt: Stufe 1 und Stufe 2. Bei der Bewertung der fünf Versagensmodi der Stabilität ist mit der Anwendung dieser Stufen zu beginnen. Stufe 1 ist eine erste Prüfung, und danach, wenn das Schiff bei einem bestimmten Ladefall als nicht anfällig für den geprüften Versagensmodus eingestuft wird, kann die Bewertung für diesen Versagensmodus abgeschlossen werden; andernfalls würde der Entwurf in Stufe 2 übergehen. Wenn das Schiff bei einem bestimmten Ladefall als nicht anfällig für den geprüften Versagensmodus in Stufe 2 bewertet wird, wäre die Bewertung abgeschlossen; andernfalls würde der Entwurf zur Anwendung einer direkten Stabilitätsbewertung, zur Anwendung von Betriebsbeschränkungen, zur Überarbeitung des Entwurfs des Schiffes oder zum Verwerfen des Ladefalls übergehen. Wenn das Schiff bei einem bestimmten Ladefall in Bezug auf die direkten Stabilitätsbewertungsverfahren für nicht annehmbar befunden wird, so ist die Logik, dass der Entwurf dann zur Anwendung betrieblicher Maßnahmen oder betrieblicher Anleitungen, zur Überarbeitung des Entwurfs oder zum Verwerfen des Ladefalls übergehen würde.
Abbildung 1.1.3 - Vereinfachtes Schema der Anwendungsstruktur der Kriterien der Intaktstabilität der zweiten Generation.
Für die konkreten Anwendungseinzelheiten wird auf den Wortlaut dieser Vorläufigen Richtlinien verwiesen.
1.1.4 Prüfung
1.1.4.1 Die Kriterien der Intaktstabilität der zweiten Generation sind im Hinblick auf eine zukünftige Eingliederung in den IS-Code 2008 entwickelt worden. Sie benötigen allerdings eine Überprüfung, bevor sie als vorgeschriebene Kriterien angewendet werden. Dies liegt daran, dass die neuen Kriterien für die verschiedenen Versagensmodi der Stabilität im gleichen Maße aussagekräftig sind.
Die im Entwicklungsprozess erzielten Ergebnisse zeigen insbesondere, dass:
- die Anfälligkeitskriterien der Stufen 1 und 2 für den Versagensmodus "Totalausfall des Schiffes" manchmal unverlässliche Ergebnisse liefern, d. h., Stufe 2 kann für einige Schiffe strenger sein als Stufe 1;
- die Kriterien für die Anfälligkeit für übermäßige Beschleunigung möglicherweise weitere Verfeinerungen erfordern;
- das Anfälligkeitskriterium der Stufe 2 für den totalen Verlust der Stabilität sehr konservative Ergebnisse für Schiffe mit geringem Freibord liefert; daher sollten die Ergebnisse der Prüfung für solche Schiffe mit Vorsicht behandelt werden; und
- die Anfälligkeitskriterien der Stufe 1 und der Stufe 2 für parametrisches Rollen und Wellenreiten/Querschlagen einen ausreichenden wissenschaftlichen Hintergrund und praktikable Verfahren für eine vorgeschriebene Anwendung haben.
1.1.4.2 Daher sind diese Kriterien in dieser Phase versuchsweise zu verwenden. Die Verwendung dieser Kriterien und die anschließende Berichterstattung sind notwendig, um Erfahrungen zu sammeln und somit die Einführung dieses Ansatzes in die Analyse der Intaktstabilität zu ermöglichen. Es wird auch dringend empfohlen, die Kriterien auf bereits in Betrieb befindliche Schiffe anzuwenden und die Ergebnisse mit den Betriebserfahrungen zu vergleichen.
1.1.5 Rückmeldung
1.1.5.1 Die Methodik bei den Kriterien der Intaktstabilität der zweiten Generation ist unter Verwendung der neuesten Technologien und der wissenschaftlichen Erkenntnisse zur Bewertung der Schiffsdynamiken im Wellengang entwickelt worden. Die Methodik ist an einer Reihe von Beispielschiffen überprüft worden, und zu diesem Zweck sind diese Vorläufigen Richtlinien dafür vorgesehen, Daten und Rückmeldungen für eine große Anzahl von Schiffen zu liefern.
1.1.5.2 Diese Richtlinien sind als "Vorläufige Richtlinien" herausgegeben worden, um Erfahrungen mit ihrer Anwendung zu sammeln. Sie sind zu überprüfen, um künftige Änderungen auf der Grundlage der gewonnenen Erfahrungen zu ermöglichen.
1.1.5.3 Die Mitgliedstaaten und internationalen Organisationen werden aufgefordert, Informationen, Feststellungen, Vorschläge, Kommentare und Empfehlungen auf der Grundlage der praktischen Erfahrungen, die bei der Anwendung dieser Vorläufigen Richtlinien gemacht wurden, zu übermitteln. Zur Unterstützung des Ziels, aussagekräftige Kriterien für eine vorgeschriebene Anwendung zu erhalten, werden Vorschläge für Alternativen und/oder Verfeinerungen der in den Vorläufigen Richtlinien enthaltenen Komponenten der Kriterien erbeten. In den Vorschlägen sind die Ergebnisse mit den in den Vorläufigen Richtlinien enthaltenen Komponenten der Kriterien zu vergleichen.
1.1.5.4 Anhand solcher Rückmeldungen nicht nur zu den technischen Ergebnissen, sondern auch zu deren Verwendbarkeit und Deutlichkeit, wird die Organisation anschließend in der Lage sein, die Kriterien der Intaktstabilität der zweiten Generation erforderlichenfalls zu verfeinern.
1.1.6 Zusammenhang mit vorgeschriebenen Kriterien
1.1.6.1 Diese Vorläufigen Richtlinien sind nicht dafür vorgesehen, an Stelle der im IS-Code 2008 enthaltenen vorgeschriebenen Intaktstabilität-Kriterien angewendet zu werden. Sie sind zur Verwendung als Leitfaden für Schiffskonstrukteure vorgesehen, die Aspekte der Schiffsstabilität zu beurteilen, die durch die vorgeschriebenen Kriterien nicht ausreichend abgedeckt sind, und um eine betriebliche Anleitung für Kapitäne zur Verfügung zu stellen. Deshalb sind sie als eine ergänzende Zusammenstellung von Stabilitätsprüfverfahren anzusehen.
1.1.7 Anwendungshinweise
1.1.7.1 Diese Vorläufigen Richtlinien sind dafür vorgesehen, auf Schiffe angewendet zu werden, die auch dem IS-Code 2008 unterliegen.
1.1.7.2 Diese Vorläufigen Richtlinien sind nicht speziell für Mehrrumpffahrzeuge entwickelt worden. Ferner sind für Schiffe mit einem ausgedehnten niedrigliegenden Wetterdeck zusätzliche Anwendungsvorschriften in den relevanten Kapiteln vorgesehen.
1.2 Begriffsbestimmungen
1.2.1 Ladefall ist im Zusammenhang mit diesen Vorläufigen Richtlinien durch den mittleren Tiefgang d, den Trimmwinkel θ, die metazentrische Höhe GM und das Massen-Trägheitsmoment Ixx (oder Eigen-Rollperiode Tr), Iyy und Izz definiert.
1.2.2 Voll abgeladen vor dem Auslaufen bedeutet der in Abschnitt 3.4.1 des Teils B des IS-Codes 2008 definierte Ladefall.
1.2.3 Seegang ist der stationäre Zustand der freien Wasseroberfläche und des Windes an einem bestimmten Ort und zu einem bestimmten Zeitpunkt, der in diesen Vorläufigen Richtlinien durch die signifikante Wellenhöhe HS, die mittlere Nulldurchgangs-Wellenperiode TZ, die mittlere Wellenrichtung μ, das Spektrum der Wellenhubenergie Szz und die mittlere Windgeschwindigkeit, Böigkeitsmerkmale und Richtung des Windes beschrieben ist. Für kombinierte Windsee und Seegang können die signifikante Wellenhöhe, die mittlere Nulldurchgangs-Wellenperiode und die mittlere Wellenrichtung für jedes der zwei Wellensysteme einzeln definiert werden.
1.2.4 Fahrtzustand ist eine kurze Bezeichnung für die Kombination der Schiffs-Vorausgeschwindigkeit Vs und des Steuerkurses in Bezug auf die mittlere Wellenrichtung μ.
1.2.5 Angenommene Situation ist ein Zustand des Schiffes, der sich auf den Fahrtzustand bezieht, der mit dem Seegang kombiniert ist. Es wird also eine Situation durch die Schiffs-Vorausgeschwindigkeit v0, die mittlere Wellenrichtung μ, die signifikante Wellenhöhe HS und die mittlere Nulldurchgangs-Wellenperiode Tz sowie Richtung und Böigkeitsmerkmale des Windes definiert.
1.2.6 Entwurfssituation ist eine angenommene Situation, die für einen bestimmten Versagensmodus der Stabilität repräsentativ ist.
1.2.7 Tabelle der Wellenstreuung ist eine Tabelle, welche die Wahrscheinlichkeiten für jeden Bereich des Seegangs enthält, die in dem betrachteten Einsatzgebiet oder der betrachteten Fahrtroute angetroffen werden. In diesen Vorläufigen Richtlinien werden die Wahrscheinlichkeiten, die in einer Tabelle der Wellenstreuung enthalten sind, definiert, um sie einheitlich zusammenzufassen.
1.2.8 Tabelle der begrenzten Wellenstreuung ist eine Tabelle, die man aus der Tabelle der vollständigen Wellenstreuung durch das Entfernen aller Bereiche des Seegangs mit den signifikanten Wellenhöhen oberhalb einer bestimmten Grenze erhält.
1.2.9 Einsatzgebiet und Fahrtroute sind die geographischen Bereiche, die für den Einsatz des Schiffes festgelegt sind. Im Zusammenhang mit diesen Vorläufigen Richtlinien wird das Einsatzgebiet oder die Fahrtroute durch die Langzeitstatistiken für Wellen (Tabelle der Wellenstreuung) und Wind vorgegeben.
1.2.10 Nominale Vorausgeschwindigkeit des Schiffes bedeutet die Schiffsgeschwindigkeit in ruhigem Wasser unter Einfluss einer vorgegebenen Einstellung des Schiffsantriebs.
1.2.11 Höchste Dienstgeschwindigkeit bedeutet die höchste Dienstgeschwindigkeit voraus, wie es in Regel II-1/3.14 SOLAS definiert ist.
1.2.12 Entwurfsbewertung entspricht der Anwendung der Anfälligkeitskriterien entsprechend Kapitel 2 oder einer direkten Bewertung der Stabilität entsprechend Kapitel 3 dieser Vorläufigen Richtlinien oder eine Kombination von beiden Kapiteln.
1.2.13 Betriebliche Maßnahmen bedeutet betriebliche Beschränkungen oder betriebliche Anleitung.
1.2.14 Richtlinien über die Anfälligkeitsbewertung bedeutet der Inhalt des Kapitels 2 dieser Vorläufigen Richtlinien.
1.2.15 Richtlinien für die direkte Stabilitätsbewertung bedeutet der Inhalt des Kapitels 3 dieser Vorläufigen Richtlinien.
1.2.16 Richtlinien für betriebliche Maßnahmen bedeutet der Inhalt des Kapitels 4 dieser Vorläufigen Richtlinien.
1.2.17 IS-Code 2008 bedeutet der Internationale Code über Intaktstabilität von 2008 in der jeweils geltenden Fassung.
1.2.18 Mittlere 3-Stunden Maximalamplitude bedeutet der Durchschnittswert von mehreren maximalen Amplituden, von denen jede über einen Expositionszeitraum von 3 Stunden bestimmt wird.
1.3 Fachausdrücke
1.3.1 Die in diesen Vorläufigen Richtlinien verwendeten generellen Fachausdrücke sind in den Absätzen 1.3.2, 1.3.3, 1.3.4 und 1.3.5 aufgeführt. Fachausdrücke, die einen bestimmten Abschnitt betreffen, sind an der betreffenden Stelle definiert und gelten vorrangig vor den allgemeinen Fachausdrücken, die hier angegeben sind. Sofern nicht anderweitig angegeben, ist auf die im IS-Code 2008 verwendeten Fachausdrücke zu verweisen.
1.3.2 Generelle Schiffsmerkmale
| L | = | Länge des Schiffes, wie Absatz 2.12 der Einleitung des IS-Codes 2008 definiert |
| B | = | Breite auf Mallkante des Schiffes (m) |
| Bwl | = | Breite auf Mallkante in der Wasserlinie (m) |
| D | = | Seitenhöhe auf Mallkante, wie im IS-Code 2008 definiert (m) |
| Vs | = | Dienstgeschwindigkeit (m/s) |
| v0 | = | Vorausgeschwindigkeit (m/s) |
| Fn | = | Froude-Zahl = Vs / √Lg |
| Ak | = | Gesamtfläche der Schlingerkiele (keine anderen Schiffsanhänge) (m2) |
 | = | Volumen der Verdrängung bis zur Wasserlinie, die D entspricht, ohne Trimm (m3) |
| Dp | = | Propellerdurchmesser (m) |
| xi | = | Entfernung in Längsrichtung vom hinteren Lot bis zu einer Position i (m), nach vorn positiv ausgedrückt |
1.3.3 Konstanten
| g | = | Erdbeschleunigung, mit 9,81 (m/s2) angenommen |
| ρ | = | Dichte des Salzwassers, mit 1025 (kg/ m3) angenommen |
| ρair | = | Dichte der Luft, mit 1,222 (kg/m3) angenommen |
1.3.4 Ladefall-Merkmale
| dfull | = | Tiefgang entsprechend dem voll abgeladenen Schiff vor dem Auslaufen in ruhigem Wasser (m) |
| CB,full | = | Völligkeitsgrad des voll abgeladenen Schiffes vor dem Auslaufen in ruhigem Wasser |
| Cm,full | = | Hauptspant-Koeffizient des voll abgeladenen Schiffes vor dem Auslaufen in ruhigem Wasser |
| d | = | mittlerer Tiefgang, d. h. der Tiefgang mittschiffs, der dem betrachteten Ladefall in ruhigem Wasser entspricht (m) |
| LWL | = | Länge des Schiffes in der Wasserlinie, die dem betrachteten Ladefall entspricht (m) |
| KB | = | Höhe des Formschwerpunktes über der Basislinie, die dem betrachteten Ladefall entspricht (m) |
| KG | = | Höhe des Gewichtsschwerpunktes über der Basislinie, die dem betrachteten Ladefall entspricht (m) |
 | = | Verdrängungsvolumen, das dem betrachteten Ladefall entspricht (m3) |
| CB | = | Völligkeitsgrad, der dem betrachteten Ladefall entspricht (-) |
| Δ | = | Deplacement (t) |
| AW | = | Wasserlinienfläche beim Tiefgang, der d gleich ist (m2) |
| IT | = | Breitenträgheitsmoment der Wasserlinienfläche (m4) |
| Ixx | = | Roll-Trägheitsmoment (in der Luft - dry roll) (t m2) |
| Iyy | = | Stampf-Trägheitsmoment (in der Luft - dry pitch) (t m2) |
| Izz | = | Gier-Trägheitsmoment (in der Luft - dry yaw) (t m2) |
| m | = | Masse des Schiffes (t) |
| kxx | = | Roll-Trägheitsradius (in der Luft - dry roll) um die x-Achse = √(Ixx/m) (m) |
| kyy | = | Stampf-Trägheitsradius (in der Luft - dry pitch) um die y-Achse = √(Iyy/m) (m) |
| kzz | = | Gier-Trägheitsradius (in der Luft - dry yaw) um die z-Achse = √(Izz/m) (m) |
| GM | = | metazentrische Höhe des Ladefalls in ruhigem Wasser (m) mit bzw. ohne Korrektur für die Auswirkung freier Oberflächen |
| AL | = | projizierte Lateralfläche des Schiffes und der Decksladung oberhalb der Wasserlinie (m2) |
| Z | = | senkrechter Abstand vom Mittelpunkt von AL bis zum Mittelpunkt der Unterwasserlateralfläche oder näherungsweise bis zu einem Punkt auf der Hälfte des mittleren Tiefgangs d (m) |
| Tr | = | lineare natürliche Rollperiode in ruhigem Wasser (s) |
| ωr | = | Eigen-Rollfrequenz = 2π / Tr (rad/s) |
| φ | = | Rollwinkel, Krängungswinkel oder Neigungswinkel (rad oder Grad) |
| θ | = | Stampfwinkel oder Trimmwinkel (rad oder Grad) |
| ψ | = | Gierwinkel, Steuerkurs- oder Kurswinkel (rad oder Grad) |
| φS | = | stabiler Krängungswinkel unter Einwirkung eines gleichmäßigen Krängungsmoments, berechnet als erster Schnittpunkt zwischen der Kurve der aufrichtenden Hebelarme (GZ-Kurve) und der Kurve der krängenden Hebelarme (rad oder Grad) |
| φV | = | Kenterwinkel. Bei Vorhandensein eines Krängungsmoments ist der Winkel als zweiter Schnittpunkt zwischen der Kurve der aufrichtenden Hebelarme (GZ-Kurve) und der angewandten Kurve der krängenden Hebelarme (rad oder Grad) zu berechnen |
1.3.5 Merkmale der Umgebungsverhältnisse
| λ | = | Wellenlänge (m) |
| H | = | Wellenhöhe (m) |
| HS | = | signifikante Wellenhöhe für die betrachteten kurzzeitigen Umgebungsverhältnisse (m) |
| s | = | Wellensteilheit = H / λ |
| TZ | = | mittlere Nulldurchgangsperiode für die betrachteten kurzzeitigen Umgebungsverhältnisse |
| Tp | = | Wellenperiode entsprechend des Scheitelwertes eines Spektrums für die betrachteten kurzzeitigen Umgebungsverhältnisse (s) |
| μ | = | mittlere Wellenrichtung in Bezug auf die Mittelebene des Schiffes (Grad) |
| Szz | = | Spektrum der Wellenhubenergie (m2/ (rad/s)) |
| ω | = | Kreisfrequenz (rad/s) |
| k | = | Wellenzahl = 2π / λ (rad/m) |
1.3.6 Sonstige Parameter
| Ns | = | Anzahl von Simulationen |
| fs | = | gemeinsame Seegangs-Wahrscheinlichkeitsdichte (Wahrscheinlichkeit der Seegänge je Einheitenbereich der signifikanten Wellenhöhen und mittleren Nulldurchgangsperioden) (1/m · s) |
2 Richtlinien über Anfälligkeitskriterien
2.1 Vorwort
Wie in Abschnitt 1.2 Teil A des IS-Codes 2008 beschrieben, kann die Verwaltung für ein bestimmtes Schiff oder eine Gruppe von Schiffen Kriterien anwenden, die zeigen, dass die Sicherheit des Schiffes im Wellengang ausreichend ist. Zu diesem Zweck sind die Kriterien für die Versagensmodi der dynamischen Stabilität in Wellengang entwickelt worden, die sich auf die Versagensmodi "Totalausfalls des Schiffes", "Übermäßige Beschleunigung", "Totaler Verlust der Stabilität", "Parametrisches Rollen" und "Wellenreiten/Querschlagen" beziehen. Diese Kriterien sind zu verwenden, um ein einheitliches internationales Sicherheitsniveau von Schiffen in Bezug auf diese Versagensmodi zu gewährleisten.
2.2 Bewertung der Anfälligkeit des Schiffes für den Versagensmodus "Totalausfall des Schiffes"
2.2.1 Anwendung
2.2.1.1 Die nachstehenden Bestimmungen gelten für alle Schiffe, mit Ausnahme von Schiffen mit einem ausgedehnten, niedrigen Wetterdeck. 1
2.2.1.2 Für jeden Ladefall:
- gilt ein Schiff, das den in den Kriterien des Abschnitts 2.2.2 enthaltenen Standard erfüllt, als nicht anfällig für den Versagensmodus "Totalausfall des Schiffes"; oder
- soll ein Schiff, das den in den Kriterien des Abschnitts 2.2.2 enthaltenen Standard nicht erfüllt, durch Anwendung der in Abschnitts 2.2.3 enthaltenen Kriterien einer eingehenderen Bewertung der Anfälligkeit für den Versagensmodus "Totalausfall des Schiffes" unterzogen werden.
2.2.1.3 Alternativ zu den in Abschnitt 2.2.2 oder Abschnitt 2.2.3 enthaltenen Kriterien kann ein Schiff für jeden Ladefall entweder:
- einer direkten Stabilitätsbewertung für den Versagensmodus "Totalausfall des Schiffes", die entsprechend den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 durchgeführt wird, unterzogen werden; oder
- Betriebsbeschränkungen in Bezug auf das Einsatzgebiet oder die Fahrtroute und die Jahreszeit, die in Übereinstimmung mit den Richtlinien für betriebliche Maßnahmen in Kapitel 4 entwickelt wurden, unterzogen werden.
2.2.1.4 Eine ausführliche Bewertung der Anfälligkeit der Stufe 2 entsprechend den in Abschnitt 2.2.3 enthaltenen Kriterien kann durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.2.2 durchzuführen. Gleichermaßen kann eine detaillierte direkte Stabilitätsbewertung entsprechend Absatz 2.2.1.3.1 durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.2.2 oder Abschnitt 2.2.3 durchzuführen.
2.2.1.5 Angaben zur Stabilitätsgrenze für die Bestimmung der sicheren Bereiche als Funktionen von GM, Tiefgang und Trimm sind auf der Grundlage von Matrixberechnungen entsprechend den in den Abschnitten 2.2.2 oder 2.2.3 enthaltenen Kriterien und gegebenenfalls einer direkten Stabilitätsbewertung entsprechend den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 zu machen. Gegebenenfalls sind in den Angaben zur Stabilitätsgrenze für die Bestimmung der sicheren Bereiche Betriebsbeschränkungen in Bezug auf bestimmte Einsatzgebiete oder Fahrtrouten und bestimmte Jahreszeiten entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 zu berücksichtigen.
2.2.1.6 Die bei der Bewertung zu verwendenden Referenz-Umgebungsverhältnisse können entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 abgeändert werden, wenn Betriebsbeschränkungen eingeführt werden, die den Betrieb in bestimmten Einsatzgebieten oder auf bestimmten Fahrtrouten und gegebenenfalls zu bestimmten Jahreszeiten ermöglichen.
2.2.1.7 Die Einflüsse freier Oberflächen sollen berücksichtigt werden, wie es in Kapitel 3 des Teils B des IS-Codes 2008 empfohlen wird.
2.2.2 Anfälligkeitskriterium der Stufe 1 für den Versagensmodus "Totalausfall des Schiffes"
2.2.2.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Totalausfall des Schiffes" angesehen, wenn seine Fähigkeit, dem gemeinsamen Einfluss von Seitenwind und Rollen zu widerstehen, unter Bezugnahme auf die Abbildung 2.2.2.1 wie folgt nachgewiesen wird:
- Das Schiff ist einem stetigen, rechtwinklig zur Schiffsmittelachse wirkenden Winddruck ausgesetzt, der einen konstanten Winddruck-Hebelarm lw1 zur Folge hat;
- es wird angenommen, dass das Schiff aufgrund des Wellengangs von einem resultierenden Winkel des Gleichgewichts φ0 aus bis zu einem Rollwinkel φ1 windwärts schwingt; und der Krängungswinkel unter Einfluss des stetigen Windes φ0 soll 16 Grad oder 80 % des Winkels der eingetauchten Deckskante nicht überschreiten, je nachdem welcher Winkel kleiner ist;
- das Schiff ist sodann dem Winddruck einer Bö ausgesetzt, was zu einem krängenden Hebelarm einer Bö lw2 führt; und
- unter diesen Bedingungen soll die Fläche b entsprechend den Angaben in Abbildung 2.2.2.1 gleich oder größer als die Fläche a sein.
Abbildung 2.2.2.1 - Definition von Fläche a und Fläche b
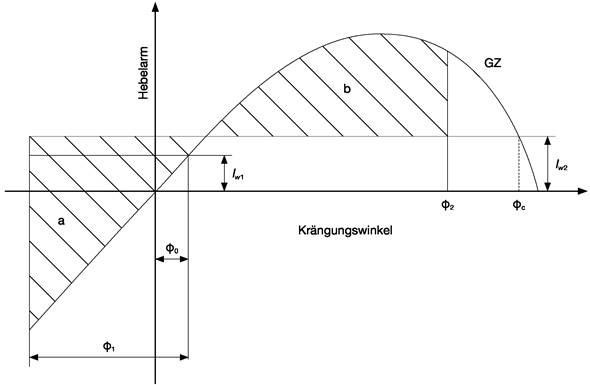
Die Winkel in Abbildung 2.2.2.1 sind wie folgt festgelegt:
| φ0 | = | Krängungswinkel unter Einfluss eines stetigen Windes (Grad) |
| φ1 | = | Rollwinkel windwärts unter Einfluss des Wellengangs (Grad) (siehe Absätze 2.2.2.1.2 und 2.2.2.4) 2 |
| φ2 | = | Einströmwinkel φf oder 50 Grad oder φc, je nachdem welcher Wert der kleinste ist, |
| hierbei ist: | ||
| φf | = | der Krängungswinkel, bei dem Öffnungen im Schiffskörper, in den Aufbauten oder in den Deckshäusern, die nicht wetterdicht verschlossen werden können, eintauchen. Bei der Anwendung dieses Kriteriums bleiben kleinere Öffnungen, durch die keine fortschreitende Flutung stattfinden kann, unberücksichtigt; |
| φc | = | der Winkel des zweiten Schnittpunkts zwischen der Kurve des Winddruck-Hebelarms lw2 und der GZ-Kurven. |
2.2.2.2 Die krängenden Hebelarme aus dem Winddruck lw1 und lw2, auf die in den Absätzen 2.2.2.1.1 und 2.2.2.1.3 Bezug genommen wird, sind konstante Werte bei allen Krängungswinkeln und sind wie folgt zu berechnen:
Lw1 = ( P ⋅ AL ⋅ Z) / (1000 ⋅ g ⋅ Δ) (m) und
Lw2 = 1,5 ⋅ Lw1 (m)
hierbei ist:
| P | = | Winddruck von 504 Pa. Der für Schiffe mit eingeschränktem Fahrtbereich benutzte Wert P entsprechend Absatz 2.2.1.6 kann herabgesetzt werden. |
2.2.2.3 Es können alternative Verfahren zur Bestimmung des Hebelarmes bei Windeinwirkung lw1 als gleichwertige Verfahren zu der Berechnung in 2.2.2.2 akzeptiert werden. Werden solche alternativen Prüfungen durchgeführt, ist auf die von der Organisation entwickelten Richtlinien zu verweisen.3 Die in den Prüfungen eingesetzte Windgeschwindigkeit soll bei der Großausführung mit einem einheitlichen Geschwindigkeitsprofil 26 m/s betragen. Der Wert der Windgeschwindigkeit für Schiffe mit Betriebsbeschränkungen kann entsprechend Absatz 2.2.1.6 herabgesetzt werden.
2.2.2.4 Der in Absatz 2.2.2.1 genannte Rollwinkel φ1 ist wie folgt zu berechnen:
| φ1 = 109 ⋅ k ⋅ X1 ⋅ X2 ⋅ √( r ⋅ s) (Grad) | ||
| hierbei ist: | ||
| X1 | = | Faktor wie in Tabelle 2.2.2.4-1 angegeben |
| X2 | = | Faktor wie in Tabelle 2.2.2.4-2 angegeben |
| k | = | Faktor wie folgt: |
| k = 1,0 für ein Schiff mit runder Kimm ohne Schlingerkiele oder Balkenkiel | ||
| k = 0,7 für ein Schiff mit scharfer Kimm | ||
| k = für ein Schiff mit Schlingerkielen, einem Balkenkiel oder beiden entsprechend Tabelle 2.2.2.4-3 | ||
| r | = | 0,73 + 0,6 OG / d, hierbei ist OG = KG - d |
| s | = | Wellensteilheit entsprechend Tabelle 2.2.2.4-4 |
| Ak | = | Gesamtfläche der Schlingerkiele oder projizierte Lateralfläche des Balkenkiels oder die Summe dieser Flächen (m2). |
Der Rollwinkel φ1 von Schiffen mit Schlingerdämpfungsanlagen soll ohne Berücksichtigung des Betriebs dieser Anlagen bestimmt werden, es sei denn, die Verwaltung gibt sich mit dem Nachweis zufrieden, dass die Anlagen auch bei einem plötzlichen Ausfall ihrer Stromversorgung wirksam sind.
Tabelle 2.2.2.4-1 - Werte des Faktors X1
| B/d | X1 |
| ≤ 2,4 | 1,0 |
| 2,5 | 0,98 |
| 2,6 | 0,96 |
| 2,7 | 0,95 |
| 2,8 | 0,93 |
| 2,9 | 0,91 |
| 3,0 | 0,90 |
| 3,1 | 0,88 |
| 3,2 | 0,86 |
| 3,4 | 0,82 |
| ≥ 3,5 | 0,80 |
Tabelle 2.2.2.4-2 - Werte des Faktors X2
| CB | X2 |
| ≤ 0,45 | 0,75 |
| 0,50 | 0,82 |
| 0,55 | 0,89 |
| 0,60 | 0,95 |
| 0,65 | 0,97 |
| ≥ 0,70 | 1,00 |
Tabelle 2.2.2.4-3 - Werte des Faktors k
| ( Ak ⋅ 100)/( LWL ⋅ B) | k |
| 0 | 1,0 |
| 1,0 | 0,98 |
| 1,5 | 0,95 |
| 2,0 | 0,88 |
| 2,5 | 0,79 |
| 3,0 | 0,74 |
| 3,5 | 0,72 |
| ≥ 4,0 | 0,70 |
Tabelle 2.2.2.4-4 - Werte der Wellensteilheit s
| Natürliche Rollperiode Tr (s) | Wellensteilheitsfaktor s |
| ≤ 6 | 0,100 |
| 7 | 0,098 |
| 8 | 0,093 |
| 12 | 0,065 |
| 14 | 0,053 |
| 16 | 0,044 |
| 18 | 0,038 |
| 20 | 0,032 |
| 22 | 0,028 |
| 24 | 0,025 |
| 26 | 0,023 |
| 28 | 0,021 |
| ≥ 30 | 0,020 |
Anmerkung: Zwischenwerte in diesen Tabellen sind durch lineare Interpolation zu ermitteln.
2.2.2.5 Bei Schiffen, die Betriebsbeschränkungen entsprechend Absatz 2.2.1.6 unterliegen, kann der Wellensteilheitsfaktor s in Tabelle 2.2.2.4-4 abgeändert werden.
2.2.2.6 Bei jedem Schiff kann der Rollwinkel φ1 auch durch alternative Verfahren auf der Grundlage der von der Organisation entwickelten Richtlinien 4 bestimmt werden.
2.2.3 Anfälligkeitskriterium der Stufe 2 für den Versagensmodus "Totalausfall des Schiffes"
2.2.3.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Totalausfall des Schiffes" angesehen, wenn
| C ≤ RDS0 | ||
| hierbei ist: | ||
| RDS0 | = | 0,06; |
| C | = | Langzeit-Wahrscheinlichkeitsindex, der die Anfälligkeit des Schiffes für ein Stabilitätsversagen beim Totalausfall des Schiffes auf der Grundlage der Wahrscheinlichkeit des Auftretens kurzzeitiger Umgebungsverhältnisse bemisst, wie in Absatz 2.2.3.2 entsprechend vorgegeben. |
2.2.3.2 Der Wert C wird als gewichteter Mittelwert aus einer Reihe von kurzzeitigen Umgebungsverhältnissen wie folgt berechnet:
 | ||
| hierbei ist: | ||
| Wi | = | Gewichtungsfaktor für das kurzzeitige Umgebungsverhältnis, wie in Abschnitt 2.7.2 vorgegeben; |
| CS,i | = | Kurzzeitindex für das Stabilitätsversagen beim Totalausfall des Schiffes für das betrachtete kurzzeitige Umgebungs verhältnis, berechnet entsprechend Absatz 2.2.3.2.1; |
| N | = | Gesamtanzahl der kurzzeitigen Umgebungsverhältnisse entsprechend Abschnitt 2.7.2. |
2.2.3.2.1 Der Kurzzeitindex für das Stabilitätsversagen beim Totalausfall des Schiffes CS,ifür die betrachteten kurzzeitigen Umgebungsverhältnisse ist ein Maß für die Wahrscheinlichkeit, dass das Schiff während der betrachteten Expositionszeit mindestens einmal bestimmte Krängungswinkel überschreitet, wobei ein effektiver relativer Winkel zwischen dem Schiff und den Wellen berücksichtigt wird. Jeder Index CS,i wird nach der folgenden Formel berechnet:
| CS,i | = | 1, wenn entweder: |
.1 der mittlere Winddruck-Hebelarm (entsprechend Absatz 2.2.3.2.2) den aufrichtenden Hebelarm GZ bei jedem Krängungswinkel nach Lee überschreitet; oder (entsprechend Absatz 2.2.3.2.2) den aufrichtenden Hebelarm GZ bei jedem Krängungswinkel nach Lee überschreitet; oder | ||
| .2 der stabile Krängungswinkel bei stetigem Wind φ S größer ist als der Winkel, bei dem die Stabilität versagt, nach Lee φfail,+; und | ||
| = | 1 - exp (- rEA Texp), in allen anderen Fällen; | |
| hierbei ist:
Die Krängungswinkel sind nach Lee als positiv und nach Luv als negativ anzunehmen. | ||
| Texp | = | Expositionszeitraum, der mit 3600 s anzusetzen ist; |
| rEA | = |  |
| RIEA+ | = |  |
| RIEA- | = |  |
 | = | mittlere Referenz-Nulldurchgangsperiode der effektiven relativen Rollbewegung unter der Einwirkung von Wind und Wellen entsprechend Absatz 2.2.3.2.3 (s); |
 | = | Standardabweichung der effektiven relativen Rollbewegung unter der Einwirkung von Wind und Wellen entsprechend Absatz 2.2.3.2.3 (rad); |
| δφres,EA+ | = | Bereich der Reststabilität bis zum Grenzwinkel der leeseitigen äquivalenten Fläche, der wie folgt zu berechnen ist φEA+ - φS (rad) |
| δφres,EA- | = | Bereich der Reststabilität bis zum Grenzwinkel der luvseitigen äquivalenten Fläche, der wie folgt zu berechnen ist φS - φEA- (rad); |
| φEA+ | = | flächenäquivalenter virtueller Grenzwinkel nach Lee, der wie folgt zu berechnen ist  |
| φEA- | = | flächenäquivalenter virtueller Grenzwinkel nach Luv, der wie folgt zu berechnen ist  |
| φS | = | stabiler Krängungswinkel aufgrund des mittleren Winddruck-Hebelarms , der entsprechend Absatz 2.2.3.2.2 bestimmt wird (rad); , der entsprechend Absatz 2.2.3.2.2 bestimmt wird (rad); |
| Ares,+ | = | Fläche unter der restlichen Kurve der aufrichtenden Hebelarme (d. h. GZ -) von φS bis φfail,+ (m rad); |
| Ares,- | = | Fläche unter der restlichen Kurve der aufrichtenden Hebelarme (d. h. GZ -) von φfail,- bis φS (m rad); |
| GMres | = | metazentrische Resthöhe, die als Steigung der restlichen Kurve der aufrichtenden Hebelarme (d. h. GZ -) bei φS anzunehmen ist (m); |
| φfail,+ | = | Winkel, bei dem die Stabilität versagt, nach Lee, der als Minimum { φVW,+, φcrit,+} anzunehmen ist (rad); |
| φfail,- | = | Winkel, bei dem die Stabilität versagt, nach Luv, der als Maximum { φVW,-, φcrit,-} anzunehmen ist (rad); |
| φVW,+ | v | Winkel des zweiten Schnittpunktes nach Lee zwischen dem mittleren Winddruck-Hebelarm und der GZ-Kurve; |
| φVW,- | = | Winkel des zweiten Schnittpunktes nach Luv zwischen dem mittleren Winddruck-Hebelarm und der GZ-Kurve; |
| φcrit,+ | = | kritischer Winkel nach Lee, der als Minimum { φf,+, 50 deg} anzunehmen ist (rad); |
| φcrit,- | = | kritischer Winkel nach Luv, der als Maximum { φf,-, -50 deg} anzunehmen ist (rad); |
| φf,+, φf,- | = | Einströmwinkel nach Lee bzw. Luv in Übereinstimmung mit dem Begriff "Einströmwinkel" in Absatz 2.3.1 Teil A des IS-Codes 2008 (rad). |
2.2.3.2.2 Der mittlere Winddruck-Hebelarm ist ein konstanter Wert bei allen Krängungswinkeln und wird entsprechend der folgenden Formel berechnet:
 | ||
| hierbei ist: | ||
 | = | mittleres Windkrängungsmoment, das wie folgt zu berechnen ist:  |
| Uw | = | mittlere Windgeschwindigkeit, die wie folgt zu berechnen ist: ( Hs/0,06717)2/3 (m/s) Es können andere Ausdrücke verwendet werden, wenn alternative Umgebungsverhältnisse entsprechend Absatz 2.2.1.6 berücksichtigt werden; |
| Cwhm | = | Koeffizient des Windkrängungsmoments, der mit 1,22 anzunehmen ist oder nach anderen Verfahren ermittelt wird; |
| Hs | = | signifikante Wellenhöhe für die betrachteten kurzzeitigen Umgebungsverhältnisse entsprechend Abschnitt 2.7.2. |
2.2.3.2.3 Für die betrachteten kurzzeitigen Umgebungsverhältnisse werden die mittlere Referenz-Nulldurchgangsperiode der effektiven relativen Rollbewegung, und die entsprechende Standardabweichung, die bei der Berechnung des Kurzzeitindexes für das Stabilitätsversagen beim Totalausfall des Schiffes CS,i zu verwenden ist, unter Verwendung des Spektrums der effektiven relativen Rollbewegung unter der Einwirkung von Wind und Wellengang entsprechend den folgenden Formeln bestimmt:
| = | ( m0)1/2 (rad) |
| = | 2π (m0/ m2)1/2 (s) |
| hierbei ist: | ||
| m0 | = | Fläche gemäß dem Spektrum S( ω)(rad2); |
| m2 | = | Fläche gemäß der Funktion ω2 S( ω) (rad4/s2); |
| S( ω) | = | Spektrum des effektiven relativen Rollwinkels, das wie folgt zu berechnen ist: 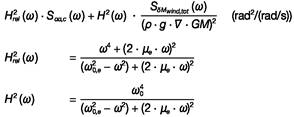 |
| Sαα,cω | = | Spektrum der effektiven Wellenneigung, zu berechnen als
r2( ω) Sααω (rad2/(rad/s)) |
| Sααω | = | Spektrum der Wellenneigung, zu berechnen als ω4/g2 x Szz( ω) (rad2/(rad/s)) |
| Szz( ω) | = | Spektrum der Wellenhubenergie (m2/(rad/s)). Der Standardausdruck für Szz( ω) ist in Absatz 2.7.2.1.1 definiert. Es können andere Ausdrücke verwendet werden, wenn alternative Umgebungsverhältnisse entsprechend Absatz 2.2.1.6 berücksichtigt werden; |
 | = | Spektrum des Moments, das durch die Einwirkung der Böe entsteht, zu berechnen als [ ρair ⋅ Uw ⋅ Cwhm ⋅ AL ⋅ Z]2 ⋅ Χ2(ω) Sv(ω) (( Nm)2/( rad/ s)) |
| Χ (ω) | = | Standardfunktion der aerodynamischen Admittanz, die als Konstante mit dem Wert 1,0 anzunehmen ist; |
| Sv(ω) | = | Böigkeitsspektrum.
Der Standardausdruck für Sv(ω) ist wie folgt:  mit K = 0,003 und XD = 600 ⋅ ω / (p × Uw). Es können andere Ausdrücke verwendet werden, wenn alternative Umgebungsverhältnisse entsprechend Absatz 2.2.1.6 berücksichtigt werden; |
| μe | = | äquivalenter linearer Rolldämpfungskoeffizient (1/s), berechnet nach dem stochastischen Linearisierungsverfahren. Dieser Koeffizient hängt von den linearen und nichtlinearen Rolldämpfungskoeffizienten und von der spezifischen Standardabweichung der Rollgeschwindigkeit unter den betrachteten kurzzeitigen Umgebungsverhältnissen ab; |
| ω0,e (φs) | = | modifizierte Roll-Eigenfrequenz in der Nähe des Krängungswinkels φS, zu berechnen als ω0 ⋅ (GMres / GM)1/2 (rad/s) |
| ω0 | = | aufrechte natürliche Rollfrequenz = 2π / Tr (rad/s); |
| r(ω) | = | Funktion der effektiven Wellen neigung, die entsprechend Absatz 2.2.3.2.4 bestimmt wird; |
| und andere Variablen, die in den Absätzen 2.2.3.2.1 und 2.2.3.2.2 definiert sind. | ||
2.2.3.2.4 Die Funktion der effektiven Wellenneigung r( ω) ist nach einem zuverlässigen Verfahren anzugeben, das auf Berechnungen beruht oder aus experimentellen Daten 5 abgeleitet ist und von der Verwaltung anerkannt wird.
2.2.3.2.5 Sollten nicht ausreichend Informationen vorliegen, ist das empfohlene Verfahren zur Abschätzung der effektiven Wellenneigungsfunktion zu verwenden, die auf den folgenden Annahmen und Annäherungen beruht:
- Der Unterwasserteil jedes Querschnitts des Schiffes wird durch einen "gleichwertigen Unterwasserquerschnitt" ersetzt, der im Allgemeinen die gleiche Breite an der Wasserlinie und den gleichen Unterwasserquerschnitt wie der ursprüngliche Querschnitt hat;
aber:- Querschnitte mit einer Breite von Null an der Wasserlinie, wie z.B. die im Bereich des Wulstbuges, werden vernachlässigt; und
- der Tiefgang des "gleichwertigen Unterwasserquerschnitts" wird auf den Querschnittstiefgang des Schiffes begrenzt;
- der effektive Wellenneigungskoeffizient für jede Wellenfrequenz wird unter Verwendung des "äquivalenten Unterwasserquerschnittes" bestimmt, wobei nur der ungestörte lineare Wellendruck berücksichtigt wird;
- für jeden Abschnitt wird eine Formel angewendet, die für Rechtecke exakt ist.
2.2.3.2.6 Das empfohlene Verfahren wird unter Berücksichtigung des tatsächlichen Trimms des Schiffes angewendet. Das empfohlene Verfahren zur Abschätzung der effektiven Wellenneigung ist nur auf Einrumpfschiffe anwendbar. Für ein Schiff, das nicht in diese Kategorie fällt, sollen alternative Prognoseverfahren angewendet werden.
2.3 Bewertung der Anfälligkeit des Schiffes für den Versagensmodus "Übermäßige Beschleunigung"
2.3.1 Anwendung
2.3.1.1 Die nachstehenden Bestimmungen gelten für jedes Schiff in jedem Ladefall, sofern:
- der Abstand von der Wasserlinie bis zum höchsten Punkt entlang der Schiffslänge, an dem sich Fahrgäste oder Besatzungsmitglieder aufhalten können, mehr als 70 % der Schiffsbreite beträgt; und
- die metazentrische Höhe 8 % der Breite des Schiffes übersteigt.
2.3.1.2 Für jeden Ladefall und jede Stelle entlang der Länge des Schiffes, an der sich Fahrgäste oder Besatzungsmitglieder aufhalten können:
- gilt ein Schiff, das die in den Kriterien des Abschnitts 2.3.2 enthaltenen Standards erfüllt, als nicht anfällig für den Versagensmodus "Übermäßige Beschleunigung"; und
- ist ein Schiff, das die in den Kriterien des Abschnitts 2.3.2 enthaltenen Standards nicht erfüllt, einer eingehenderen Bewertung der Anfälligkeit für den Versagensmodus "Übermäßige Beschleunigung" unter Anwendung der in Abschnitt 2.3.3 enthaltenen Kriterien zu unterziehen.
2.3.1.3 Alternativ zu den in den Abschnitten 2.3.2 oder 2.3.3 enthaltenen Kriterien kann ein Schiff für jeden Ladefall einer der folgenden Bedingungen unterliegen:
- direkte Stabilitätsbewertung für den Versagensmodus "Übermäßige Beschleunigung", die entsprechend Kapitel 3 durchgeführt wird; oder
- betriebliche Maßnahmen, die entsprechend Kapitel 4 entwickelt wurden.
2.3.1.4 Eine ausführliche Bewertung der Anfälligkeit der Stufe 2 entsprechend den in Abschnitt 2.3.3 enthaltenen Kriterien kann durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.3.2 durchzuführen. Gleichermaßen kann eine detaillierte direkte Stabilitätsbewertung entsprechend Absatz 2.3.1.3.1 durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.3.2 oder Abschnitt 2.3.3 durchzuführen.
2.3.1.5 Angaben zur Stabilitätsgrenze für die Bestimmung der sicheren Bereiche als Funktionen von GM, Tiefgang und Trimm sind auf der Grundlage von Matrixberechnungen entsprechend den in den Abschnitten 2.3.2 oder 2.3.3 enthaltenen Kriterien und gegebenenfalls einer direkten Stabilitätsbewertung entsprechend den Bestimmungen in Kapitel 3 über die direkte Bewertung der Stabilität zu machen. Gegebenenfalls sollen die Angaben zu den Stabilitätsgrenzen für die Bestimmung der sicheren Bereiche betriebliche Maßnahmen oder betriebliche Anleitungen entsprechend den Bestimmungen in Kapitel 4 über betriebliche Maßnahmen berücksichtigen.
2.3.1.6 Die für die Bewertung zu verwendenden Referenz-Umgebungsverhältnisse können entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 geändert werden.
2.3.1.7 Korrekturen durch freie Oberflächen sollen nicht vorgenommen werden.
2.3.2 Anfälligkeitskriterium der Stufe 1 für den Versagensmodus "Übermäßige Beschleunigung"
2.3.2.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Übermäßige Beschleunigung" angesehen, wenn für jeden Ladefall und jede Stelle entlang der Länge des Schiffes, an der sich Fahrgäste oder Besatzung aufhalten können,
φ ⋅ kL ⋅ (g + 4π2hr / ) ≤ REA1 ) ≤ REA1 | ||
| hierbei ist: | ||
| REA1 | = | 4,64 (m/s2); |
| φ | = | charakteristische Rollamplitude = 4,43 r s / ; ; |
| kL | = | Faktor, der die gleichzeitige Wirkung von Roll-, Gier- und Stampfbewegungen berücksichtigt, |
| = | 1,125 - 0,625 x/ L, wenn x < 0,2 L, | |
| = | 1,0 wenn 0,2 L ≤ x ≤ 0,65 L, | |
| = | 0,527 + 0,727 x/ L, wenn x > 0,65 L; | |
| x | = | Längsabstand (m) der Stelle, an der sich Fahrgäste oder Besatzung aufhalten können, vom hinteren Ende von L; |
| hr | = | Höhe über der angenommenen Rollachse an der Stelle, an der sich Fahrgäste oder Besatzungsmitglieder aufhalten können (m), wobei die Rollachse als in der Mitte zwischen der Wasserlinie und dem vertikalen Schwerpunkt liegend angenommen werden kann; |
| r | = | effektiver Wellenneigungskoeffizient 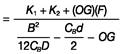 |
| K1 |  | |
| K2 |  | |
| OG | KG - d; | |
| F |  | |
| ß |  | |
| τ |  | |
 |  | |
 |  | |
| s | = | Wellensteilheit als Funktion der natürlichen Rollperiode Tr (siehe Abschnitt 2.7.1), wie in Tabelle 2.3.2.1 angegeben; und |
| δφ | dimensionsloses logarithmisches Dekrement der Rolldämpfung. | |
Tabelle 2.3.2.1 - Werte der Wellensteilheit s
(Die Zwischenwerte in der Tabelle sollen durch lineare Interpolation ermittelt werden)
| Natürliche Rollperiode Tr(s) | Wellensteilheit s |
| ≤ 6 | 0,100 |
| 7 | 0,098 |
| 8 | 0,093 |
| 12 | 0,065 |
| 14 | 0,053 |
| 16 | 0,044 |
| 18 | 0,038 |
| 20 | 0,032 |
| 22 | 0,028 |
| 24 | 0,025 |
| 26 | 0,023 |
| 28 | 0,021 |
| ≥ 30 | 0,020 |
2.3.3 Anfälligkeitskriterium der Stufe 2 für den Versagensmodus "Übermäßige Beschleunigung"
2.3.3.1 Ein Schiff in einem Ladefall wird nicht als anfällig für den Versagensmodus "Übermäßige Beschleunigung" angesehen, wenn für jede Stelle entlang der Länge des Schiffes, an der sich Fahrgäste oder Besatzung aufhalten können,
| C ≤ REA2 | ||
| hierbei ist: | ||
| REA2 | = | 0,00039; |
| C | = | Langzeit-Wahrscheinlichkeitsindex, der die Anfälligkeit des Schiffes für ein Stabilitätsversagen aufgrund übermäßiger Beschleunigung für den betrachteten Ladefall und den betrachteten Ort auf der Grundlage der Wahrscheinlichkeit des Auftretens kurzzeitiger Umgebungsverhältnisse bemisst, wie in Absatz 2.3.3.2 entsprechend vorgegeben. |
2.3.3.2 Der Wert von C wird als gewichteter Mittelwert aus einer Reihe von kurzfristigen Umgebungsverhältnissen wie folgt berechnet:
 | ||
| hierbei ist: | ||
| Wi | = | Gewichtungsfaktor für das kurzzeitige Umgebungsverhältnis, wie in Abschnitt 2.7.2 vorgegeben; |
| CS,i | = | Kurzzeitindex für das Versagen bei übermäßiger Beschleunigung für das betrachtete kurzzeitige Umgebungsverhältnis, berechnet entsprechend Absatz 2.3.3.2.1; und |
| N | = | Gesamtanzahl der kurzzeitigen Umgebungsverhältnisse entsprechend Abschnitt 2.7.2. |
2.3.3.2.1 Der Kurzzeitindex für das Versagen bei übermäßiger Beschleunigung CS,ifür den Ladefall, den Standort und das betrachtete kurzfristige Umgebungsverhältnis ist ein Maß für die Wahrscheinlichkeit, dass das Schiff eine bestimmte Querbeschleunigung überschreitet, berechnet entsprechend der folgenden Formel:
 | ||
| hierbei ist: | ||
| R2 | = | 9,81(m/s2); |
| σLAi | = | Standardabweichung der Querbeschleunigung bei Geschwindigkeit Null und querabgehendem Seegang, bestimmt entsprechend Absatz 2.3.3.2.2 (m/s2). |
2.3.3.2.2 Die Standardabweichung der Querbeschleunigung bei Geschwindigkeit Null und querabgehendem Seegang σLAi wird anhand des Spektrums der Rollbewegung durch Welleneinwirkung bestimmt. Das Quadrat dieser Standardabweichung wird entsprechend der folgenden Formel berechnet:
 | ||
| hierbei ist: | ||
| Δω | = | Intervall der Wellenfrequenz (rad/s) = (ω2 - ω1) / N (rad/s); |
| ω2 | = | obere Frequenzgrenze des Wellenspektrums im Prüfbereich = min((25 / Tr), 2,0) (rad/s); |
| ω1 | = | untere Frequenzgrenze des Wellenspektrums im Prüfbereich = max((0,5 / Tr), 0,2) (rad/s); |
| N | = | Anzahl der Intervalle der Wellenfrequenz im Prüfbereich, die nicht kleiner als 100 sein darf; |
| ωj | = | Wellenfrequenz in der Mitte des betrachteten Frequenzintervalls = ω1 + ((2 j - 1) / 2) Δω (rad/s); |
| Szz(ωj) | = | Spektrum des Wellenhubs (m2/(rad/s)). Der Standardausdruck für Szz(ω) ist in Absatz 2.7.2.1.1 definiert. |
| ay(ωj) | = | Querbeschleunigung kL( g + hr ⋅ ωj2) ⋅ φa( ωj) = je Einheit der Wellenamplitude ((m/s2)/m); |
| kL, hr | = | wie in Absatz 2.3.2.1 definiert; |
| φa(ωj) | = | Rollamplitude bei regelmäßigen Seitenwellen der Einheitsamplitude und Kreisfrequenz ωj bei Geschwindigkeit Null, = (φr(ωj)2 + φi(ωj)2)0,5 (rad/m); |
| φr(ωj) | = |  |
| φi(ωj) | = |  |
| a, b | = | Kosinus- bzw. Sinuskomponenten des Froude-Krylov-Rollmoments bei regelmäßigen Seitenwellen der Einheitsamplitude (kN ⋅ m/m), direkt oder unter Verwendung einer geeigneten Näherung berechnet; |
| Be | = | äquivalenter linearer Rolldämpfungsfaktor (kN m s), mit Be = 2 Jt,roll μe, wobei μe (1/s) der äquivalente lineare Rolldämpfungskoeffizient ist; |
| JT,roll | = | = Rollträgheitsmoment einschließlich addiertes Trägheitsmoment  |
Als Alternative können auch andere geeignete Formulierungen für die numerische Integration im Bereich von ω1 bis ω2 verwendet werden.
2.4 Bewertung der Anfälligkeit des Schiffes für den Versagensmodus "Totaler Stabilitätsverlust"
2.4.1 Anwendung
2.4.1.1 Die nachstehenden Bestimmungen gelten für alle Schiffe, mit Ausnahme von Schiffen mit einem ausgedehnten, niedrigen Wetterdeck 6, für welche die Froude-Zahl Fn, entsprechend der Dienstgeschwindigkeit, 0,24 übersteigt.
2.4.1.2 Für jeden Ladefall
- gilt ein Schiff, das die in den Kriterien des Abschnitts 2.4.2 enthaltenen Standards erfüllt, als nicht anfällig für den Versagensmodus "Totaler Stabilitätsverlust"; und
- ist ein Schiff, das die in den Kriterien des Abschnitts 2.4.2 enthaltenen Standards nicht erfüllt, einer eingehenderen Bewertung der Anfälligkeit für den Versagensmodus "Totaler Stabilitätsverlust" unter Anwendung der in Abschnitt 2.4.3 enthaltenen Kriterien zu unterziehen.
2.4.1.3 Alternativ zu den in den Abschnitten 2.4.2 oder 2.4.3 enthaltenen Kriterien kann ein Schiff für jeden Ladefall einer der folgenden Bedingungen unterliegen:
- direkte Stabilitätsbewertung für den Versagensmodus "Totaler Stabilitätsverlust", die entsprechend den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 durchgeführt wird; oder
- betriebliche Maßnahmen entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4.
2.4.1.4 Eine ausführliche Bewertung der Anfälligkeit der Stufe 2 entsprechend den in Abschnitt 2.4.3 enthaltenen Kriterien kann durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.4.2 durchzuführen. Gleichermaßen kann eine detaillierte direkte Stabilitätsbewertung entsprechend Absatz 2.4.1.3.1 durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.4.2 oder Abschnitt 2.4.3 durchzuführen.
2.4.1.5 Angaben zur Stabilitätsgrenze für die Bestimmung der sicheren Bereiche als Funktionen von GM, Tiefgang und Trimm sind auf der Grundlage von Matrixberechnungen entsprechend den in den Abschnitten 2.4.2 oder 2.4.3 enthaltenen Kriterien und gegebenenfalls einer direkten Stabilitätsbewertung entsprechend den Bestimmungen in Kapitel 3 über die direkte Bewertung der Stabilität zu machen. Gegebenenfalls sind in den Angaben zu den Stabilitätsgrenzen für die Bestimmung der sicheren Bereiche betriebliche Maßnahmen entsprechend den Bestimmungen in Kapitel 4 zu berücksichtigen.
2.4.1.6 Die für die Bewertung zu verwendenden Referenz-Umgebungsverhältnisse können entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 geändert werden.
2.4.1.7 Die Einflüsse freier Oberflächen sollen berücksichtigt werden, wie es in Kapitel 3 des Teils B des IS-Codes 2008 empfohlen wird.
2.4.2 Anfälligkeitskriterium der Stufe 1 für den Versagensmodus "Totaler Stabilitätsverlust"
2.4.2.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Totaler Stabilitätsverlust" angesehen, wenn
 | ||
| hierbei ist: | ||
| RPLA | = | 0,05 (m); und |
| GMmin | = | Mindestwert der metazentrischen Höhe (m), berechnet nach Absatz 2.4.2.2. |
2.4.2.2 Wie in Absatz 2.4.2.1 vorgegeben, ist GMmin wie folgt zu bestimmen:
 | ||
| hierbei ist: | ||
| ITL | = | Breitenträgheitsmoment der Wasserfläche beim Tiefgang dL (m4); |
| dL | = | d - σdL (m);  und d - 0,25 dfull soll nicht kleiner als mit Null angenommen werden; und |
| SW | = | 0,0334. |
2.4.2.3 Die in Abschnitt 2.4.2.2 beschriebene vereinfachte konservative Schätzung von GMmin ohne anfängliche Trimmwirkung kann bei Schiffen bei nichtebenem Kiel angewendet werden.
2.4.3 Anfälligkeitskriterium der Stufe 2 für den Versagensmodus "Totaler Stabilitätsverlust"
2.4.3.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Totaler Stabilitätsverlust" angesehen, wenn während der Fahrt mit der Dienstgeschwindigkeit Vs
| max(CR1, CR2) ≤ RPL0 | ||
| hierbei ist: | ||
| RPL0 | = | 0,06; und |
| CR1, CR2 | = | nach Absatz 2.4.3.2 berechnete Kriterien. |
2.4.3.2 Jedes der beiden Kriterien CR1 und CR2 in Absatz 2.4.3.1 stellt einen gewichteten Mittelwert bestimmter Stabilitätsparameter für ein Schiff dar, das als statisch positioniert in Wellen einer definierten Höhe Hi und Länge λi betrachtet wird, die entsprechend Abschnitt 2.4.3.2.2 er mittelt wurden. CR1 und CR2 werden wie folgt berechnet:
 | ||
 | ||
| hierbei ist: | ||
| CR1 | = | gewichtetes Kriterium 1, berechnet unter Verwendung des Kriteriums 1, C1i, wie nach Absatz 2.4.3.3 ermittelt; |
| CR2 | = | gewichtetes Kriterium 2, berechnet unter Verwendung des Kriteriums 2, C2i, wie nach Absatz 2.4.3.4 ermittelt; |
| Wi | = | Gewichtungsfaktor für das kurzzeitige Umgebungsverhältnis, wie nach Absatz 2.4.3.2.2 vorgegeben; |
| N | = | Gesamtanzahl der Wellenfälle, für die C1i und C2i ermittelt werden, entsprechend Absatz 2.4.3.2.2. |
2.4.3.2.1 Für die Berechnung des Rückstellmoments bei Wellen sind die folgenden Wellenlängen und Wellenhöhen zu verwenden:
Länge λ = L; und
Höhe h = 0,01 ⋅ iL i = 0,1, ..., 10.
Der Index für die beiden Kriterien, die auf φv und φs beruhen, sind entsprechend den in Absatz 2.4.3.3 bzw. 2.4.3.4 angegebenen Formeln zu berechnen. Dies wird für den betrachteten Ladefall durchgeführt, wobei davon ausgegangen wird, dass das Schiff in einer Reihe von Wellen mit den oben beschriebenen Eigenschaften in Bezug auf Eintauchung und Trimm ausbalanciert ist.
Bei diesen zu untersuchenden Wellen ist der Wellenkamm mittschiffs und bei 0,1 L, 0,2 L, 0,3 L, 0,4 L und 0,5 L nach vorn und bei 0,1 L, 0,2 L, 0,3 L und 0,4 L nach achtern zu zentrieren.
2.4.3.2.2 Für jede in Abschnitt 2.7.2 angegebene Kombination von Hs und Tz erhält man Wi als den Wert in Tabelle 2.7.2.1.2, geteilt durch die in dieser Tabelle angegebene Anzahl von Beobachtungen, die mit einem Hi entsprechend der nachfolgenden Berechnung in Abschnitt 2.4.3.2.3 verbunden ist, und λi wird gleich L gesetzt. Die Indizes für jedes Hi sind aus dem Verhältnis zwischen h, das in Abschnitt 2.4.3.2.1 verwendet wurde, und den Indizes, die in Abschnitt 2.4.3.2.1 oben ermittelt wurden, linear zu interpolieren.
2.4.3.2.3 Die oberen 3 % der effektiven Wellenhöhe Hi werden für die Verwendung bei der Prüfung der Anforderungen durch Filtern der Wellen (mit bestimmten Werten) innerhalb der Schiffslänge berechnet. Zu diesem Zweck ist eine geeignete Form des Wellenspektrums anzunehmen.
2.4.3.3 Kriterium 1
Kriterium 1, C1i, ist ein Kriterium, das auf der Berechnung des Kenterwinkels φV beruht, wie in der folgenden Formel angegeben:
 | ||
| hierbei ist: | ||
| KPL1 | = | 30 (Grad). |
Der Kenterwinkel φV ist als der Mindestwert zu bestimmen, der entsprechend den Abschnitten 2.4.3.2.1, 2.4.3.2.2 und 2.4.3.2.3 für das Schiff ohne Berücksichtigung des Einströmwinkels berechnet wird.
2.4.3.4 Kriterium 2
Kriterium 2, C2i, ist ein Kriterium, das auf der Berechnung des Krängungswinkels φsw unter Einwirkung des Krängungshebels beruht, der durch lPL2 entsprechend der folgenden Formel angegeben wird:
 | ||
| hierbei ist: | ||
| KPL2 | = | 15 Grad bei Fahrgastschiffen; und |
| = | 25 Grad bei allen anderen Schiffstypen; | |
| lPL2 | = | 8( Hi / λ) dFn2 (m); |
| Hi | = | wie in den Absätzen 2.4.3.2.2 und 2.4.3.2.3 vorgegeben; |
| λ | = | wie in Absatz 2.4.3.2.2 vorgegeben. |
Der Krängungswinkel φsw ist als der Maximalwert zu bestimmen, der entsprechend den Abschnitten 2.4.3.2.1, 2.4.3.2.2 und 2.4.3.2.3 für das Schiff ohne Berücksichtigung des Einströmwinkels berechnet wird.
2.5 Bewertung der Anfälligkeit des Schiffes für den Versagensmodus "Parametrisches Rollen"
2.5.1 Anwendung
2.5.1.1 Für jeden Ladefall
- gilt ein Schiff, das die in den Kriterien des Abschnitts 2.5.2 enthaltenen Standards erfüllt, als nicht anfällig für den Versagensmodus "Parametrisches Rollen"; und
- ist ein Schiff, das die in den Kriterien des Abschnitts 2.5.2 enthaltenen Standards nicht erfüllt, einer eingehenderen Bewertung der Anfälligkeit für den Versagensmodus "Parametrisches Rollen" unter Anwendung der in Abschnitt 2.5.3 enthaltenen Kriterien zu unterziehen.
2.5.1.2 Alternativ zu den in den Abschnitten 2.5.2 oder 2.5.3 enthaltenen Kriterien kann ein Schiff für jeden Ladefall einer der folgenden Anforderungen unterliegen:
- einer direkten Stabilitätsbewertung für den Versagensmodus "Parametrisches Rollen", die entsprechend den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 durchgeführt wird; oder
- betrieblichen Maßnahmen für den Versagensmodus "Parametrisches Rollen" entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4.
2.5.1.3 Eine ausführliche Bewertung der Anfälligkeit der Stufe 2 entsprechend den in Abschnitt 2.5.3 enthaltenen Kriterien kann durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.5.2 durchzuführen. Gleichermaßen kann eine detaillierte direkte Stabilitätsbewertung entsprechend Absatz 2.5.1.2.1 durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.5.2 oder Abschnitt 2.5.3 durchzuführen.
2.5.1.4 Angaben zur Stabilitätsgrenze für die Bestimmung der sicheren Bereiche als Funktionen von GM, Tiefgang und Trimm sind auf der Grundlage von Matrixberechnungen entsprechend den in den Abschnitten 2.5.2 oder 2.5.3 enthaltenen Kriterien und gegebenenfalls einer direkten Stabilitätsbewertung entsprechend den Bestimmungen in Kapitel 3 über die direkte Bewertung der Stabilität zu machen. Gegebenenfalls sollen die Angaben zu den Stabilitätsgrenzen für die Bestimmung der sicheren Bereiche betriebliche Maßnahmen entsprechend den Bestimmungen in Kapitel 4 berücksichtigen.
2.5.1.5 Die für die Bewertung zu verwendenden Referenz-Umgebungsverhältnisse können entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 geändert werden.
2.5.1.6 Die Einflüsse freier Oberflächen sollen berücksichtigt werden, wie es in Kapitel 3 des Teils B des IS-Codes 2008 empfohlen wird.
2.5.2 Anfälligkeitskriterium der Stufe 1 für den Versagensmodus "Parametrisches Rollen"
2.5.2.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Parametrisches Rollen" angesehen, wenn
 | ||
| hierbei ist: | ||
| RPR | = | 1,87, wenn das Schiff eine scharfe Kimm hat, und andernfalls |
| = | 0,17 + 0,425(100 Ak / LB) wenn Cm,full > 0,96; | |
| = | 0,17 + (10,625 Cm,full - 9,775)(100 Ak
/ LB) wenn 0,94 ≤ Cm,full ≤ 0,96; | |
| = | 0,17 + 0,2125(100 Ak / LB) wenn Cm,full < 0,94; | |
| und bei jeder Formel soll (100 Ak/ LB) nicht mehr als 4 betragen | ||
| δGM1 | = | Amplitude der Schwankungen der metazentrischen Höhe (m), berechnet entsprechend Absatz 2.5.2.2. |
2.5.2.2 Wie in Absatz 2.5.2.1 vorgegeben, soll δGM1 wie folgt bestimmt werden:
 | ||
| hierbei ist: | ||
| δdH | = |  |
| ddL | = |  |
| und d - 0,25dfull soll nicht kleiner als mit Null angenommen werden; | ||
| dH | = | d + δdH (m); |
| dL | = | d - δdL (m); |
| SW | = | 0,0167; |
| ITH | = | Breitenträgheitsmoment der Wasserfläche beim Tiefgang dH (m4); und |
| ITL | = | Breitenträgheitsmoment der Wasserfläche beim Tiefgang dL (m4). |
2.5.2.3 Die in Abschnitt 2.5.2.2 beschriebene vereinfachte konservative Schätzung von δGM1 ohne anfängliche Trimmwirkung kann bei Schiffen bei nichtebenem Kiel angewendet werden.
2.5.3 Anfälligkeitskriterium der Stufe 2 für den Versagensmodus "Parametrisches Rollen"
2.5.3.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Parametrisches Rollen" angesehen, wenn
| ||
| hierbei ist: | ||
| RPR1 | = | 0,06; |
| RPR2 | = | 0,025; |
| C1 | = | Kriterium, berechnet entsprechend Absatz 2.5.3.2; und |
| C2 | = | Kriterium, berechnet entsprechend Absatz 2.5.3.3. |
2.5.3.2 Der Wert für C1 wird als gewichteter Mittelwert aus einer Reihe von Wellen entsprechend Absatz 2.5.3.2.3 wie folgt bestimmt:
 | ||
| hierbei ist: | ||
| Wi | = | Gewichtungsfaktor für die jeweilige Welle, wie in Absatz 2.5.3.2.3 vorgegeben; |
| Ci | = | 0, wenn entweder die in Absatz 2.5.3.2.1 für die Schwankungen von GM in Wellen oder die in Absatz 2.5.3.2.2 für die Schiffsgeschwindigkeit in Wellen genannten Anforderungen erfüllt sind; |
| = | 1, wenn sie nicht erfüllt sind; | |
| N | = | die Anzahl der bewerteten Wellenfälle, wie in Absatz 2.5.3.2.3 vorgegeben. |
2.5.3.2.1 Für jede in Absatz 2.5.3.2.3 angegebene Welle ist die Anforderung an die Schwankung von GM in Wellen erfüllt, wenn:
| GM( Hi, λi) > 0 und δGM( Hi, λi) / GM( Hi, λi) < RPR | ||
| hierbei ist: | ||
| RPR | = | wie in Absatz 2.5.2.1 definiert; |
| δGM( Hi, λi) | = | die Hälfte der Differenz zwischen dem Höchst- und dem Mindestwert der für das Schiff berechneten metazentrischen Höhe (m), die dem betrachteten Ladefall entspricht, wobei davon ausgegangen wird, dass das Schiff in Bezug auf Eintauchung und Trimm auf einer Reihe von Wellen, die durch eine Wellenhöhe Hi, und eine Wellenlänge λi gekennzeichnet sind, im Gleichgewicht ist; |
| GM( Hi, λi) | = | der für das Schiff berechnete Mittelwert der metazentrischen Höhe (m), der dem betrachteten Ladefall entspricht, wobei davon ausgegangen wird, dass das Schiff in Bezug auf Eintauchung und Trimm auf einer Reihe von Wellen, die durch eine Wellenhöhe Hi, und eine Wellenlänge λi gekennzeichnet sind, im Gleichgewicht ist; |
| Hi | = | die in Absatz 2.5.3.2.3 angegebene Wellenhöhe (m); und |
| λi | = | die in Absatz 2.5.3.2.3 angegebene Wellenlänge (m). |
2.5.3.2.2 Für jede in Absatz 2.5.3.2.3 angegebene Welle ist die Anforderung an die Schiffsgeschwindigkeit in Wellen erfüllt, wenn:
| VPRi > Vs | ||
| hierbei ist: | ||
| VPRi | = | die Referenz-Schiffsgeschwindigkeit (m/s), die den parametrischen Resonanzbedingungen entspricht, wenn GM( Hi, λi) > 0: |
 | ||
| GM( Hi, λi) | = | wie in Absatz 2.5.3.2.1 definiert (m); |
| λi | = | die in Absatz 2.5.3.2.3 angegebene Wellenlänge (m); |
| | | | = | die Absolutwertoperation. |
2.5.3.2.3 Die angegebenen Wellenfälle für die Bewertung der in den Absätzen 2.5.3.2.1 und 2.5.3.2.2 enthaltenen Anforderungen sind in Tabelle 2.5.3.2.3 dargestellt. In Tabelle 2.5.3.2.3 sind Wi, Hi und λi wie in Abschnitt 2.5.3.2 definiert.
Tabelle 2.5.3.2.3 Wellenfälle für die Bewertung des parametrischen Rollens
| Nummer des Wellenfalls | Gewichtungs- faktor Wi | Wellenlänge λi (m) | Wellenhöhe Hi (m) |
| 1 | 0,000013 | 22,574 | 0,350 |
| 2 | 0,001654 | 37,316 | 0,495 |
| 3 | 0,020912 | 55,743 | 0,857 |
| 4 | 0,092799 | 77,857 | 1,295 |
| 5 | 0,199218 | 103,655 | 1,732 |
| 6 | 0,248788 | 133,139 | 2,205 |
| 7 | 0,208699 | 166,309 | 2,697 |
| 8 | 0,128984 | 203,164 | 3,176 |
| 9 | 0,062446 | 243,705 | 3,625 |
| 10 | 0,024790 | 287,931 | 4,040 |
| 11 | 0,008367 | 335,843 | 4,421 |
| 12 | 0,002473 | 387,440 | 4,769 |
| 13 | 0,000658 | 442,723 | 5,097 |
| 14 | 0,000158 | 501,691 | 5,370 |
| 15 | 0,000034 | 564,345 | 5,621 |
| 16 | 0,000007 | 630,684 | 5,950 |
2.5.3.2.4 Bei der Berechnung von δGM( Hi, λi) und GM( Hi, λi)nach Absatz 2.5.3.2.1 soll der Wellenkamm mittschiffs und bei 0,1 λi, 0,2 λi, 0,3 λi, 0,4 λi und 0,5 λi nach vorn und bei 0,1 λi, 0,2 λi, 0,3 λi und 0,4 λi nach achtern liegen.
2.5.3.3 Der Wert von C2 wird als Mittelwert der Werte von C2( Fni, βi), von denen jeder ein gewichteter Mittelwert aus der in Absatz 2.5.3.4.2 angegebenen Reihe von Wellen ist, für jeden angegebenen Satz von Froude-Zahlen und Wellenrichtungen berechnet:
| C2 | = |  |
| hierbei ist: | = | |
| C2( Fni, βh) | = | C2( Fn, β) berechnet entsprechend Absatz 2.5.3.3.1, wobei das Schiff in Wellen von vorn mit einer Geschwindigkeit von Vi fährt; |
| C2( Fni, βf) | = | C2( Fn, β) berechnet entsprechend Absatz 2.5.3.3.1, wobei das Schiff in Wellen von achtern mit einer Geschwindigkeit von Vi fährt; |
| Fni | = | Vi / √ Lg, Froude-Zahl entsprechend der Schiffsgeschwindigkeit Vi; |
| Vi | = | Vs ⋅ Ki, Schiffsgeschwindigkeit (m/s); und |
| Ki | = | aus Tabelle 2.5.3.3 zu entnehmen. |
Tabelle 2.5.3.3 Geschwindigkeitsfaktor Ki
| i | Ki |
| 1 | 1,0 |
| 2 | 0,991 |
| 3 | 0,966 |
| 4 | 0,924 |
| 5 | 0,866 |
| 6 | 0,793 |
| 7 | 0,707 |
| 8 | 0,609 |
| 9 | 0,500 |
| 10 | 0,383 |
| 11 | 0,259 |
| 12 | 0,131 |
2.5.3.3.1 Die gewichteten Kriterien C2( Fni, β) werden als gewichteter Mittelwert des kurzfristigen Fehlerindexes des parametrischen Rollens unter Berücksichtigung der in Absatz 2.5.3.4.2 angegebenen Wellen für eine bestimmte Froude-Zahl und Wellenrichtung wie folgt berechnet:
| C2( Fni, βh) | = |  |
| hierbei ist: | ||
| Wi | = | Gewichtungsfaktor für die jeweiligen in Absatz 2.5.3.4.2 genannten Wellenfälle; |
| CS,i | = | 1, wenn der entsprechend Absatz 2.5.3.4 ermittelte maximale Rollwinkel 25 Grad überschreitet, und |
| = | 0, in allen anderen Fällen; | |
| N | = | Gesamtzahl der Wellenfälle, für die der maximale Rollwinkel für eine Kombination von Geschwindigkeit und Kurs bewertet wird. |
2.5.3.4 Der maximale Rollwinkel in Wellen von vorn und von achtern wird, wie in Absatz 2.5.3.4.1 empfohlen, für jede in Absatz 2.5.3.3 definierte Geschwindigkeit Vi bewertet. Für jede Bewertung soll bei der Berechnung der Stabilität in Wellen davon ausgegangen werden, dass das Schiff in Bezug auf Eintauchung und Trimm auf einer Reihe von Wellen mit den folgenden Merkmalen im Gleichgewicht ist:
Wellenlänge λ = L;
Wellenhöhe hj = 0,01 - jL, hierbei ist j = 0,1,...,10.
Für jede Wellenhöhe hj wird der maximale Rollwinkel ermittelt.
2.5.3.4.1 Die Bewertung des Rollwinkels soll unter Verwendung des zeitabhängigen Simulationsverfahrens (time domain simulation method) mit in Wellen berechneten GZ durchgeführt werden.
2.5.3.4.2 Wi ergibt sich aus dem Wert in Tabelle 2.7.2.1.2 geteilt durch die Anzahl der in der Tabelle angegebenen Beobachtungen. Jede Zelle der Tabelle entspricht einer durchschnittlichen Nulldurchgangs-Wellenperiode Tz und einer signifikanten Wellenhöhe Hs. Mit diesen beiden Werten soll eine repräsentative Wellenhöhe Hri durch Filterung von Wellen (mit bestimmten Werten) innerhalb der Schiffslänge berechnet werden. Der maximale Rollwinkel, welcher der repräsentativen Wellenhöhe Hri entspricht, wird durch lineare Interpolation der in Absatz 2.5.3.4 ermittelten maximalen Rollwinkel für verschiedene Wellenhöhen hj ermittelt. Dieser maximale Rollwinkel soll für die Ermittlung von CS,i in Absatz 2.5.3.3.1 verwendet werden.
2.6 Bewertung der Anfälligkeit des Schiffes für den Versagensmodus "Wellenreiten/Querschlagen"
2.6.1 Anwendung
2.6.1.1 Für jeden Ladefall:
- gilt ein Schiff, das die in den Kriterien des Abschnitts 2.6.2 enthaltenen Standards erfüllt, als nicht anfällig für den Versagensmodus "Wellenreiten/Querschlagen";
- ist ein Schiff, das die in den Kriterien des Abschnitts 2.6.2 enthaltenen Standards nicht erfüllt,
- entweder den Manövrierverfahren des Schiffes zur Vermeidung gefährlicher Zustände beim Wellenreiten/Querschlagen, wie in Abschnitt 4.2.1 der Revised guidance to the master for avoiding dangerous situations in adverse weather and sea conditions (MSC.1/Circ.1228) empfohlen, vorbehaltlich der Zulassung durch die Verwaltung zu unterziehen;
- oder einer detaillierteren Bewertung der Anfälligkeit für den Versagensmodus "Wellenreiten/Querschlagen" unter Anwendung der in Abschnitt 2.6.3 enthaltenen Kriterien zu unterziehen.
2.6.1.2 Alternativ zu den in den Abschnitten 2.6.2 oder 2.6.3 enthaltenen Kriterien kann ein Schiff für jeden Ladefall entweder:
- einer direkten Stabilitätsbewertung für den Versagensmodus "Wellenreiten/Querschlagen", die entsprechend den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 durchgeführt wird, unterzogen werden; oder
- betrieblichen Maßnahmen unterliegen, die auf den Richtlinien für betriebliche Maßnahmen in Kapitel 4 basieren.
2.6.1.3 Eine ausführliche Bewertung der Anfälligkeit der Stufe 2 entsprechend den in Abschnitt 2.6.3 enthaltenen Kriterien kann durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.6.2 durchzuführen. Gleichermaßen kann eine detaillierte direkte Stabilitätsbewertung entsprechend Absatz 2.6.1.3.1 durchgeführt werden, ohne die Anforderung, eine vereinfachtere Bewertung nach Abschnitt 2.6.2 oder Abschnitt 2.6.3 durchzuführen.
2.6.1.4 Für Schiffe, die den in Abschnitt 2.6.2 enthaltenen Standard nicht erfüllen und die das MSC.1/Circ.1228 nicht entsprechend des vorstehenden Absatzes 2.6.1.1 anwenden, sind relevante, vereinbarte Sicherheitsinformationen entsprechend den in Abschnitt 2.6.3 dieser Richtlinien, den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 oder den Richtlinien für betriebliche Maßnahmen in Kapitel 4 enthaltenen Kriterien bereitzustellen.
2.6.1.5 Die bei der Bewertung zu verwendenden Referenz-Umgebungsverhältnisse können entsprechend den Richtlinien für betriebliche Maßnahmen in Kapitel 4 geändert werden.
2.6.2 Anfälligkeitskriterium der Stufe 1 für den Versagensmodus "Wellenreiten/Querschlagen"
2.6.2.1 Ein Schiff wird nicht als anfällig für den Versagensmodus "Wellenreiten/Querschlagen" angesehen, wenn
- L ≥ 200 m; oder
- Fn ≤ 0,3.
2.6.3 Anfälligkeitskriterium der Stufe 2 für den Versagensmodus "Wellenreiten/Querschlagen"
Ein Schiff wird nicht als anfällig für den Versagensmodus "Wellenreiten/Querschlagen" angesehen, wenn
| C ≤ RSR | ||
| hierbei ist: | ||
| RSR | = | 0,005; |
| C | = | entsprechend Absatz 2.6.3.2 berechnetes Kriterium. |
2.6.3.2 Der Wert von C wird wie folgt berechnet:
| C | = |  |
| hierbei ist: | ||
| W2( HS, TZ) | = | Gewichtungsfaktor des kurzzeitigen Seegangs entsprechend Absatz 2.7.2.1 als Funktion der signifikanten Wellenhöhe HS und der Nulldurchgangs-Wellenperiode TZ, wobei W2( HS, TZ) gleich der Anzahl der Ereignisse der Kombination geteilt durch die Gesamtanzahl der Ereignisse in der Tabelle ist und dem in Abschnitt 2.7.2 vorgegebenen Faktor Wi entspricht; |
| wij | = | statistisches Gewicht einer Welle entsprechend Absatz 2.6.3.3 mit der Steilheit ( H/ λ) j und dem Verhältnis von Wellenlänge zu Schiffslänge (λ/ L) i, berechnet mit der gemeinsamen Verteilung der lokalen Wellensteilheit und Wellenlänge, d. h. mit der vorgegebenen Diskretisierung Nλ = 80 und Na = 100; und |
| C2ij | = | der in Absatz 2.6.3.4 vorgegebene Koeffizient. |
2.6.3.3 Der Wert wij soll unter Verwendung der folgenden Formel berechnet werden:
| wij | = |  |
| hierbei ist: | ||
| πv | = | 0,425; |
| T01 | = | 1,086 Tz; |
| sj | = | ( H/ λ) j = Wellensteilheit, variierend von 0,03 bis 0,15 mit einem Inkrement Δs = 0,0012; und |
| ri | = | ( λ/ L) i = Verhältnis der Wellenlänge zur Schiffslänge, variierend von 1,0 bis 3,0 mit einem Inkrement Δr = 0,025. |
2.6.3.4 Der Wert C2ij wird für jede Welle wie folgt berechnet:
| C2ij | = |  | 1 wenn Fn > Fncr (rj, si) |
| 0 wenn Fn ≤ Fncr (rj, si) | |||
| hierbei ist: | |||
| Fncr | die kritische Froude-Zahl, die dem Schwellenwert des Wellenreitens (das Wellenreiten tritt unter beliebigen Ausgangsbedingungen auf) entspricht und entsprechend Absatz 2.6.3.4.1 für die regelmäßige Welle mit der Steilheit sj und dem Verhältnis der Wellenlänge zu Schiffslänge ri zu berechnen ist. | ||
2.6.3.4.1 Die kritische Froude-Zahl Fncr wird berechnet als
Fncr = ucr / √Lg,
wobei die kritische nominale Schiffsgeschwindigkeit ucr (m/s) entsprechend Absatz 2.6.3.4.2 bestimmt wird.
2.6.3.4.2 Die kritische nominale Schiffsgeschwindigkeit ucr wird durch Lösen der folgenden Gleichung mit den kritischen Antriebsdrehzahlen (Propellerdrehzahlen) ncr bestimmt
| Te( ucr; ncr) - R( ucr) = 0 | ||
| hierbei ist: | ||
| R( ucr) | = | Widerstand des Schiffes in ruhigem Wasser (N) bei der Schiffsgeschwindigkeit von ucr, siehe Absatz 2.6.3.4.3; |
| Te( ucr; ncr) | = | Schub (N), der vom Antrieb bzw. den Antrieben des Schiffes in ruhigem Wasser abgegeben wird, bestimmt entsprechend Absatz 2.6.3.4.4; und |
| ncr | = | angeordnete Drehzahl des Antriebs bzw. der Antriebe (1/s), die dem Schwellenwert des Wellenreitens (das Wellenreiten tritt unter beliebigen Ausgangsbedingungen auf) entspricht, siehe Absatz 2.6.3.4.6. |
2.6.3.4.3 Der Widerstand in ruhigem Wasser R(u) wird auf der Grundlage verfügbarer Daten mit einem Näherungspolynom angenähert, das geeignet ist, die Eigenschaften des Widerstands für das betreffende Schiff darzustellen. Die Annäherung soll geeignet sein sicherzustellen, dass der Widerstand als Funktion der Geschwindigkeit in dem entsprechenden Bereich kontinuierlich ansteigt.
2.6.3.4.4 Für ein Schiff, das einen Propeller als Hauptantrieb verwendet, kann der Antriebsschub Te( u; n) in ruhigem Wasser durch ein Polynom zweiten Grades angenähert werden:
| Te( u;n) | = |  |
| hierbei ist: | ||
| u | = | Geschwindigkeit des Schiffes (m/s) in ruhigem Wasser; |
| n | = | angeordnete Drehzahl des Antriebs (1/s); |
| tp | = | ungefährer Schubabzugsfaktor; |
| wp | = | ungefähre Nachstromziffer; |
| κ0, κ1, κ2 | = | Näherungskoeffizienten für den angenäherten Propellerschubkoeffizienten in ruhigem Wasser; |
| J | = | u(1 - wp)/ nDp = Vorschubverhältnis |
Im Fall eines Schiffes mit mehreren Propellern kann der Gesamtschub durch Summierung der Wirkung der einzelnen Propeller, die wie oben beschrieben berechnet wurden, berechnet werden.
Bei einem Schiff, das einen anderen Antrieb bzw. andere Antriebe als einen Propeller bzw. mehrere Propeller verwendet, ist der Antriebsschub nach einer für den verwendeten Antriebstyp geeigneten Methode zu ermitteln.
2.6.3.4.5 Die Amplitude der welleninduzierten Längskraft für jede Welle wird berechnet als
| fij | = |  |
| hierbei ist: | ||
| ki | = | Wellenzahl = 2π/ riL (1/m) |
| Hij | = | Wellenhöhe = sj ri L (m); |
| sj, ri | = | wie in Absatz 2.6.3.3 definiert; |
 | = |  |
 | = |  |
| und sind Teile der Froude-Krylov-Komponente der welleninduzierten Längskraft (m) | ||
| xm | = | Längsabstand von der Mitte des Schiffes zu einer Längsposition (m), positiv für einen Bugabschnitt; |
| δxm | = | Länge des zur Längsposition m gehörenden Schiffsstreifens (m); |
| d( xm) | = | Tiefgang an der Längsposition m in ruhigem Wasser (m); |
| S( xm) | = | Fläche des eingetauchten Teils des Schiffes an der Längsposition m in ruhigem Wasser (m2); |
| N | = | Anzahl der Längspositionen; und |
| m | = | Index einer Längsposition. |
2.6.3.4.6 Die kritische Anzahl der Drehzahl des Antriebs, die dem Schwellenwert des Wellenreitens ncr (rj, si) entspricht, kann durch Lösen der folgenden quadratischen Gleichung bestimmt werden:
 | ||
| hierbei ist: | ||
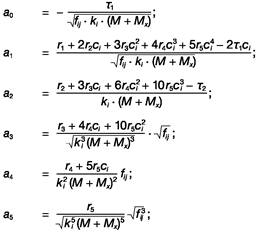 | ||
| r1, r2, r3, r4, r5 = Regressionskoeffizienten für den Widerstand in ruhigem Wasser bei einem Näherungspolynom des fünften Grades R( u) ≈ r1u + r2u2 + r3u3 + r4u4 + r5u5. | ||
| M | = | Masse des Schiffes (kg); |
| Mx | = | zusätzliche Masse des Schiffes beim Abreiten (kg). Liegen keine schiffsspezifischen Daten vor, kann Mx mit 0,1 M angenommen werden; |
| ci | = | √( g/ ki) = Wellenfortschrittsgeschwindigkeit (m/s); |
| τ1 | = | κ1(1 - tp) (1 - wp) ρDρ3 |
| τ2 | = | κ2(1 - tp) (1 - wp)2 ρDρ2 |
2.7 Gemeinsame Parameter zur Bewertung der Versagensmodi der Stabilität
2.7.1 Trägheitseigenschaften eines Schiffes und natürliche Periode der Rollbewegung
2.7.1.1 Sollten keine direkten Berechnungen vorliegen, kann das Rollträgheitsmoment des Schiffes, das die Wirkung der zusätzlichen Trägheit JT,roll umfasst, wie folgt geschätzt werden:

2.7.1.2 Sollten keine ausreichenden Informationen, keine direkte Berechnung oder Messung vorliegen, kann die natürliche Rollperiode Tr bei einem gegebenen Ladefall unter Verwendung der Formeln in Abschnitt 2.3 Teil A des IS-Codes 2008 angenähert werden, die im Folgenden wiederholt wird,
| Tr | = |  | , hierbei ist C = 0,373 + 0,023 (B / d) - 0,043 (LWL / 100), |
oder Alternativen zu diesen.
2.7.2 Daten der Umgebung
2.7.2.1 Es wird von einer Reihe von Standard-Umgebungsverhältnissen ausgegangen. Die Charakterisierung der Standard-Umgebungsverhältnissen bezieht sich sowohl auf den kurzzeitigen als auch auf den langzeitigen Bereich. Die Kurzzeitcharakterisierung erfolgt anhand des Spektrums der Höhe über dem Meeresspiegel, der so genannten Spektraldichte des Meereswellenhubs. Die Langzeitcharakterisierung wird in Form einer Tabelle der Wellenstreuung angegeben. Die standardmäßigen Kurzzeit- und Langzeitcharakterisierungen sind in Absatz 2.7.2.1.1 bzw. Absatz 2.7.2.1.2 angegeben.
2.7.2.1.1 Die Spektraldichte des Meereswellenhubs Szz(ω) wird durch das Bretschneider-Wellenenergiespektrum als Funktion der Wellenfrequenz ω wie folgt bestimmt:

2.7.2.1.2 Die Langzeitcharakterisierung der Standard-Umgebungsverhältnisse (bei uneingeschränktem Betrieb) wird mithilfe einer Tabelle der Wellenstreuung angegeben. Die Tabelle der Wellenstreuung enthält die Anzahl der Ereignisse Wi in jedem Bereich der signifikanten Wellenhöhe Hs und der Nulldurchgangs-Wellenperiode Tz in 100.000 Beobachtungen. Die Tabelle der Wellenstreuung in Tabelle 2.7.2.1.2 gibt die Faktoren Wi als Funktionen der Werte Hs und Tz an, welche die Mittelwerte der entsprechenden Bereiche darstellen. 7
Tabelle 2.7.2.1.2 - Tabelle der Wellenstreuung
| Anzahl der Ereignisse: 100.000 / Tz (s) = mittlere Nulldurchgangs-Wellenperiode / Hs (m) = signifikante Wellenhöhe | ||||||||||||||||
| Tz (s) => | 3,5 | 4,5 | 5,5 | 6,5 | 7,5 | 8,5 | 9,5 | 10,5 | 11,5 | 12,5 | 13,5 | 14,5 | 15,5 | 16,5 | 17,5 | 18,5 |
| (Hs (m) ⇓ | ||||||||||||||||
| 0,5 | 1,3 | 133,7 | 865,6 | 1186,0 | 634,2 | 186,3 | 36,9 | 5,6 | 0,7 | 0,1 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 |
| 1,5 | 0,0 | 29,3 | 986,0 | 4976,0 | 7738,0 | 5569,7 | 2375,7 | 703,5 | 160,7 | 30,5 | 5,1 | 0,8 | 0,1 | 0,0 | 0,0 | 0,0 |
| 2,5 | 0,0 | 2,2 | 197,5 | 2158,8 | 6230,0 | 7449,5 | 4860,4 | 2066,0 | 644,5 | 160,2 | 33,7 | 6,3 | 1,1 | 0,2 | 0,0 | 0,0 |
| 3,5 | 0,0 | 0,2 | 34,9 | 695,5 | 3226,5 | 5675,0 | 5099,1 | 2838,0 | 1114,1 | 337,7 | 84,3 | 18,2 | 3,5 | 0,6 | 0,1 | 0,0 |
| 4,5 | 0,0 | 0,0 | 6,0 | 196,1 | 1354,3 | 3288,5 | 3857,5 | 2685,5 | 1275,2 | 455,1 | 130,9 | 31,9 | 6,9 | 1,3 | 0,2 | 0,0 |
| 5,5 | 0,0 | 0,0 | 1,0 | 51,0 | 498,4 | 1602,9 | 2372,7 | 2008,3 | 1126,0 | 463,6 | 150,9 | 41,0 | 9,7 | 2,1 | 0,4 | 0,1 |
| 6,5 | 0,0 | 0,0 | 0,2 | 12,6 | 167,0 | 690,3 | 1257,9 | 1268,6 | 825,9 | 386,8 | 140,8 | 42,2 | 10,9 | 2,5 | 0,5 | 0,1 |
| 7,5 | 0,0 | 0,0 | 0,0 | 3,0 | 52,1 | 270,1 | 594,4 | 703,2 | 524,9 | 276,7 | 111,7 | 36,7 | 10,2 | 2,5 | 0,6 | 0,1 |
| 8,5 | 0,0 | 0,0 | 0,0 | 0,7 | 15,4 | 97,9 | 255,9 | 350,6 | 296,9 | 174,6 | 77,6 | 27,7 | 8,4 | 2,2 | 0,5 | 0,1 |
| 9,5 | 0,0 | 0,0 | 0,0 | 0,2 | 4,3 | 33,2 | 101,9 | 159,9 | 152,2 | 99,2 | 48,3 | 18,7 | 6,1 | 1,7 | 0,4 | 0,1 |
| 10,5 | 0,0 | 0,0 | 0,0 | 0,0 | 1,2 | 10,7 | 37,9 | 67,5 | 71,7 | 51,5 | 27,3 | 11,4 | 4,0 | 1,2 | 0,3 | 0,1 |
| 11,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,3 | 3,3 | 13,3 | 26,6 | 31,4 | 24,7 | 14,2 | 6,4 | 2,4 | 0,7 | 0,2 | 0,1 |
| 12,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,1 | 1,0 | 4,4 | 9,9 | 12,8 | 11,0 | 6,8 | 3,3 | 1,3 | 0,4 | 0,1 | 0,0 |
| 13,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,3 | 1,4 | 3,5 | 5,0 | 4,6 | 3,1 | 1,6 | 0,7 | 0,2 | 0,1 | 0,0 |
| 14,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,1 | 0,4 | 1,2 | 1,8 | 1,8 | 1,3 | 0,7 | 0,3 | 0,1 | 0,0 | 0,0 |
| 15,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,1 | 0,4 | 0,6 | 0,7 | 0,5 | 0,3 | 0,1 | 0,1 | 0,0 | 0,0 |
| 16,5 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,1 | 0,2 | 0,2 | 0,2 | 0,1 | 0,1 | 0,0 | 0,0 | 0,0 |
2.7.2.2 Für Schiffe, die betrieblichen Maßnahmen entsprechend Kapitel 4 unterliegen, können alternative Umgebungsverhältnisse angewendet werden und sind von der Verwaltung anzuerkennen.
2.7.2.2.1 Diese alternativen Umgebungsverhältnisse sollen die kurzzeitigen Merkmale von Wind und Seegang zusammen mit der Wahrscheinlichkeit des Auftretens jedes kurzzeitigen Umgebungsverhältnisses angeben.
2.7.2.2.2 Die kurzzeitigen Seegangsmerkmale sind in Form eines Spektrums des Wellenhubs anzugeben. Der kurzzeitige Windzustand ist in Form einer mittleren Windgeschwindigkeit und eines Böenspektrums anzugeben.
2.7.2.2.3 Die langzeitige Charakterisierung der Umgebungsverhältnisse ist in Form der Wahrscheinlichkeit des Auftretens jedes einzelnen der Kurzzeitzustände anzugeben. Die Wahrscheinlichkeit des Auftretens jedes einzelnen kurzzeitigen Umgebungsverhältnisses entspricht dem Gewichtungsfaktor Wi. Die Reihe der kurzzeitigen Umgebungsverhältnisse und die entsprechenden Gewichtungsfaktoren sind so auszuwählen, dass die Summe der Gewichtungsfaktoren, d. h. die Eintrittswahrscheinlichkeiten, gleich eins ist.
2.7.3 Andere gebräuchliche Parameter
2.7.3.1 Wirksame Mittel zur Bewegungsreduzierung, wie beispielsweise aktive Flossenstabilisatoren und Tankstabilisatoren können Rollbewegungen im Seegang erheblich reduzieren. Die Sicherheit des Schiffes hat jedoch im Falle eines Versagens dieser Einrichtungen gewährleistet zu sein, weshalb die Bewertung der Anfälligkeit entsprechend diesen Vorläufigen Richtlinien bei inaktiven oder eingeklappten Einrichtungen, sofern sie einklappbar sind, durchzuführen ist.
3 Richtlinien für die direkte Bewertung des Stabilitätsversagens
3.1 Zielsetzung
3.1.1 Diese Richtlinien stellen Anforderungen für direkte Stabilitätsbewertungsverfahren zu den folgenden Stabilitätsversagensmodi zur Verfügung:
- Totalausfalls des Schiffes;
- Übermäßige Beschleunigung;
- Totaler Stabilitätsverlust;
- Parametrisches Rollen; und
- Wellenreiten/Querschlagen.
3.1.2 Die in diesen Richtlinien empfohlenen Kriterien, Verfahren und Standards gewährleisten ein Sicherheitsniveau, bei dem die durchschnittliche Stabilitätsversagensrate 2,6 ⋅ 10-3 pro Schiff und Jahr nicht übersteigt.
3.1.3 Die Verfahren zur direkten Stabilitätsbewertung sind dafür vorgesehen, den neuesten Stand der Technik zu nutzen und gleichzeitig so praktikabel zu sein, dass sie mit der derzeit verfügbaren Infrastruktur einheitlich Akzeptanz finden und angewendet werden können.
3.1.4 Die nachstehenden Anforderungen gelten für alle Schiffe und alle Versagensmodi. Die Vorgaben für die beiden Versagensmodi "Totalausfalls des Schiffes" und "Totaler Stabilitätsverlust" gelten jedoch nicht für Schiffe mit einem ausgedehnten niedrigliegenden Wetterdeck.
3.2 Anforderungen
3.2.1 Das Versagensereignis wird definiert als
- Überschreitung des Rollwinkels, definiert als 40 Grad, Kenterwinkel in ruhigem Wasser oder Winkel des Eintauchens ungeschützter Öffnungen in ruhigem Wasser, je nachdem, welcher Wert kleiner ist; oder
- Überschreitung der Querbeschleunigung von 9,81 m/s an der höchsten Stelle entlang der Länge des Schiffes, an der sich Fahrgäste oder Besatzungsmitglieder aufhalten können.
Die Verwaltungen können strengere Anforderungen festlegen, wenn sie dies für erforderlich halten.
3.2.2 Wirksame Mittel zur Bewegungsreduzierung, wie beispielsweise aktive Flossenstabilisatoren und Tankstabilisatoren, können Rollbewegungen im Seegang erheblich reduzieren. Die Sicherheit des Schiffes soll jedoch im Falle eines Versagens dieser Einrichtungen gewährleistet sein, weshalb die Bewertung der Anfälligkeit entsprechend diesen Vorläufigen Richtlinien bei inaktiven oder eingeklappten Einrichtungen, sofern sie einklappbar sind, durchgeführt werden soll.
3.2.3 Das Verfahren zur direkten Stabilitätsbewertung besteht aus zwei Hauptkomponenten:
- ein Verfahren, das die Schiffsbewegungen im Wellengang angemessen nachbildet (siehe Abschnitt 3.3); und
- ein vorgeschriebenes Verfahren, das angibt, wie die Eingabewerte für die Bewertung gewonnen, die Ausgabewerte verarbeitet und die Ergebnisse bewertet werden (siehe Abschnitt 3.5).
3.3 Anforderungen für ein Verfahren, das Schiffsbewegungen angemessen prognostiziert
3.3.1 Allgemeine Erwägungen
3.3.1.1 Die Bewegung von Schiffen in Wellen kann durch numerische Simulationen oder Modellversuche prognostiziert werden.
3.3.1.2 Die Wahl zwischen numerischen Simulationen, Modellversuchen oder deren Kombination ist von Fall zu Fall mit der Verwaltung unter Berücksichtigung dieser Vorläufigen Richtlinien abzustimmen.
3.3.1.3 Die Verfahren, die Kalibrierungen und die ordnungsgemäße Anwendung der Technologie bei der Durchführung von Modellversuchen sollen den "Recommended Procedures, Model Tests on Intact Stability, 7.5-02-07-04.1" der International Towing Tank Conference (ITTC) aus dem Jahr 2008 entsprechen. Die Benutzer können zum Zeitpunkt der Durchführung der Versuche die jüngste geänderte Fassung der empfohlenen Verfahren befolgen, wenn dies für erforderlich gehalten wird.
3.3.1.4 Die numerische Simulation von Schiffsbewegungen kann definiert werden als die numerische Lösung der Bewegungsgleichungen eines Schiffes, das im Wellengang fährt, einschließlich oder ausschließlich der Wirkung des Windes (siehe Abschnitt 3.3.2).
3.3.2 Allgemeine Anforderungen
3.3.2.1 Modellierung von Wellen
3.3.2.1.1 Das mathematische Modell der Wellen soll logisch und für die Berechnung der Kräfte geeignet sein.
3.3.2.1.2 Die Modellierung unregelmäßiger Wellen soll statistisch und hydrodynamisch valide sein. Es ist darauf zu achten, dass ein Selbstwiederholungseffekt vermieden wird.
3.3.2.2 Modellierung der Rolldämpfung: Vermeidung von Doppelung
3.3.2.2.1 Die Rolldämpfungskräfte sollen Wellen-, Auftriebs-, Wirbel- (d. h. Wirbelbildung) und Außenhautreibungskomponenten umfassen.
3.3.2.2.2 Die für die Kalibrierung der Rolldämpfung zu verwendenden Daten können bestimmt werden mithilfe von:
- einem Versuch zum Abklingen der Rollbewegung (roll decay test) oder einem erzwungenen Rollversuch (forced roll test);
- CFD-Berechnungen (Computational-Fluid-Dynamics-Berechnungen), wenn eine ausreichende Übereinstimmung mit den experimentellen Ergebnissen in Bezug auf die Rolldämpfung nachgewiesen wird;
- bestehenden Datenbanken mit Messungen oder CFD-Berechnungen für ähnliche Schiffe, sofern ein geeigneter Wertebereich verfügbar ist; oder
- empirischen Formeln, die innerhalb der Grenzen ihrer Anwendbarkeit angewendet werden.
3.3.2.2.3 Wenn die Wellenkomponente der Rolldämpfung bereits in die Berechnung der Strahlungskräfte einbezogen ist, sollen Maßnahmen getroffen werden, um zu vermeiden, dass diese Effekte mehrfach berücksichtigt werden.
3.3.2.2.4 Wenn ferner Komponenten der Rolldämpfung (z.B. Querströmungswiderstand) direkt berechnet werden, während andere den Kalibrierungsdaten entnommen werden, sind ähnliche Maßnahmen zu treffen, um diese direkt berechneten Elemente aus den verwendeten Kalibrierungsdaten auszuschließen.
3.3.2.2.5 Eine mehrmalige Einbeziehung der wesentlichen Elemente der Rolldämpfung kann durch ein sich wiederholendes (iteratives) Kalibrierungsverfahren vermieden werden, bei dem die Versuche zum Abklingen der Rollbewegung oder erzwungenen Rollversuche in numerischen Simulationen repliziert werden. Die Ergebnisse sind so zu ermitteln, dass sie dem Datensatz des ursprünglichen Kalibrierungsmodellversuchs einigermaßen nahe kommen.
3.3.2.3 Mathematische Modellierung von Kräften und Momenten
3.3.2.3.1 Die Froude-Krylov-Kräfte sind zumindest für die Versagensmodi "Totalausfall des Schiffes", "Totaler Stabilitätsverlust" und "Parametrisches Rollen" unter Verwendung körpergenauer Formulierungen zu berechnen, z.B. unter Verwendung von Flächen- oder Streifentheorieansätzen (panel or striptheory approaches).
3.3.2.3.2 Die Radiations- und Diffraktionskräfte sind auf eine von drei Arten darzustellen: Eine besteht in der Verwendung von Näherungskoeffizienten und die anderen beiden beinhalten entweder eine lineare Körperformulierung oder eine körpergenaue Lösung des entsprechenden Grenzwertproblems.
3.3.2.3.3 Die Widerstandskräfte sollen Wellen-, Wirbel- und Außenhautreibungskomponenten umfassen. Die bevorzugte Quelle für diese Daten ist ein Modellversuch. Der zusätzliche Wellenwiderstand kann angenähert werden, wenn dieses Element nicht bereits in der Berechnung der Radiations- und Diffraktionskräfte enthalten ist. Wenn die Radiations- und Diffraktionskräfte als Lösung des Grenzwertproblems des Schiffskörpers berechnet werden, sind Vorkehrungen zu treffen, um zu vermeiden, dass diese Effekte mehr als einmal berücksichtigt werden.
3.3.2.3.4 Driftkräfte, Rollmomente und Giermomente der hydrodynamischen Reaktion können auf der Grundlage folgender Faktoren angenähert werden:
- Koeffizienten, die aus Modellversuchen in ruhigem Wasser mit planarem Bewegungsmechanismus (planar motion mechanism - PMM) oder in stationären kreisförmigen Versuchen mit einem rotierenden Arm oder einem zweidimensional (x-y) beweglichen Wagen abgeleitet wurden. 8
- CFD-Berechnungen, sofern eine hinreichende Übereinstimmung mit einem Modellversuch hinsichtlich der Werte von Driftkraft und Giermoment nachgewiesen wird. Wenn die Radiations- und Diffraktionskräfte als Lösung des Grenzwertproblems des Schiffskörpers berechnet werden, sind Vorkehrungen zu treffen, um zu vermeiden, dass diese Effekte mehr als einmal berücksichtigt werden.
- Empirische Datenbank oder empirische Formeln, die innerhalb ihres Anwendungsbereichs verwendet werden.
3.3.2.3.5 Der Schub kann mithilfe eines koeffizientenbasierten Modells mit Näherungskoeffizienten ermittelt werden, um die Wechselwirkungen zwischen Propeller und Schiffskörper zu erfassen.
3.3.3 Anforderungen für bestimmte Versagensmodi der Stabilität
3.3.3.1 Für den Versagensmodus "Totalausfall des Schiffes" gilt:
- Schiffsbewegungssimulationen sollen mindestens die folgenden vier Freiheitsgrade umfassen: Driften, Tauchen, Rollen und Stampfen.
- Aerodynamische Dreikomponentenkräfte und -momente, die auf Oberseitenflächen erzeugt werden, können unter Verwendung von Modellversuchsergebnissen bewertet werden. CFD-Ergebnisse können anerkannt werden, wenn eine ausreichende Übereinstimmung mit einem Modellversuch in Bezug auf die Werte der aerodynamischen Kräfte und Momente nachgewiesen wird. Empirische Daten oder Formeln können innerhalb ihres Anwendungsbereichs verwendet werden.
3.3.3.2 Für den Versagensmodus "Übermäßige Beschleunigung" sollen die Simulationen der Schiffsbewegungen mindestens die folgenden drei Freiheitsgrade umfassen: Tauchen, Stampfen und Rollen. Wenn die Driftbewegung nicht modelliert wird, ist eine genaue Wiedergabe der Querbeschleunigung in Betracht zu ziehen.
3.3.3.3 Für den Versagensmodus "Totaler Stabilitätsverlust" sollen die Simulationen der Schiffsbewegungen mindestens die folgenden vier Freiheitsgrade umfassen: Abreiten, Driften, Rollen und Gieren. Für diejenigen Freiheitsgrade, die nicht in der dynamischen Modellierung enthalten sind, ist ein statisches Gleichgewicht anzunehmen.
3.3.3.4 Für den Versagensmodus "Parametrisches Rollen" sollen die Simulationen der Schiffsbewegungen mindestens die folgenden drei Freiheitsgrade umfassen: Tauchen, Rollen und Stampfen.
3.3.3.5 Für den Versagensmodus "Wellenreiten/Querschlagen":
- Simulationen der Schiffsbewegungen sollen mindestens die folgenden vier Freiheitsgrade umfassen: Abreiten, Driften, Rollen und Gieren. Für diejenigen Freiheitsgrade, die nicht in der dynamischen Modellierung enthalten sind, ist statisches Gleichgewicht anzunehmen.
- Hydrodynamische Kräfte aufgrund von Wirbelablösungen am Schiffskörper sollen angemessen modelliert werden. Dies soll hydrodynamische Auftriebskräfte und -momente aufgrund des Zusammentreffens von Wellenpartikelgeschwindigkeit und Schiffsvorausgeschwindigkeit umfassen, mit Ausnahme von Manövrierkräften und -momenten in ruhiger See.
3.3.3.6 Für die Versagensmodi "Totaler Stabilitätsverlust" und "Wellenreiten/Querschlagen" ist ein geeigneter Autopilot zu verwenden.
3.3.3.7 Für die Versagensmodi "Totaler Stabilitätsverlust" und "Wellenreiten/Querschlagen" ist der Anfangszustand mit einer ausreichend kleinen Vorausgeschwindigkeit einzustellen, um künstliches Wellenreiten zu vermeiden, das bei einem Schiff mit Eigenantrieb nicht auftreten kann.
3.4 Anforderungen für die Validierung von Software für die numerische Simulation von Schiffsbewegungen
3.4.1 Validierung
3.4.1.1 Die Validierung ist der Prozess zur Feststellung, inwieweit eine numerische Simulation die reale physikalische Welt aus der Perspektive des jeweiligen Verwendungszwecks des Modells oder der Simulation genau wiedergibt.
3.4.1.2 Verschiedene physikalische Phänomene sind für die unterschiedlichen Versagensmodi der Stabilität verantwortlich. Daher ist die Validierung von Software für die numerische Simulation von Schiffsbewegungen abhängig vom Versagensmodus.
3.4.1.3 Die Validierungsdaten sollen mit den allgemeinen Merkmalen des Schiffes, für das die direkte Stabilitätsbewertung durchzuführen ist, kompatibel sein.
3.4.1.4 Der Validierungsprozess soll in zwei Phasen durchgeführt werden: einer qualitativen und einer quantitativen. In der qualitativen Phase ist das Ziel nachzuweisen, dass die Software in der Lage ist, die relevante Physik des betrachteten Versagensmodus zu reproduzieren. Das Ziel der quantitativen Phase ist es, festzustellen, inwieweit die Software in der Lage ist, den jeweiligen spezifischen Versagensmodus vorherzusagen.
3.4.2 Qualitative Validierungsanforderungen
Tabelle 3.4.2 - Anforderungen und Akzeptanzkriterien für die qualitative Validierung
| Betrachteter Validierungsgegenstand | Erforderlich für | Zielvorgabe | Akzeptanzkriterien |
| Periodische Eigenschaften des Roll-Oszilators | Software zur Berechnung der hydrostatischen und Froude- Krylov-Kräfte mit einem körpergenauen Ansatz | Nachweis der Übereinstimmung zwischen der berechneten Rolleigenfrequenz-Kurve (Abhängigkeit der Rollfrequenz in ruhigem Wasser von der Rollamplitude) und der GZ- Kurve in ruhigem Wasser | Basierend auf der Form der berechneten Rolleigenfrequenz-Kurve. Die Rolleigenfrequenz-Kurve soll einem Trend folgen, der mit dem aufrichtenden Hebelarm übereinstimmt |
| Antwortskurve des Roll-Oszilators | Software zur Berechnung der hydrostatischen und Froude- Krylov-Kräfte mit einem körpergenauen Ansatz | Nachweis der Übereinstimmung zwischen der berechneten Rolleigenfrequenz-Kurve und der berechneten Roll-Antwortskurve (Ab hängigkeit der Amplitude der erregten Rollbewegung von der Frequenz der Erregung) | Basierend auf der Form der Roll-Antwortskurve. Die Roll-Antwortskurve soll die Rolleigenfrequenz-Kurve umgeben und kann eine Hysterese aufweisen, wenn die Amplitude der Erregung erhöht wird |
| Veränderung der Stabilität in Wellen | Software zur Berechnung der hydrostatischen und Froude- Krylov-Kräfte mit einem körpergenauen Ansatz. Zusätzliche Fähigkeit, die momentane GZ-Kurve in Wellen zu verfolgen, kann erforderlich sein | Nachweis der Fähigkeit, den Wellendurchgangseffekt zu reproduzieren | Normalerweise nimmt die Stabilität bei Wellen von vorn und von achtern ab, wenn sich der Wellenkamm in der Nähe des Hauptspantes (innerhalb des Viertels der Länge) befindet, und nimmt die Stabilität zu, wenn sich das Wellental in der Nähe des Hauptspantes (innerhalb des Viertels der Länge) befindet. |
| Hauptsächliche parametrische Resonanz | Software zur Berechnung der hydrostatischen und Froude- Krylov-Kräfte mit einem körpergenauen Ansatz | Nachweis der Fähigkeit zur Reproduktion der hauptsächlichen parametrischen Resonanz | In der Regel wird eine Zunahme und Stabilisierung der Amplitude der Roll-Oszilation bei Seegang genau von achtern oder von vorn beobachtet, wenn die Begegnungsfrequenz etwa das Doppelte der natürlichen Rollfrequenz beträgt. |
| Gleichgewicht beim Wellenreiten | Software für die numerische Simulation des Wellenreitens/Querschlagens | Nachweis der Fähigkeit zur Reproduktion des Wellenreitens, während das Gieren fixiert ist | Einhaltung des Fahrens mit der Geschwindigkeit, die der Wellengeschwindigkeit entspricht, wenn die Propellerdrehzahl auf eine Geschwindigkeit in ruhigem Wasser eingestellt ist, die geringer ist als die Wellengeschwindigkeit. Die horizontale Position des Schwerpunkts wird in der Nähe eines Wellentals erwartet. |
| Krängung während des Drehens | Software für die numerische Simulation des Wellenreitens/Querschlagens | Nachweis der Fähigkeit zur Reproduktion der durch Drehung verursachten Krängung | Beobachtung der Entwicklung des Krängungswinkels während der Drehung |
| Drehen in ruhigem Wasser | Software für die numerische Simulation des Wellenreitens/Querschlagens | Nachweis der korrekten Modellierung von Manövrierkräften | Einhalten der richtigen Drehrichtung bei großen Ruderwinkeln |
| Nicht abweichende Geradeausfahrt in schräg achterlichen Heckwellen | Software für die numerische Simulation des Wellenreitens/Querschlagens | Nachweis der korrekten Modellierung von Wellenkräften, einschließlich der Auswirkung der Teilchengeschwindigkeit des Seegangs | Beobachtung der richtigen Tendenz der Phasendifferenz der Wellenkraft zu den einfallenden Wellen |
| Durch Drift und Wind verursachte Krängung | Software für die numerische Simulation der Schiffsbewegungen bei Totalausfall des Schiffes | Nachweis der Fähigkeit, die Krängung zu reproduzieren, die durch ein Moment verursacht wird, das von der aerodynamischen Belastung erzeugt und dem durch Drift verursachten Widerstand verursacht wird | Beobachtung des sich langsam entwickelnden Krängungswinkels nach Anwendung der aerodynamischen Belastung |
3.4.3 Quantitative Validierungsanforderungen
3.4.3.1 Mit der quantitativen Validierung der numerischen Simulation werden zwei Ziele verfolgt. Das erste besteht darin, das Ausmaß herauszufinden, inwieweit die Ergebnisse der numerischen Simulation von den Ergebnissen der Modellprüfung abweichen. Die Ergebnisse eines entsprechend Absatz 3.3.1.3 durchgeführten Modellversuchs sind als Referenzwerte zu verstehen. Das zweite Ziel besteht darin, zu beurteilen, ob die beobachtete Differenz zwischen Simulationen und Modellversuchen für eine direkte Bewertung der Stabilität, die für die betrachteten Versagensmodi durchzuführen sind, hinreichend gering oder konservativ ist.
Tabelle 3.4.3 - Indikative Anforderungen und Akzeptanzkriterien für die quantitative Validierung
| Betrachteter Validierungsgegenstand | Erforderlich für | Zielvorgabe | Akzeptanzkriterien |
| Antwortskurve für parametrisches Rollen in gleichmäßigen Wellen | Parametrisches Rollen | Nachweis der Übereinstimmung zwischen numerischer Simulation und Modellversuchen hinsichtlich der Amplitude der Rollbewegung | Die maximale (über der Begegnungsfrequenz liegende) Rollamplitude soll um nicht mehr als 10 % unterschritten werden, wenn die Amplitude unter dem Winkel vom maximalen GZ liegt, ansonsten um 20 %. Unterschreitungen von weniger als 2 Grad können unberücksichtigt bleiben. |
| Antwortskurve für synchrones Rollen in gleichmäßigen Wellen | Alle Modi | Nachweis der Übereinstimmung zwischen numerischer Simulation und Modellversuchen hinsichtlich der Amplitude der Rollbewegung | Die maximale (über der Begegnungsfrequenz liegende) Rollamplitude soll um nicht mehr als 10 % unterschritten werden, wenn die Amplitude unter dem Winkel vom maximalen GZ liegt, ansonsten um 20 %. Unterschreitungen von weniger als 2 Grad können unberücksichtigt bleiben. |
| Varianzverifizierung für synchrones Rollen | Software für die numerische Simulation des Totalausfalls des Schiffes und der übermäßigen Beschleunigung | Nachweis der korrekten (statistischen) Modellierung der Rollbewegung bei unregelmäßigen Wellen | Reproduktion von Versuchsergebnissen entweder innerhalb des 95 %-Konfidenzintervalls oder konservativ |
| Varianzverifizierung für parametrisches Rollen | Software für die numerische Simulation des parametrischen Rollens | Nachweis der korrekten (statistischen) Modellierung der Rollbewegung bei unregelmäßigen Wellen | Reproduktion von Versuchsergebnissen entweder innerhalb des 95 %-Konfidenzintervalls oder konservativ |
| Wellenverhältnisse für Wellenreiten und Querschlagen | Software für die numerische Simulation des Wellenreitens/Querschlagens | Nachweis der korrekten Modellierung der Dynamik des Wellenreitens/Querschlagens in regelmäßigen Wellen | Die Steilheit der Wellen, die bei einer Wellenlänge von 0,75 bis 1,5 der Schiffslänge Wellenreiten und Querschlagen verursacht, liegt innerhalb von 15 % der Differenz zwischen Modellversuchen und numerischen Simulationen. Die Geschwindigkeitseinstellungen liegen ebenfalls innerhalb von 15 % der Differenz zwischen Modellversuchen und numerischen Simulationen. |
3.5 Verfahren für eine direkte Stabilitätsbewertung
3.5.1 Allgemeine Beschreibung
3.5.1.1 Die Verfahren zur direkten Stabilitätsbewertung enthalten eine Beschreibung der erforderlichen Berechnungen der Schiffsbewegungen einschließlich der Auswahl der Eingabedaten sowie der Vor- und Nachbearbeitung.
3.5.1.2 Das Verfahren der direkten Stabilitätsbewertung zielt auf die Abschätzung der Wahrscheinlichkeit eines Stabilitätsversagens in einer unregelmäßigen Wellenumgebung ab, und da ein Stabilitätsversagen selten sein kann, kann das Verfahren der direkten Stabilitätsbewertung eine Lösung des Problems der Seltenheit erforderlich machen. Dies tritt auf, wenn die mittlere Zeit bis zum Stabilitätsversagen im Vergleich zur natürlichen Rollperiode, die als Hauptzeitskala für den Rollbewegungsprozess dient, sehr lang ist. Die Lösung des Seltenheitsproblems erfordert hauptsächlich eine statistische Extrapolation; aus diesem Grund soll die Validierung für alle Elemente des Verfahrens der direkten Stabilitätsbewertung durchgeführt werden.
3.5.1.3 Diese Richtlinien bieten zwei allgemeine Ansätze zur Umgehung des Problems der Seltenheit, nämlich die Bewertung in Entwurfssituationen und die Bewertung unter Verwendung deterministischer Kriterien. Es sind mathematische Techniken vorgesehen, welche die erforderliche Anzahl von Simulationen oder die Simulationszeit reduzieren und zur Beschleunigung der Bewertung sowohl für die vollständige Bewertung als auch für die Bewertung in Entwurfssituationen verwendet werden können.
3.5.2 Überprüfung der Versagensmodi
3.5.2.1 Sobald ein Versagen in einer numerischen Simulation identifiziert wird, ist es erforderlich zu prüfen, ob es als ein Versagensmodus angesehen werden kann, für den das numerische Verfahren validiert ist und eine direkte Bewertung vorgesehen ist. Zu diesem Zweck werden im Folgenden die vorgeschlagenen Beurteilungskriterien aufgeführt.
3.5.2.2 Wenn die örtliche Periode der sich ergebenden Rollbewegung in Wellen von achtern oder in schräg achterlichen Heckwellen nahezu gleich der örtlichen Wellenbegegnungsperiode ist und der maximale Rollwinkel nahezu an der relativen Wellenposition auftritt, an der die metazentrische Höhe am kleinsten wird, kann dies als reiner Stabilitätsverlust angesehen werden.
3.5.2.3 Wenn die lokale Periode der sich ergebenden Rollbewegung nahezu das Doppelte der lokalen Wellenbegegnungsperiode beträgt und nahezu gleich der natürlichen Rollperiode des Schiffes ist, kann dies als Versagen der parametrischen Rollstabilität angesehen werden, das in den Anfälligkeitskriterien berücksichtigt wird und manchmal als "parametrisches Hauptrollen" bezeichnet wird. Andere Arten des parametrischen Rollens können mit viel geringerer Wahrscheinlichkeit auftreten und werden von den Kriterien der Intaktstabilität der zweiten Generation nicht berücksichtigt.
3.5.2.4 Der Zustand, in dem das Schiff trotz maximaler Steuerungsbemühungen keinen geraden Kurs halten kann, wird als Querschlagen bezeichnet. Die Kriterien der Intaktstabilität der zweiten Generation befassen sich mit dem Querschlagen im Zusammenhang mit dem Wellenreiten. Andere Arten des Querschlagens können bei niedrigeren Geschwindigkeiten auftreten, werden hier aber nicht berücksichtigt, da die Zentrifugalkraft, die bei solch langsamem Querschlagen entsteht und eine Krängung hervorrufen könnte, wesentlich geringer ist. Das mit dem Wellenreiten verbundene Querschlagen lässt sich daran erkennen, dass sowohl der Gierwinkel als auch die Gierwinkelgeschwindigkeit unter Anwendung des maximalen entgegengesetzten Ruderausschlags mit der Zeit zunehmen.
3.5.2.5 Wenn die lokale Periode der sich ergebenden Rollbewegung in Seitenwellen nahezu gleich der lokalen Wellenbegegnungsperiode ist, kann sie als harmonisches Rollen angesehen werden, was sowohl für den Versagensmodus "Totalausfall des Schiffes" als auch für den Versagensmodus "Übermäßige Beschleunigung" relevant ist.
3.5.3 Umgebungsverhältnisse und Fahrtzustände
3.5.3.1 Allgemeine Vorgehensweisen für die Auswahl von Umgebungsverhältnissen und Fahrtzuständen
3.5.3.1.1 Die für die direkte Stabilitätsbewertung gewählten Seegänge sollen für den vorgesehenen Einsatz des Schiffes repräsentativ sein.
3.5.3.1.2 Die Seegänge werden durch die Art des Wellenspektrums und die statistischen Daten seiner integralen Merkmale, wie die signifikante Wellenhöhe und die mittlere Nulldurchgangs-Wellenperiode, definiert. Bei Schiffen in uneingeschränktem Betrieb ist die Umgebung durch die in Tabelle 2.7.2.1.2 dargestellte Tabelle der Wellenstreuung zu beschreiben. Bei Schiffen in eingeschränktem Betrieb ist die von der Verwaltung anerkannte Tabelle der Wellenstreuung zu verwenden.
3.5.3.1.3 Es wird empfohlen, das Bretschneider-Wellenenergiespektrum (siehe Absatz 2.7.2.1.1) und die Kosinus-Quadrat-Wellenenergieausbreitung in Bezug auf die mittlere Wellenrichtung zu verwenden. Wenn kurzkämmige Wellen in Modellversuchen oder numerischen Simulationen als nicht praktikabel angesehen werden, können langkämmige Wellen verwendet werden.
3.5.3.1.4 Für einen gegebenen Satz von Umgebungsverhältnissen kann die Bewertung unter Verwendung von einer der folgenden gleichwertigen Alternativen durchgeführt werden:
- vollständige probabilistische Bewertung entsprechend Abschnitt 3.5.3.2;
- Bewertung in Entwurfssituationen unter Verwendung von probabilistischen Kriterien entsprechend Abschnitt 3.5.3.3; oder
- Bewertung in Entwurfssituationen unter Verwendung von deterministischen Kriterien entsprechend Abschnitt 3.5.3.4.
3.5.3.2 Vollständige probabilistische Bewertung
3.5.3.2.1 Bei dieser Vorgehensweise wird als Kriterium die Abschätzung der mittleren langzeitigen Rate des Stabilitätsversagens verwendet, die als gewichteter Mittelwert über alle relevanten Seegänge, Wellenrichtungen in Bezug auf den Steuerkurs des Schiffes und die Schiffsvorausgeschwindigkeiten für jeden behandelten Ladefall berechnet wird.
3.5.3.2.2 Um die Anforderungen dieser Bewertung zu erfüllen, soll dieses Kriterium den Standard von 2,6 ⋅ 10-8 (1/s) nicht überschreiten.
3.5.3.2.3 Die Wahrscheinlichkeiten der Seegänge werden entsprechend der Tabelle der Wellenstreuung definiert (siehe Abschnitt 3.5.3.1). Für die Versagensmodi "Übermäßige Beschleunigung", "Totaler Stabilitätsverlust", "Parametrisches Rollen" und "Wellenreiten/Querschlagen" werden die mittleren Wellenrichtungen in Bezug auf den Steuerkurs des Schiffes als gleichmäßig verteilt angenommen, und die Vorausgeschwindigkeit des Schiffes ist als gleichmäßig verteilt zwischen Null und der höchsten Dienstgeschwindigkeit zu betrachten. Beim Versagensmodus "Totalausfall des Schiffes" sind Seitenwellen und -wind anzunehmen, und die Vorausgeschwindigkeit des Schiffes ist mit Null anzunehmen.
3.5.3.3 Bewertung in Entwurfssituationen unter Verwendung von probabilistischen Kriterien
3.5.3.3.1 Im Vergleich zur vollständigen probabilistischen Bewertung reduziert dieser Ansatz die erforderliche Simulationszeit und die Anzahl der Simulationen erheblich, da die Bewertung in weniger Entwurfssituationen durchgeführt wird. Diese Entwurfssituationen werden für jeden Versagensmodus der Stabilität als Kombinationen aus Schiffsvorausgeschwindigkeit, mittlerer Wellenrichtung in Bezug auf den Steuerkurs des Schiffes, signifikanter Wellenhöhe und mittlerer Nulldurchgangs-Wellenperiode für jeden angesprochenen Ladefall angegeben.
3.5.3.3.2 Bei diesem Ansatz ist das Kriterium die maximale Versagensrate der Stabilität (über den Entwurfssituationen, die einem bestimmten Versagensmodus der Stabilität entsprechen), die in jeder Entwurfssituation als die obere Grenze ihres 95 %-Konfidenzintervalls definiert ist.
3.5.3.3.3 Um die Anforderungen dieser Bewertung zu erfüllen, soll dieses Kriterium den Schwellenwert nicht überschreiten, der einem Stabilitätsversagen alle 2 Stunden in Großausführung bei Entwurfsseegängen mit einer Wahrscheinlichkeitsdichte von 10-5 (m ⋅ s)-1 entspricht.
3.5.3.3.4 Tabelle 3.5.3.3.4 zeigt die Entwurfssituationen für bestimmte Versagensmodi der Stabilität, einschließlich der mittleren Wellenrichtung in Bezug auf den Steuerkurs des Schiffes, die Schiffsvorausgeschwindigkeit und den Bereich der Wellenperioden; und der Schritt der Nulldurchgangs-Wellenperiode in den angegebenen Bereichen soll 1,0 s nicht überschreiten.
Tabelle 3.5.3.3.4 - Entwurfssituationen für jeden Versagensmodus der Stabilität
| Versagensmodus der Stabilität | Wellenrichtungen | Vorausgeschwindigkeiten | Wellenperiode |
| Totalausfalls des Schiffes | Seitenwind und Seitenwellen | Null | Tz / Tr von 0,7 bis 1,3 |
| Übermäßige Beschleunigung | Von der Seite | Null | Tz / Tr von 0,7 bis 1,3 |
| Totaler Stabilitätsverlust | Von achtern | Maximale nominelle Dienstgeschwindigkeit | Tp entsprechend den Wellenlängen, die mit der Schiffslänge vergleichbar sind |
| Parametrisches Rollen | Von vorn oder von achtern | Null | Alle Wellenperioden in der Tabelle der Wellenstreuung |
| Wellenreiten/Querschlagen | Von achtern | Maximale nominelle Dienstgeschwindigkeit | Tp entsprechend den Wellenlängen im Bereich von 1,0L bis 1,5L |
3.5.3.3.5 Für jede mittlere Nulldurchgangs-Wellenperiode wird die signifikante Wellenhöhe entsprechend der Wahrscheinlichkeitsdichte des Seegangs entsprechend Absatz 3.5.3.3.3 ausgewählt. Für den uneingeschränkten Betrieb sind die signifikanten Wellenhöhen in Abhängigkeit von der mittleren Nulldurchgangs-Wellenperiode in Tabelle 3.5.3.3.5 angegeben.
Tabelle 3.5.3.3.5 - Signifikante Wellenhöhen für Entwurfsseegänge mit einer Wahrscheinlichkeitsdichte von 10-5 (m ⋅ s)-1 für uneingeschränkten Betrieb
| Tz (s) | 4,5 | 5,5 | 6,5 | 7,5 | 8,5 | 9,5 | 10,5 | 11,5 | 12,5 | 13,5 | 14,5 | 15,5 | 16,5 |
| Hs (m) | 2,8 | 5,5 | 8,2 | 10,6 | 12,5 | 13,8 | 14,6 | 15,1 | 15,1 | 14,8 | 14,1 | 12,9 | 10,9 |
3.5.3.4 Bewertung in Entwurfssituationen unter Verwendung von deterministischen Kriterien
3.5.3.4.1 Eine probabilistische Bewertung kann eine lange Simulationszeit erfordern, selbst wenn Entwurfssituationen verwendet werden, und dies kann die Verwendung von Modellversuchen anstelle von numerischen Simulationen erschweren. Die Anwendung deterministischer Kriterien, wie z.B. die mittlere maximale 3-Stunden-Rollamplitude, kann die erforderliche Simulationszeit verringern, und dies kann die Verwendung von Modellversuchen mit oder anstelle von numerischen Simulationen erleichtern. Die Ungenauigkeit dieses Ansatzes soll jedoch durch zusätzliche Konservativität abgewogen werden.
3.5.3.4.2 Bei diesem Ansatz sind die Kriterien die größte (in Bezug auf alle Entwurfssituationen für einen bestimmten Versagensmodus der Stabilität) mittlere maximale 3-Stunden-Rollamplitude und die Querbeschleunigung für jeden angesprochenen Ladefall.
3.5.3.4.3 Um die Anforderungen dieser Bewertung zu erfüllen, sollen diese Kriterien die Hälfte der Werte in der Definition des Stabilitätsversagens in Abschnitt 3.2.1 nicht überschreiten.
3.5.3.4.4 Die Simulationen oder Modellversuche für jede Entwurfssituation sollen mindestens 15 Stunden in Großausführung umfassen. Diese Zeitdauer kann in mehrere Teile unterteilt werden. Die Ergebnisse sind nachzubearbeiten, um mindestens fünf Werte der maximalen 3-Stunden-Amplitude des Rollwinkels oder der Querbeschleunigung zu erhalten, die gemittelt werden, um die mittleren maximalen 3-Stunden-Amplituden zu bestimmen.
3.5.3.4.5 Bei diesem Ansatz werden Entwurfssituationen mit denselben mittleren Wellenrichtungen in Bezug auf den Steuerkurs des Schiffes, denselben Schiffs-Vorausgeschwindigkeiten und denselben Bereichen der mittleren Nulldurchgangs-Wellenperioden zugrunde gelegt wie bei der Bewertung in Entwurfssituationen unter Verwendung probabilistischer Kriterien (siehe Absatz 3.5.3.3).
3.5.3.4.6 Für jede mittlere Nulldurchgangs-Wellenperiode wird die signifikante Wellenhöhe entsprechend der Wahrscheinlichkeitsdichte des Seegangs von 7 ⋅ 10-5 (m ⋅ s)-1 ausgewählt. Tabelle 3.5.3.4.6 zeigt diese signifikanten Wellenhöhen für den uneingeschränkten Betrieb in Abhängigkeit von der mittleren Nulldurchgangs-Wellenperiode.
Tabelle 3.5.3.4.6 - Signifikante Wellenhöhen, in Metern, für Entwurfsseegänge mit einer Wahrscheinlichkeitsdichte von 7 ⋅ 10-5 (m ⋅ s)-1 für die Bewertung nach deterministischen Kriterien bei uneingeschränktem Betrieb
| Tz (s) | 4,5 | 5,5 | 6,5 | 7,5 | 8,5 | 9,5 | 10,5 | 11,5 | 12,5 | 13,5 | 14,5 | 15,5 |
| Hs (m) | 2,0 | 4,4 | 6,9 | 9,1 | 10,9 | 12,1 | 12,8 | 13,1 | 13,0 | 12,5 | 11,3 | 9,0 |
3.5.4 Direktes Zählverfahren
3.5.4.1 Das direkte Zählverfahren verwendet Schiffsbewegungen, die sich aus mehreren unabhängigen Realisierungen eines unregelmäßigen Seegangs ergeben, um die Rate des Stabilitätsversagens r abzuschätzen.
3.5.4.2 Das für die direkte Zählung verwendete Verfahren soll die obere Grenze des 95 %-Konfidenzintervalls der geschätzten Rate des Stabilitätsversagens liefern. Diese obere Grenze ist diejenige, die bei der direkten Stabilitätsbewertung und den betrieblichen Maßnahmen verwendet wird.
3.5.4.3 Das Zählverfahren hat die Unabhängigkeit der gezählten Ereignisse des Stabilitätsversagens sicherzustellen.
3.5.4.4 Die Versagensrate r und das zugehörige Konfidenzintervall können geschätzt werden:
- indem für jede Realisierung eines unregelmäßigen Seegangs eine Simulation nur bis zum ersten Stabilitätsversagen durchgeführt wird; oder
- auf der Grundlage einer Reihe unabhängiger Simulationen mit festgelegter spezifizierter Expositionszeit texp( s), unter der Annahme, dass die Beziehung zwischen der Wahrscheinlichkeit p des Versagens innerhalb von texp und r (der Versagensrate) p = 1 - exp (- r ⋅ texp) ist.
3.5.4.5 Alternativ zur direkten Zählung können die in Abschnitt 3.5.5 beschriebenen Extrapolationsverfahren verwendet werden.
3.5.5 Extrapolationsverfahren
3.5.5.1 Die im Rahmen dieser Richtlinien zu verwendenden Extrapolationsverfahren sollen nur solche Verfahren umfassen, die erfolgreich validiert und angewendet wurden und die auch eine detaillierte Beschreibung ihrer Anwendung mit einschließen.
3.5.5.2 Vorsichtsmaßnahmen
3.5.5.2.1 Die Extrapolationsmethode kann als Alternative zum direkten Zählverfahren angewendet werden.
3.5.5.2.2 Es ist Vorsicht geboten, weil die Unsicherheit zunimmt, da die Extrapolation mit zusätzlichen Annahmen für die Beschreibung der Schiffsbewegungen in Wellen verbunden ist.
3.5.5.2.3 Die statistische Unsicherheit der extrapolierten Werte ist in Form von Grenzen des Konfidenzintervalls anzugeben, die mit einem Konfidenzniveau von 95 % bewertet werden.
3.5.5.2.4 Zur Beherrschung der durch die Nichtlinearität verursachten Unsicherheit kann das Trennungsprinzip verwendet werden. Extrapolationsmethoden, die auf dem Trennungsprinzip basieren, bestehen aus mindestens zwei numerischen Verfahren, die unterschiedliche Aspekte des Problems behandeln: "nicht selten" und "selten".
3.5.5.2.5 Das Verfahren für "nicht selten" konzentriert sich auf die Abschätzung von Schiffsbewegungen oder Wellen von geringem bis mittlerem Ausmaß, für welche die Stabilitätsversagensereignisse statistisch mit akzeptabler Unsicherheit beschrieben werden können.
3.5.5.2.6 Das Verfahren für "selten" konzentriert sich auf Schiffsbewegungen von mittlerem bis schwerem Ausmaß, für die nur selten numerische Simulationen erforderlich sind. Große Bewegungen können vom Rest der Zeitbereichsdaten getrennt werden, um praktische Schätzungen dieser Bewegungen zu erhalten.
3.5.5.2.7 Verschiedene Extrapolationsmethoden, die auf dem Trennungsprinzip beruhen, können unterschiedliche Annahmen darüber verwenden, wie die Trennung eingebracht wird.
3.5.5.3 Extrapolation über die Wellenhöhe
3.5.5.3.1 Die Extrapolation der mittleren Zeit bis zum Stabilitätsversagen oder der mittleren Rate des Stabilitätsversagens über die signifikante Wellenhöhe ist eine Technik, die es ermöglicht, die erforderliche Simulationszeit zu reduzieren, indem numerische Simulationen oder Modellversuche bei größeren signifikanten Wellenhöhen als den für die Bewertung erforderlichen durchgeführt und die Ergebnisse auf niedrigere signifikante Wellenhöhen extrapoliert werden.
3.5.5.3.2 Die Extrapolation basiert auf der Annäherung ln T = A + B / Hs2, wobei T (s) die mittlere Zeit bis zum Stabilitätsversagen ist, Hs (m) die signifikante Wellenhöhe ist und A, B Koeffizienten sind, die nicht von der signifikanten Wellenhöhe, sondern von den anderen Parametern abhängen, die die Situation spezifizieren (Wellenperiode, Wellenrichtung und Vorausgeschwindigkeit des Schiffes).
3.5.5.3.3 Die Extrapolation kann durchgeführt werden, wenn mindestens drei Werte für die Stabilitätsversagensrate vorliegen. Diese Werte sind durch direkte Zählung für einen Bereich signifikanter Wellenhöhen von mindestens 2 m zu ermitteln. Jeder der in der Extrapolation verwendeten Werte soll der oberen Grenze des 95 %-Konfidenzintervalls der Stabilitätsversagensrate entsprechen und soll 5 % der reziproken natürlichen Rollperiode des Schiffes nicht überschreiten. Die Ergebnisse sind auf das Vorhandensein von Ausreißern und nicht konservativer Extrapolation zu überprüfen und erforderlichenfalls durch Hinzufügen oder Entfernen der für die Extrapolation verwendeten Punkte zu korrigieren.
3.5.5.4 Andere Extrapolationsverfahren
3.5.5.4.1 Unter Berücksichtigung der Abschnitte 3.5.5.1 und 3.5.5.2 sollen andere Extrapolationsverfahren verwendet werden. Zu diesen Verfahren können die nachstehend aufgeführten und andere gehören:
- Envelope-Peakover-Threshold (EPOT);
- Split-Time/Motion-Perturbation-Methode (MPM); und
- Methode der kritischen Wellen.
3.5.6 Validierung von Extrapolationsverfahren
3.5.6.1 Die für die direkte Stabilitätsbewertung verwendeten Extrapolationsverfahren sollen validiert werden.
3.5.6.2 Die Validierung eines Extrapolationsverfahrens ist ein Nachweis, dass der extrapolierte Wert in angemessener statistischer Übereinstimmung mit dem Ergebnis der direkten Zählung steht, sollte eine solche Datenmenge verfügbar sein.
3.5.6.3 Die Daten für die Validierung des Extrapolationsverfahrens können durch ein mathematisches Modell mit reduzierter Komplexität (z.B. ein Satz gewöhnlicher Differenzialgleichungen anstelle einer numerischen Lösung eines Grenzwertproblems) oder durch Ausführen des vollständigen mathematischen Modells unter wesentlich heftigeren Umgebungsverhältnissen und/oder schwereren Ladefällen erzeugt werden. Ziel ist es, den rechnerischen Zeitaufwand zu senken, damit ein großer Datensatz (der Validierungsdatensatz) erhalten werden kann. Physikalische Experimente können für den gleichen Zweck verwendet werden.
3.5.6.4 Das auf den Validierungsdatensatz angewendete direkte Zählverfahren soll den "wahren Wert" ergeben. Das auf einen minimal erforderlichen Bruchteil des Validierungsdatensatzes angewendete Extrapolationsverfahren soll den "wahren Wert" mit 95%iger Sicherheit wiedergeben.
3.5.6.5 Die Validierung des Extrapolationsverfahrens ist für 50 statistisch nicht voneinander abhängige Datensätze durchzuführen und für eine Reihe von Schiffsgeschwindigkeiten, relativen Wellenrichtungen und Seegängen auszuwerten.
3.5.6.6 Für jeden Datensatz ist ein Vergleich zwischen der Extrapolation und dem "wahren Wert" vorzunehmen. Der Vergleich ist als erfolgreich anzusehen, wenn sich das Konfidenzintervall der Extrapolation und das Konfidenzintervall des "wahren Wertes" überschneiden.
3.5.6.7 Die Validierung ist als erfolgreich anzusehen, wenn mindestens 88 % der einzelnen Datensatzvergleiche erfolgreich sind.
4 Richtlinien für betriebliche Maßnahmen
4.1 Allgemeine Grundsätze
4.1.1 Eine kombinierte Betrachtung von Entwurfs- und Betriebsaspekten kann effektiv genutzt werden, um ein ausreichendes Sicherheitsniveau zu erreichen. Die Anwendung dieses Grundsatzes erfordert bereitzustellende Anleitungen für die Ausarbeitung betrieblicher Maßnahmen, die mit den Anforderungen an die Entwurfsbewertung übereinstimmen.
4.1.2 Während die in diesen Richtlinien angewendeten Grundsätze für eine Betrachtung aller betrieblichen Probleme im Zusammenhang mit dem Schiffsverhalten im Seegang angewendet werden können, decken die detaillierten Verfahren in diesen Richtlinien die folgenden Versagensmodi der Stabilität ab:
- Totalausfall des Schiffes;
- Übermäßige Beschleunigung;
- Totaler Stabilitätsverlust;
- Parametrisches Rollen; und
- Wellenreiten/Querschlagen.
4.1.3 Diese Richtlinien berücksichtigen die in Absatz 4.3.1 definierten Betriebsbeschränkungen und betrieblichen Anleitungen. Für die folgenden vier Versagensmodi der Stabilität können entweder Betriebsbeschränkungen oder betriebliche Anleitungen verwendet werden: Übermäßige Beschleunigung, Totaler Verlust der Stabilität, Parametrisches Rollen und Wellenreiten/Querschlagen. Für den Versagensmodus "Totalausfall des Schiffes" können nur Betriebsbeschränkungen in Bezug auf Einsatzgebiete oder Fahrtrouten und die Jahreszeit (Absatz 4.3.1.1 und Abschnitt 4.5.1) angewendet werden. Dies bedeutet, dass weder Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe noch betriebliche Anleitungen anwendbar sind, da die Hauptantriebsanlage und die Hilfsanlagen des Schiffes nicht funktionsfähig sind. Dies bedeutet, dass das Schiff weder in der Lage ist, schwerem Wetter auszuweichen noch Geschwindigkeit und Steuerkurs zu beeinflussen.
4.1.4 Betriebsbeschränkungen und betriebliche Anleitungen sollen mindestens das gleiche Sicherheitsniveau bieten wie diejenigen Verfahren und Standards, die in den Richtlinien über Anfälligkeitskriterien in Kapitel 2 oder in den Richtlinien für die direkte Bewertung des Stabilitätsversagens in Kapitel 3 festgelegt sind. Insbesondere soll das Sicherheitsniveau derjenigen Ladefälle, welche die Anforderungen der Entwurfsbewertung in Kapitel 2 oder Kapitel 3 nicht erfüllen, ausreichend sein, wenn alle Kombinationen von Fahrtzustand und Seegang, die nicht durch diese betrieblichen Maßnahmen empfohlen werden, aus der Entwurfsbewertung entfernt werden.
4.1.5 Während das in Absatz 4.1.4 beschriebene Prinzip direkt zur Vorbereitung betrieblicher Maßnahmen zur Gewährleistung eines erforderlichen Sicherheitsniveaus verwendet werden kann, wurden jedoch detailliertere Verfahren entwickelt, die in diesen Richtlinien zur Erleichterung für Schiffskonstrukteure und Verwaltungen beschrieben werden. Die Anwendung der hier beschriebenen Verfahren und Normen entspricht der Festlegung eines Sicherheitsniveaus in Übereinstimmung mit den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3.
4.1.6 Obwohl die Anwendung betrieblicher Maßnahmen die Wahrscheinlichkeit eines Stabilitätsversagens auf ein gewünschtes niedriges Niveau herabsetzen kann, ist ein Ladefall, bei dem zu viele Situationen vermieden werden sollen, um das erforderliche Sicherheitsniveau zu erreichen, nicht als annehmbar anzusehen. Aus praktischer und regulatorischer Sicht sind deshalb betriebliche Maßnahmen nicht als in jedem Fall ausreichend für jeden Ladefall anzusehen.
4.1.7 Falls auf der Grundlage dieser Richtlinien betriebliche Maßnahmen für einen bestimmten Versagensmodus bzw. bestimmte Versagensmodi vorgesehen sind, können diese anstelle der entsprechenden Anforderungen in den im MSC.1/Circ.1228 angegebenen Leitlinien angewendet werden.
4.2 Versagen der Stabilität
4.2.1 Die Definition des Stabilitätsversagens soll mit derjenigen übereinstimmen, die entweder in den Richtlinien über Anfälligkeitskriterien in Kapitel 2 oder in den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 verwendet wird.
4.2.2 Die nachstehenden Vorschriften gelten für alle Schiffe, mit Ausnahme von Schiffen mit einem ausgedehnten niedrigliegenden Wetterdeck, wenn der Versagensmodus "Totalausfall des Schiffes" oder der Versagensmodus "Totaler Stabilitätsverlust" in Betracht gezogen wird.
4.3 Betriebliche Maßnahmen
4.3.1 In diesen Richtlinien werden die folgenden schiffsspezifischen betrieblichen Maßnahmen berücksichtigt:
- Betriebsbeschränkungen, welche die Grenzen für den Betrieb eines Schiffes in einem bestimmten Ladefall festlegen, sind Folgende:
- Betriebsbeschränkungen in Bezug auf Einsatzgebiete oder Fahrtrouten und die Jahreszeit erlauben den Betrieb in bestimmten Einsatzgebieten (entweder in geografischen Bereichen oder in bestimmten Arten von Einsatzgebieten wie geschützten Gewässern) oder Fahrtrouten und gegebenenfalls in der bestimmten Jahreszeit. Für das Einsatzgebiet, die Fahrtroute und die Jahreszeit werden die Umgebungsverhältnisse durch die Tabelle der Wellenstreuung und die entsprechenden Windstatistiken spezifiziert; und
- Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe erlauben den Betrieb unter Verhältnissen bis zu einer maximalen signifikanten Wellenhöhe. Die Umgebungsverhältnisse werden durch die Kombination der Tabelle der Wellenstreuung, in Bezug auf das Einsatz gebiet oder die Fahrtroute und die Jahreszeit, und den entsprechenden Windstatistiken spezifiziert. Die auf eine bestimmte signifikante Wellenhöhe begrenzte Tabelle der Wellenstreuung wird als Tabelle der begrenzten Wellenstreuung bezeichnet; und
- betriebliche Anleitungen, in denen die Kombinationen von Schiffsgeschwindigkeit und Steuerkurs in Bezug auf die mittlere Wellenrichtung, die nicht empfohlen werden und die bei jedem relevanten Seegang zu vermeiden sind, festgelegt sind.
4.3.2 Die in Absatz 4.3.1 angegebenen betrieblichen Maßnahmen erfordern bei ihrer Anwendung einen unterschiedlichen Informations- und Planungsaufwand, und zwar wie folgt:
- Betriebsbeschränkungen in Bezug auf Einsatzgebiete oder Fahrtrouten und die Jahreszeit erfordern keine Wetterdaten während des Betriebs des Schiffes und benötigen somit keine besonderen Informationen und keine besondere Planung;
- Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe erfordern eine Vorhersage der signifikanten Wellenhöhe und die Verfügbarkeit einer geeigneten Fahrtroute rechtzeitig vor dem Auftreten möglichen stürmischen Wetters; und
- die betriebliche Anleitung erfordert detaillierte Vorhersageinformationen über das Wellenenergiespektrum und die Windeigenschaften sowie Mittel zur Angabe von Kombinationen der Geschwindigkeit und des Steuerkurses des Schiffes in Bezug auf die mittlere Wellenrichtung, die zu vermeiden sind; diese Informationen sollen für eine sichere Fahrtroute rechtzeitig vor dem Auftreten möglichen stürmischen Wetters zur Verfügung stehen.
4.3.3 Die in Absatz 4.3.1 angegebenen betrieblichen Maßnahmen können kombiniert werden, z.B. können Betriebsbeschränkungen bis zu einer bestimmten signifikanten Wellenhöhe und eine betriebliche Anleitung für größere signifikante Wellenhöhen angewendet werden. Wenn Betriebsbeschränkungen mit betrieblichen Anleitungen kombiniert werden, gelten die Anforderungen der betrieblichen Anleitung.
4.4 Anerkennung von betrieblichen Maßnahmen
4.4.1 Betriebsbeschränkungen und betriebliche Anleitungen sollen von der Verwaltung entsprechend diesen Richtlinien anerkannt werden.
4.4.2 Die Anerkennung eines Ladefalls für den uneingeschränkten Betrieb, den eingeschränkten Betrieb oder den Betrieb mit bordeigener betrieblicher Anleitung soll nach diesen Richtlinien in Verbindung mit den Anforderungen der Entwurfsbewertung entsprechend Kapitel 2 oder Kapitel 3 erfolgen. Ein Ladefall wird angesehen als:
- zulässig für den uneingeschränkten Betrieb, wenn er die Anforderungen der Entwurfsbewertung für alle fünf in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität erfüllt;
- zulässig für den eingeschränkten Betrieb, wenn er mit Betriebsbeschränkungen für einen oder mehrere der in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität für den uneingeschränkten Betrieb versehen ist, und die Anforderungen der Entwurfsbewertung für die verbleibenden Versagensmodi der Stabilität erfüllt;
- zulässig für den Betrieb unter Verwendung einer bordeigenen betrieblichen Anleitung, wenn er mit einer betrieblichen Anleitung für einen oder mehrere der in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität für den uneingeschränkten Betrieb versehen ist, und entweder mit Betriebsbeschränkungen für den uneingeschränkten Betrieb versehen ist oder die Anforderungen der Entwurfsbewertung für die verbleibenden Versagensmodi der Stabilität erfüllt;
- zulässig für den Betrieb in einem bestimmten Gebiet oder auf einer bestimmten Fahrtroute während einer bestimmten Jahreszeit, wenn er mit Betriebsbeschränkungen für einen oder mehrere der in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität für dieses Gebiet oder diese Fahrtroute und die Jahreszeit versehen ist und die Anforderungen der Entwurfsbewertung für die verbleibenden Versagensmodi der Stabilität erfüllt;
- zulässig für den eingeschränkten Betrieb in einem bestimmten Gebiet oder auf einer bestimmten Fahrtroute während einer bestimmten Jahreszeit, wenn er mit Betriebsbeschränkungen für einen oder mehrere der in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität für einen bestimmten Grenzwert der signifikante Wellenhöhe für dieses Gebiet oder diese Fahrtroute und die Jahreszeit versehen ist und entweder Betriebsbeschränkungen ohne Angabe der maximalen betriebsbedingten signifikanten Wellenhöhe für dieses Gebiet oder diese Fahrtroute und die Jahreszeit aufweist oder die Anforderungen der Entwurfsbewertung für die verbleibenden Versagensmodi der Stabilität erfüllt; und
- zulässig für den Betrieb unter Verwendung einer bordeigenen betrieblichen Anleitung in einem bestimmten Gebiet oder auf einer bestimmten Fahrtroute während einer bestimmten Jahreszeit, wenn er mit einer betrieblichen Anleitung für einen oder mehrere der in Absatz 4.1.2 angegebenen Versagensmodi der Stabilität für dieses Gebiet oder diese Fahrtroute und die Jahreszeit versehen ist und entweder mit Betriebsbeschränkungen für dieses Gebiet oder diese Fahrtroute und die Jahreszeit versehen ist oder die Anforderungen der Entwurfsbewertung für die verbleibenden Versagensmodi der Stabilität erfüllt.
4.4.3 Die Anwendung der Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe oder die betriebliche Anleitung kann die Stabilitätsversagensrate auf ein niedriges Niveau reduzieren. Wenn jedoch für einen bestimmten Ladefall zu viele Fahrtzustände in zu vielen Seegängen vermieden werden sollen, kann dieser Ladefall im praktischen Betrieb nicht als annehmbar angesehen werden. Daraus folgt:
- ein Ladefall kann nicht als annehmbar angesehen werden, wenn das Verhältnis der Gesamtdauer aller zu vermeidenden Situationen zur Gesamtbetriebszeit größer als 0,2 ist. Bei der Berechnung dieses Verhältnisses gehören zu den zu vermeidenden Situationen auch die Situationen, die wie folgt definiert sind:
- Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe; oder
- betriebliche Anleitungen; und
- bei der Berechnung des Verhältnisses in Absatz 4.4.3.1 werden die Wahrscheinlichkeiten der Seegänge entsprechend der Tabelle der vollständigen Wellenstreuung angenommen. Die Wellenrichtungen werden als gleichmäßig verteilt angenommen, und die Schiffsvorausgeschwindigkeit wird als gleichmäßig verteilt zwischen Null und der maximalen Dienstgeschwindigkeit angenommen.
4.4.4 Wirksame Mittel zur Bewegungsreduzierung, wie beispielsweise aktive Flossenstabilisatoren und Tankstabilisatoren, können Rollbewegungen im Seegang erheblich reduzieren. Wenn jedoch solche Einrichtungen bei der Entwicklung und Anwendung der betrieblichen Maßnahmen nicht berücksichtigt werden, kann die Empfehlung für den Kapitän unzulänglich oder irreführend sein. Andererseits soll die Sicherheit des Schiffes unter besonderer Berücksichtigung der in diesen Richtlinien behandelten Aspekte auch im Falle eines Versagens solcher Einrichtungen gewährleistet sein. Deshalb wird empfohlen, dass die Entwicklung, Anwendung und Anerkennung der betrieblichen Maßnahmen sowohl bei in Betrieb befindlichen als auch bei inaktiven (oder eingeklappten, sofern einklappbar) Stabilisatoren erfolgt.
4.4.5 Die betriebliche Anleitung kann einige Fahrtzustände als sicher in Bezug auf die Rollbewegung angeben, die jedoch aufgrund der Begrenzungen der Antriebs- und Steuerungssysteme des Schiffes unerreichbar oder aufgrund anderer Probleme, wie z.B. übermäßige vertikale Bewegungen oder Beschleunigungen und Slamming, unerwünscht sein können. Bei parametrischem Rollen in Bugwellen beispielsweise können die Rollbewegungen mit zunehmender Vorausgeschwindigkeit abnehmen, aber hohe Geschwindigkeiten in Bugwellen können entweder unerreichbar sein oder zu übermäßigen vertikalen Bewegungen oder Belastungen führen. Die Vernachlässigung dieses Widerspruchs kann zu einer irreführenden betrieblichen Anleitung führen oder sogar das Schiff in Gefahr bringen, wenn in einem bestimmten Seegang alle Fahrtzustände, die aus Sicht der Rollbewegungen annehmbar sind, aus anderen Gründen unerreichbar oder gefährlich sind.
4.5 Vorbereitungsverfahren
4.5.1 Betriebsbeschränkungen in Bezug auf Gebiete oder Fahrtrouten und Jahreszeit
4.5.1.1 Betriebsbeschränkungen werden nach den Verfahren zur Entwurfsbewertung in Kapitel 2 oder Kapitel 3 erstellt, wobei modifizierte Umgebungsverhältnisse im Betrieb angenommen werden. Die Änderung der Referenz-Umgebungsverhältnisse basiert auf der Tabelle der Wellenstreuung für ein bestimmtes Gebiet oder eine bestimmte Fahrtroute während einer bestimmten Jahreszeit und entsprechenden Windstatistiken, die für die Verwaltung annehmbar sind.
4.5.1.2 Die Umgebungsverhältnisse, die bei der Ausarbeitung der Betriebsbeschränkungen für bestimmte Gebiete oder bestimmte Fahrtrouten während einer bestimmten Jahreszeit zugrunde gelegt werden, sollen mit den entsprechenden Anfälligkeitskriterien übereinstimmen, wenn die Ausarbeitung auf den Richtlinien über Anfälligkeitsbewertung in Kapitel 2 beruht. Wenn die Ausarbeitung auf einer direkten Stabilitätsbewertung beruht, sollen diese Umgebungsverhältnisse mit den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 übereinstimmen. Gegebenenfalls können auch andere Umgebungsverhältnisse angewendet werden.
4.5.1.3 Für einige Verfahren zur Bewertung der Anfälligkeit der Stufe 1 und Stufe 2 sind auf der Grundlage der Wellenstatistik Fälle mit regelmäßigen Wellen zu definieren.
4.5.2 Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe
4.5.2.1 Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe werden unter Verwendung der Entwurfsbewertungsverfahren in Kapitel 2 oder Kapitel 3 für eine bestimmte Umgebung entwickelt, die durch Auswahl eines Ausschnitts der Tabelle der Wellenstreuung für ein bestimmtes Gebiet oder eine bestimmte Fahrtroute während einer bestimmten Jahreszeit bei einer bestimmten signifikanten Wellenhöhe und durch entsprechende Änderung der Windstatistiken definiert wird.
4.5.2.2 Die Umgebungsverhältnisse, die bei der Ausarbeitung der Betriebsbeschränkungen für die maximale signifikante Wellenhöhe zugrunde gelegt werden, sollen mit den entsprechenden Anfälligkeitskriterien übereinstimmen, wenn die Ausarbeitung auf den Richtlinien über Anfälligkeitsbewertung in Kapitel 2 beruht. Wenn die Ausarbeitung auf einer direkten Stabilitätsbewertung beruht, sollen diese Verhältnisse mit den Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 übereinstimmen. Gegebenenfalls können auch andere Umgebungsverhältnisse angewendet werden.
4.5.2.3 Für bestimmte Verfahren zur Bewertung der Anfälligkeit der Stufe 1 und Stufe 2 ist eine Definition der entsprechenden Fälle mit regelmäßigen Wellen erforderlich; dies geschieht auf die gleiche Weise wie bei den Betriebsbeschränkungen ohne Angabe der maximalen signifikanten Wellenhöhe für den Betrieb.
4.5.3 Allgemeine Grundsätze für die Ausarbeitung von betrieblichen Anleitungen
4.5.3.1 In den betrieblichen Anleitungen sind alle Fahrtzustände anzugeben, die für jeden Bereich des Seegangs in der entsprechenden Tabelle der Wellenstreuung zu vermeiden sind.
4.5.3.2 Betriebliche Anleitungen sollen sicherstellen, dass der betrachtete Ladefall die Anforderungen der Entwurfsbewertung in Kapitel 2 oder Kapitel 3 erfüllt, nachdem alle zu vermeidenden Fahrtzustände aus der Entwurfsbewertung entfernt wurden. Um die Erstellung und Annahme von betrieblichen Anleitungen zu vereinfachen, werden nachstehend drei gleichwertige Ansätze, die für die Erstellung von betrieblichen Anleitungen empfohlen werden, im Detail betrachtet. Diese Ansätze beruhen auf:
- probabilistischen Bewegungskriterien und Standards (bezeichnet als probabilistische betriebliche Anleitungen);
- deterministischen Bewegungskriterien und Standards (bezeichnet als deterministische betriebliche Anleitungen); und
- vereinfachten Bewegungskriterien und Standards (bezeichnet als vereinfachte betriebliche Anleitungen).
4.5.3.3 In den betrieblichen Anleitungen sind die annehmbaren und unannehmbaren Fahrtzustände für jeden relevanten Seegang eindeutig anzugeben und können in Form eines Polardiagramms dargestellt werden.
4.5.3.4 Andere Darstellungsformen für die betrieblichen Anleitungen als Polardiagramme können verwendet werden, vorausgesetzt, dass gleichwertige Angaben enthalten sind.
4.5.4 Probabilistische betriebliche Anleitungen
4.5.4.1 Diese Art der betrieblichen Anleitungen verwendet probabilistische Kriterien, wie beispielsweise die Wahrscheinlichkeit eines Stabilitätsversagens während eines bestimmten Zeitraums oder die Rate des Stabilitätsversagens, und entsprechende probabilistische Schwellenwerte, um die Fahrtzustände zu kennzeichnen, die zu vermeiden sind.
4.5.4.2 Zu vermeidende Fahrtzustände sind solche, bei denen:
r > 10-6 s-1;
wobei r (s-1) die obere Grenze des 95 %-Konfidenzintervalls der Rate des Stabilitätsversagens ist.
4.5.4.3 Die Verfahren und numerischen Methoden, die für die Bestimmung der Versagensrate entsprechend Absatz 4.5.4.2 angewendet werden, sollen die Empfehlungen der Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 erfüllen.
4.5.4.4 Wenn eine bestimmte angenommene Situation vermieden werden soll, ist eine Bewertung für höhere signifikante Wellenhöhen bei unveränderten anderen Parametern nicht erforderlich. Umgekehrt, wenn eine bestimmte angenommene Situation nicht vermieden werden soll, ist eine Bewertung für niedrigere signifikante Wellenhöhen bei unveränderten anderen Parametern nicht erforderlich.
4.5.5 Deterministische betriebliche Anleitungen
4.5.5.1 Die Verwendung deterministischer Kriterien, wie beispielsweise die maximale Rollamplitude in einer vorgegebenen Expositionszeit, stellt einen einfacheren, aber weniger genauen Ansatz dar als die Verwendung probabilistischer Kriterien. Um ein gleichwertiges Sicherheitsniveau zu gewährleisten, werden deshalb die Schwellenwerte für deterministische Kriterien konservativ ausgewählt.
4.5.5.2 Deterministische betriebliche Anleitungen können nur mit Modellversuchen, nur mit numerischen Simulationen oder einer Kombination davon erstellt werden. Die bei solchen Simulationen angewendeten numerischen Methoden sollen die Empfehlungen der Richtlinien für die direkte Stabilitätsbewertung in Kapitel 3 erfüllen.
4.5.5.3 Zu vermeidende Fahrtzustände sind solche, bei denen:
α ⋅ x3h > xlim,
wobei α = 2 der Maßstabsfaktor, x3h die mittlere dreistündige maximale Roll- oder Querbeschleunigungsamplitude und xlim der entsprechende Schwellenwert des Stabilitätsversagens ist, wie in den Richtlinien für die direkte Stabilitätsbewertung in Abschnitt 3.2.1 definiert.
4.5.5.4 Für die Bestimmung der mittleren maximalen 3-Stunden-Amplitude beträgt die empfohlene Gesamtdauer einer Prüfung oder Simulation 15 Stunden in Großausführung für jede betrachtete Situation.
4.5.5.5 Wenn eine bestimmte angenommene Situation vermieden werden soll, ist eine Bewertung für höhere signifikante Wellenhöhen bei unveränderten anderen Parametern nicht erforderlich. Umgekehrt, wenn eine bestimmte angenommene Situation nicht vermieden werden soll, ist eine Bewertung für niedrigere signifikante Wellenhöhen bei unveränderten anderen Parametern nicht erforderlich.
4.5.6 Vereinfachte betriebliche Anleitungen
4.5.6.1 Obwohl probabilistische und deterministische betriebliche Anleitungen genaue und detaillierte Empfehlungen für die Vorausgeschwindigkeit und den Steuerkurs des Schiffes in jedem Seegang liefern, sind dafür auch Modellversuche oder numerischen Methoden von hoher Genauigkeit erforderlich. Deshalb können einfachere konservative Vorgehensweisen zur Entwicklung von betrieblichen Anleitungen für die zulässige Vorausgeschwindigkeit und den Steuerkurs verwendet werden, wenn dies für praktikabel erachtet wird.
4.5.6.2 Grundsätzlich können alle einfachen konservativen Abschätzungen für die Fahrtzustände, die in jedem relevanten Seegang zu vermeiden sind, verwendet werden, wenn sie im Vergleich zu den Anforderungen der Entwurfsbewertung nachweislich ein höheres Sicherheitsniveau bieten. Insbesondere können die Anfälligkeitskriterien der Stufen 1 und 2 der Richtlinien über die Anfälligkeitsbewertung in Kapitel 2 verwendet werden. Einige Beispiele für empfohlene Ansätze auf der Grundlage von Anfälligkeitskriterien der Stufen 1 und 2 sind im Folgenden aufgeführt:
- Beim Stabilitäts-Versagensmodus "Übermäßige Beschleunigung" sind alle Vorausgeschwindigkeiten in allen Seegängen zu vermeiden, in denen CS,i > 10-6 ist, wobei CS,i entsprechend Absatz 2.3.3.2.1 der Richtlinien für die Bewertung der Anfälligkeit definiert ist. Die in Absatz 2.3.3.2.2 definierte Übertragungsfunktion ay(ω) wird mit dem absoluten Wert des Sinus des Wellenrichtungswinkels µ multipliziert und durch Ersetzen der Wellenfrequenz ωj durch die Wellenbegegnungsfrequenz ωej berechnet.
- Beim Versagensmodus "Totaler Stabilitätsverlust" ist eine nominale Vorausgeschwindigkeit des Schiffes von 0,752 - L1/2 m/s oder höher bei achterlichen und seitlichen Wellenrichtungen in den Seegängen, für die max( C1i, C2i) = 1 ist, zu vermeiden, wobei C1; und C2; in den Abschnitten 2.4.3.3 bzw. 2.4.3.4 der Richtlinien für die Bewertung der Anfälligkeit definiert sind.
- Beim Stabilitäts-Versagensmodus "Parametrisches Rollen" ist die Vorausgeschwindigkeit, für die CS,i( vs, Hs, Tz), definiert nach Absatz 2.5.3.3.1 der Richtlinien für die Bewertung der Anfälligkeit, gleich 1 ist, in allen Wellenrichtungen und bei allen Seegängen zu vermeiden.
- Beim Versagensmodus "Wellenreiten/Querschlagen" ist entweder:
- eine nominale Schiffsgeschwindigkeit von 0,94 - L1/2 (m/s) oder höher zu vermeiden, wenn die Wellenlänge, bezogen auf die mittlere Wellenperiode, mehr als 80 % der Schiffslänge beträgt, die signifikante Wellenhöhe mehr als 4 % der Schiffslänge L (m) beträgt und der Kurswinkel µ (deg) zur Wellenrichtung weniger als 45 Grad beträgt; oder
- alternativ die kritische nominale Schiffsgeschwindigkeit, die sich aus den Kriterien für die Anfälligkeit der Stufe 2 (siehe Absatz 2.6.3.4.2) oder höher ergibt, bei achterlichen und seitlichen Wellenrichtungen in Seegängen, für die cHT > 0,005 ist, zu vermeiden, wobei cHT wie folgt berechnet wird:
wobei wij ( Hs, Tz) und C2ij auf der Grundlage der Kriterien für die Anfälligkeit der Stufe 2 in Absatz 2.6.3.2 zu berechnen sind, wobei jedoch die Beugungskomponente der Wellenkraft berücksichtigt wird.
4.6 Anwendung
4.6.1 Betriebliche Anleitungen sind in Form von leicht zugänglichen und verständlichen Informationen in grafischer Form bereitzustellen, welche die unannehmbaren Fahrtzustände für einen bestimmten Seegang sowie die relevanten Versagensmodi der Stabilität eindeutig angeben. Automatische Alarmsysteme können für die Fälle eingesetzt werden, in denen die Fahrtzustände nahe oder innerhalb der Bereiche unannehmbarer Fahrtzuständen liegen.
4.6.2 Unannehmbare Fahrtzustände werden aus den vorher festgelegten Datenbanken mit probabilistischen, deterministischen oder vereinfachten Sicherheitskriterien abgeleitet, die als Funktionen der Schiffsvorausgeschwindigkeit und des Steuerkurses des Schiffes in Bezug auf die mittlere Wellenrichtung für relevante Seegänge gespeichert sind. Diese Seegänge werden spezifiziert, indem die tatsächliche signifikante Wellenhöhe, die mittlere Nulldurchgangs-Wellenperiode, die mittlere Wellenrichtung und der Steuerkurs des Schiffes als Eingabedaten verwendet werden.
4.6.3 Die Auswirkung nichtparalleler Wellensysteme (Kreuzsee - Cross Sea) kann unter Verwendung dieser vorher festgelegten Datenbanken reproduziert werden, indem getrennte Reaktionen auf Windsee und Dünung kombiniert werden, die mit der signifikanten Wellenhöhe, der mittleren Nulldurchgangs-Wellenperiode und der mittleren Wellenrichtung jedes dieser Wellensysteme übereinstimmen, durch:
- Summierung der Rate des Stabilitätsversagens für jedes dieser Wellensysteme bei Anwendung einer probabilistischen betrieblichen Anleitung;
- Summierung der maximalen Reaktionen auf jedes dieser Wellensysteme bei Anwendung einer deterministischen betrieblichen Anleitung; und
- Überlagerung der unannehmbaren Fahrtzustände für jedes dieser Wellensysteme bei Anwendung einer vereinfachten betrieblichen Anleitung.
Das vorstehend beschriebene Verfahren ist als ein praktisches Näherungsinstrument für die Behandlung von Kreuzseeverhältnissen anzusehen, das von Vorberechnungen ausgeht, die auf einfacheren Standard-Seegängen basieren. Ein solches Verfahren ist jedoch nur ein Näherungsverfahren, und die im Schiffsbetrieb anzutreffenden Seegänge können durch komplexe Spektren gekennzeichnet sein, die mehrere Windsee- und Dünungssysteme kombinieren. Deshalb wird bei Ausübung während des Betriebes bei der Anwendung der nach dem beschriebenen Verfahren entwickelten betrieblichen Anleitung besondere Vorsicht empfohlen, wenn der Seegang durch komplexe Kombinationen von Windsee- und Dünungssystemen gekennzeichnet ist.
4.6.4 Der Kapitän hat sicherzustellen, dass das Schiff zu jedem Zeitpunkt während der Reise und unter Berücksichtigung der verfügbaren Wettervorhersagen die Betriebsbeschränkungen in Bezug auf die maximale signifikante Wellenhöhe oder die betriebliche Anleitung einhält.
________
| Bekanntmachung des Rundschreibens des Schiffssicherheitsausschusses MSC der IMO MSC.1/ Rundschreiben 1627, "Vorläufigen Richtlinien über die Kriterien der Intaktstabilität der Zweiten Generation", in deutscher Sprache
Vom 20. Oktober 2022 Az.: 11-3-0 Durch die Dienststelle Schiffssicherheit der BG Verkehr wird hiermit das Rundschreiben des Schiffssicherheitsausschusses MSC der IMO MSC.1/Rundschreiben 1627, "Vorläufigen Richtlinien über die Kriterien der Intaktstabilität der Zweiten Generation", in deutscher Sprache amtlich bekannt gemacht. |
1 Die Kriterien für diesen Versagensmodus sind wegen der erhöhten Wahrscheinlichkeit von Wasser an Deck oder Deck unter Wasser möglicherweise nicht auf ein Schiff mit einem ausgedehnten, niedrigen Wetterdeck anwendbar.
2 Siehe Erläuterungen zum Internationalen Code von 2008 über Intaktstabilität (MSC.1/Rundschreiben 1281).
3 Es wird auf die Interim guidelines for alternative assessment of the weather criterion (MSC.1/Circ.1200) verwiesen.
4 Es wird auf die in den Interim guidelines for alternative assessment of the weather criterion (MSC.1/Circ.1200) beschriebenen Verfahren verwiesen.
5 Es wird auf das in den Interim guidelines for alternative assessment of the weather criterion (MSC.1/Circ.1200) beschriebene Verfahren zur Anleitung verwiesen.
6 Die Kriterien für diesen Versagensmodus sind möglicherweise nicht auf ein Schiff mit einem ausgedehnten, niedrigen Wetterdeck wegen der erhöhten Wahrscheinlichkeit von Wasser an Deck oder Deck unter Wasser anwendbar.
7 Es wird auf die Empfehlung Recommendation No.34 (Corr. Nov.2001) der International Association of Classification Societies (IACS) verwiesen.
8 Der Modellversuch mit einem festgehaltenen Modell soll auf dem vom ITTC empfohlenen Verfahren 7.5-02-06-02, herausgegeben im Jahr 2014, in seiner jeweils geänderten Fassung basieren. Die stationäre Kreisprüfung mittels eines zweidimensional (x-y) beweglichen Wagens kann eine kreisförmige Modellbewegung mit einem vorgegebenen Driftwinkel reproduzieren, indem die Bewegung eines zweidimensional (x-y) beweglichen Wagens und eines Drehtisches kombiniert wird.
 | ENDE | |
...
X
⍂
↑
↓