
 Für einen individuellen Ausdruck passen Sie bitte die Für einen individuellen Ausdruck passen Sie bitte dieEinstellungen in der Druckvorschau Ihres Browsers an. ▢ Regelwerk, Immissionsschutz, Lärm |  |
BUB - Berechnungsmethode für den Umgebungslärm von bodennahen Quellen
(Straßen, Schienenwege, Industrie und Gewerbe)
Vom 20. November 2018
(BAnz AT 28.12.2018 B7)
(Anlage 1 zu BAnz AT 28.12.2018 B7)
1 Allgemeine Bestimmungen
1.1 Definition der Indizes, Frequenzbereiche und Frequenzbänder
Die Berechnung des Schalldruckpegels ist für die acht Oktavbänder mit den Mittenfrequenzen von 63 Hz bis 8 kHz vorzunehmen.
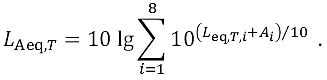
Die Berechnung des Straßenverkehrs-, Schienenverkehrs- sowie Industrie- und Gewerbelärms erfolgt in Oktavbändern, ausgenommen jedoch die Schallleistung der Quelle des Schienenverkehrslärms, bei der die Terzbänder genutzt werden. Für den Straßenverkehrs-, Schienenverkehrs- sowie Industrie- und Gewerbelärm, der auf diesen Oktavbandergebnissen beruht, wird der A-bewertete äquivalente Dauerschallpegel für den Zeitraum Tag, Abend und Nacht gemäß § 2 der Verordnung über die Lärmkartierung (34. BImSchV) durch Summierung über alle Frequenzen berechnet:
|
|
(1.1) |
Dabei gilt:
| Ai | bezeichnet die A-Bewertungskorrektur (siehe Tabelle 5.2), |
| i | Frequenzbandindex und |
| T | Index für den Zeitraum (Tag, Abend oder Nacht). |
Wichtige Lärmparameter und weitere physikalische Parameter sind in Tabelle 1.1 aufgeführt.
Tabelle 1.1: Wichtige Parameter
| Formelzeichen | Einheit | Bedeutung |
|
Lp | in dB (re 2 · 10-5 Pa) | Momentaner Schalldruckpegel |
|
LAeq,LT | in dB (re 2 · 10-5 Pa) | Gesamt-Langzeit-DauerschallpegelLAeq ausgehend von allen Quellen und Spiegelquellen am Punkt R |
|
LW | in dB (re 10-12 W) | In-Situ-Schallleistungspegel einer Punktquelle (Bewegung oder Stand) |
|
LW,i,dir | in dB (re 10-12 W) | Gerichteter In-Situ-Schallleistungspegel für das i-te Frequenzband |
|
Lw" | in dB (re 10-12 W/m) | Längenbezogener Schallleistungspegel einer Quellenlinie |
|
p | in Pa | Effektivwert des momentanen Schalldrucks |
|
po | in Pa | Referenzschalldruck = 2 · 10-5 Pa |
|
WO | in W | Referenzschallleistung = 10-12 W |
1.2 Qualitätsrahmen
1.2.1 Genauigkeit der Eingangswerte
Alle Eingangswerte, die den Emissionspegel einer Quelle beeinflussen, sind mit mindestens der Genauigkeit zu bestimmen, die einer Unsicherheit von ± 2 dB(A) im Emissionspegel der Quelle entspricht (wobei alle anderen Parameter unverändert bleiben).
1.2.2 Verwendung von Standardwerten
Die Eingangswerte für die Berechnung entsprechen der tatsächlichen Nutzung. Generell dürfen keine Standardeingangswerte oder -annahmen zugrunde gelegt werden. Standardeingangswerte und -annahmen werden akzeptiert, wenn die Erfassung realer Daten mit unverhältnismäßig hohen Kosten verbunden ist.
1.2.3 Qualität der für die Berechnungen verwendeten Software
Die für die Berechnung verwendeten Softwareprodukte müssen die normgerechte Abbildung dieser Vorschrift sicherstellen; dies kann erfolgen in Anlehnung an die DIN 45687:2006-05, Akustik - Software-Erzeugnisse zur Berechnung der Schallimmissionen im Freien - Qualitätsanforderungen und Prüfbestimmungen.
1.3 Ziel und Anwendungsbereich
Mit der "Berechnungsmethode für den Umgebungslärm von bodennahen Quellen (Straßen, Schienenwege, Industrie und Gewerbe) (BUB)" können die LärmindizesLDEN (Tag-Abend-Nacht-Lärmindex) undLNight (Nacht-Lärmindex) der Verordnung über die Lärmkartierung (34. BImSchV) für den Straßenverkehr, den Schienenverkehr sowie für Industrie und Gewerbeanlagen berechnet werden, die für die Kartierung von Umgebungslärm nach § 47c des Bundes-Immissionsschutzgesetzes benötigt werden. Die Datengrundlage ist in der "Datenbank für die Berechnungsmethode für den Umgebungslärm von bodennahen Quellen (Straßen, Schienenwege, Industrie und Gewerbe) (BUB-D)" dargestellt.
Die BUB gilt nicht für Schallberechnungen nach der Verkehrslärmschutzverordnung (16. BImSchV) und der Technischen Anleitung zum Schutz gegen Lärm (TA Lärm).
2 Straßenverkehrslärm
2.1 Verwendete Symbole und Beschreibung der Quellen
2.1.1 Verwendete Symbole
Tabelle 2.1: Formelzeichen, Einheiten und Bedeutung
| Formelzeichen | Einheit | Bedeutung |
| αi,m | dB | Spektralkorrektur der Fahrbahnoberfläche |
| βm | dB | Geschwindigkeitskorrektur der Fahrbahnoberfläche |
| ΔLWP,acc,m,k | dB | Korrekturterm zur Berücksichtigung des Einflusses einer lichtzeichengeregelten Kreuzung oder eines Kreisverkehrs auf das Antriebsgeräusch |
| ΔLWP,grad,m | dB | Korrekturterm zur Berücksichtigung des Einflusses der Längsneigung der Straße auf das Antriebgeräusch |
| ΔLWp,i,m | dB | Gesamtkorrekturterm für das Antriebsgeräusch |
| ΔLWP,road,i,m | dB | Korrekturterm zur Berücksichtigung des Einflusses der Straßenoberfläche auf das Antriebsgeräusch |
| ΔLWR,acc,m,k | dB | Korrekturterm zur Berücksichtigung des Einflusses einer lichtzeichengeregelten Kreuzung oder eines Kreisverkehrs auf das Rollgeräusch |
| ΔLWr,i,m | dB | Gesamtkorrekturterm für das Rollgeräusch |
| ΔLWR,road,i,m | dB | Korrekturterm zur Berücksichtigung des Einflusses der Straßenoberfläche auf das Rollgeräusch |
| ΔLWR,temp | dB | Korrekturterm zur Berücksichtigung des Einflusses der Lufttemperatur auf das Rollgeräusch |
| τ | °C | Jahresdurchschnittstemperatur |
| τref | - | Referenztemperatur (τref = 20 °C) |
| AP,i,m | dB | Grundkoeffizient für das Antriebsgeräusch |
| AR,i,m | dB | Grundkoeffizient für das Rollgeräusch |
| BP,i,m | dB | Geschwindigkeitskoeffizient für das Antriebsgeräusch |
| BR,i,m | dB | Geschwindigkeitskoeffizient für das Rollgeräusch |
| CP,m,k | dB | Antriebsgeräuschkoeffizient, abhängig von der Art des Straßenknotenpunkts |
| CR,m,k | dB | Rollgeräuschkoeffizient, abhängig von der Art des Straßenknotenpunkts |
| i | - | Index für das Frequenzband |
| k | - | Index für die Art des Straßenknotenpunkts |
| Km | dB/ °C | Korrekturkoeffizient für die Temperatur |
| LW,i,m | dB | Gesamtschallleistungspegel eines Fahrzeugs |
| LW",i,m | dB | Längenbezogener Schallleistungspegel einer Quellenlinie |
| LWP,i,m | dB | Schallleistungspegel des Antriebsgeräuschs eines Fahrzeugs |
| LWR,i,m | dB | Schallleistungspegel des Rollgeräuschs eines Fahrzeugs |
| m | - | Index für die Fahrzeugklasse |
| Qm | 1/h | Verkehrsfluss von Fahrzeugen der Klasse m |
| s | % | Längsneigung der Straße |
| vm | km/h | Durchschnittsgeschwindigkeit der Fahrzeugklasse m |
| vref | - | Referenzgeschwindigkeitvref = 70 km/h |
| x | m | Entfernung der Punktquelle vom nächst-gelegenen Schnittpunkt der entsprechenden Quellenlinie mit einer anderen Quellenlinie |
2.1.2 Klassifizierung der Fahrzeuge
Die Quelle von Straßenverkehrslärm wird durch Kombination der Schallemission jedes einzelnen Fahrzeugs, das Teil des Verkehrsflusses ist, bestimmt Die Fahrzeuge werden ausgehend von den Merkmalen ihrer Schallemission in vier Klassen, zwingend vorgeschriebene, eingeteilt:
| Klasse 1: | Leichte Kraftfahrzeuge, |
| Klasse 2: | Mittelschwere Fahrzeuge, |
| Klasse 3: | Schwere Fahrzeuge, |
| Klasse 4: | Zweirädrige Kraftfahrzeuge, |
Bei den zweirädrigen Kraftfahrzeugen erfolgt eine weitere Unterteilung in zwei Teilklassen, nämlich Mopeds und leistungsstärkere Krafträder, da sie sehr unterschiedlich gefahren werden und in der Regel zahlenmäßig weit auseinanderliegen.
Genaue Angaben zu den verschiedenen Fahrzeugklassen finden sich in Tabelle 2.2.
Tabelle 2.2: Fahrzeugklassen
| Klasse | Bezeichnung | Beschreibung | Fahrzeugklasse in EG-Typgenehmigung für vollständige Fahrzeuge 1 |
|
1 | Leichte Kraftfahrzeuge | PKW, Lieferwagen ≤ 3,5 t, Geländewagen (SUV 2), Großraumlimousinen 3, einschließlich Anhänger und Wohnwagen | M1 und N1 |
|
2 | Mittelschwere Fahrzeuge | Mittelschwere Fahrzeuge, Lieferwagen > 3,5 t, Busse, Wohnmobile usw. mit zwei Achsen und Doppelbereifung auf der Hinterachse | M2, M3 und N2, N3 |
|
3 | Schwere Fahrzeuge | Schwere Nutzfahrzeuge, Reisebusse, Busse, mit drei oder mehr Achsen | M2 und N2 mit Anhänger, M3 und N3 |
|
4 | Zweirädrige Kraftfahrzeuge | 4a Zwei-, drei- und vierrädrige Mopeds | L1e, L2e, L6e |
| 4b Motorräder mit und ohne Seitenwagen, drei- und vierrädrige Motorräder | L3e, L4e, L5e, L7e |
2.1.3 Anzahl und Position äquivalenter Schallquellen
Bei diesem Verfahren wird jedes Fahrzeug (Klasse 1, 2, 3 und 4) durch eine einzige Punktquelle dargestellt, die gleichförmig in den 2π-Halbraum über dem Boden abstrahlt. Die erste Reflexion an der Straßenoberfläche wird implizit behandelt. Wie in Abbildung 2.1 dargestellt, befindet sich die Punktquelle 0,05 m über der Straßenoberfläche.
Abbildung 2.1: Position der äquivalenten Punktquelle bei leichten Fahrzeugen (Klasse 1), schweren Fahrzeugen (Klassen 2 und 3) und zweirädrigen Kraftfahrzeugen (Klasse 4)
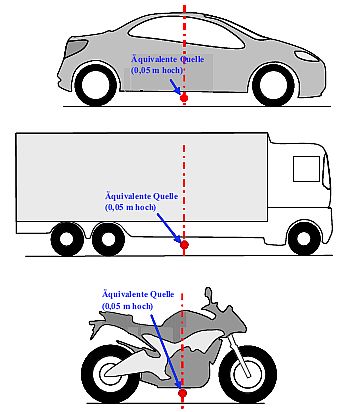
Die Darstellung des Verkehrsflusses erfolgt durch eine Quellenlinie. Bei der Modellierung einer Straße mit mehreren Fahrspuren sollte idealerweise jede Fahrspur durch eine in ihrer Mitte verlaufende Quellenlinie repräsentiert werden. Es ist jedoch auch akzeptabel, bei einer Straße mit zwei Richtungsfahrbahnen eine Quellenlinie in der Straßenmitte oder bei mehrspurigen Straßen eine Quellenlinie je Fahrbahn in der äußeren Fahrspur zu modellieren.
2.1.4 Schallleistungsemission
2.1.4.1 Allgemeine Betrachtungen
Da die Schallleistung der Quelle im "akustischen Halbraum" definiert wird, umfasst die Schallleistung auch den Effekt der Reflexion am Boden direkt unter der modellierten Quelle, wo es, abgesehen von der Reflexion an der Straßenoberfläche, die sich nicht direkt unter der modellierten Quelle befindet, keine störenden Gegenstände im unmittelbaren Umfeld gibt.
2.1.4.2 Verkehrsfluss
Die Schallemission eines Verkehrsflusses wird durch eine Quellenlinie dargestellt, die durch ihre gerichtete Schallleistung je Meter pro Frequenz gekennzeichnet ist. Dies entspricht der Summe der Schallemission der einzelnen Fahrzeuge im Verkehrsfluss unter Berücksichtigung der von den Fahrzeugen im untersuchten Straßenabschnitt verbrachten Zeit. Die Darstellung des einzelnen Fahrzeugs im Fluss erfordert die Anwendung eines Verkehrsflussmodells.
Wird ein stetiger Verkehrsfluss vonQm Fahrzeugen der Klasse m je Stunde mit einer Durchschnittsgeschwindigkeitvm (in km/h) angenommen, so wird die Schallleistung je Meter im Frequenzband i der Quellenlinie,LW",i,m , bestimmt durch:
|
LW",i,m =LW,i,m + 10 lg (Qm / 1.000vm) , |
(2.1) |
wobeiLW,i,m die Schallleistung eines einzelnen Fahrzeugs ist.LW",i,m wird in dB angegeben (re 10-12 W/m). Diese Schallleistungspegel werden für jedes Oktavbandi von 63 Hz bis 8 kHz berechnet.
VerkehrsflussdatenQm sind als Jahresdurchschnitt je Zeitraum (Tag-Abend-Nacht), je Fahrzeugklasse und je Quellenlinie anzugeben. Für alle Klassen sind die Eingabedaten für den Verkehrsfluss zu verwenden, die im Rahmen von Straßenverkehrszählungen oder mithilfe von Verkehrsmodellen ermittelt wurden.
Die Geschwindigkeitvm ist eine repräsentative Geschwindigkeit je Fahrzeugklasse: in den meisten Fällen die gesetzliche Höchstgeschwindigkeit für den Straßenabschnitt oder die gesetzliche Höchstgeschwindigkeit für die Fahrzeugklasse, je nachdem, welcher Wert niedriger ist. Stehen vor Ort erfasste Messdaten nicht zur Verfügung, wird die gesetzliche Höchstgeschwindigkeit für die Fahrzeugklasse verwendet.
2.1.4.3 Einzelnes Fahrzeug
Im Verkehrsfluss wird für alle Fahrzeuge der Klasse m angenommen, dass sie mit der gleichen Geschwindigkeit fahren, alsovm, der Durchschnittsgeschwindigkeit des Verkehrsflusses der Klasse.
Ein Straßenfahrzeug wird mittels einer Reihe mathematischer Gleichungen modelliert, die die beiden Hauptgeräuschquellen repräsentieren:
- Rollgeräusche aufgrund der Wechselwirkung Reifen/Straße;
- Antriebsgeräusche, die vom Antriebssystem (Motor, Auspuff usw.) des Fahrzeugs erzeugt werden.
Aerodynamische Geräusche sind in der Quelle für Rollgeräusche inbegriffen.
Für leichte, mittelschwere und schwere Kraftfahrzeuge (Klassen 1, 2 und 3) entspricht die Gesamtschallleistung der energetischen Summe der Roll- und der Antriebsgeräusche. Somit wird der Gesamtschallleistungspegel eines Fahrzeugs fürm = 1, 2 oder 3 definiert durch:
|
LW,i,m (vm)= 10 lg(10LWR,i,m (vm)/10 + 10LWP,i,m(vm)/10) , |
(2.2) |
wobeiLWR,i,m der Schallleistungspegel für Rollgeräusche undLWP,i,m der Schallleistungspegel für Antriebsgeräusche ist. Dies gilt für alle Geschwindigkeitsbereiche. Bei Geschwindigkeiten unter 20 km/h entspricht der Schallleistungspegel dem Wert, wie er durch die Formel fürvm = 20 km/h bestimmt ist.
Für zweirädrige Kraftfahrzeuge (Klasse 4) werden für die Quelle nur die Antriebsgeräusche berücksichtigt:
|
LW,i,m=4 (vm=4) =LWP,i,m=4 (vm=4) . |
(2.3) |
Dies gilt für alle Geschwindigkeitsbereiche. Bei Geschwindigkeiten unter 20 km/h entspricht der Schallleistungspegel dem Wert, wie er durch die Formel fürvm = 20 km/h bestimmt ist.
2.2 Referenzbedingungen
Die Quellengleichungen und -koeffizienten gelten für folgende Referenzbedingungen:
- konstante Fahrzeuggeschwindigkeit,
- ebene Straße,
- Lufttemperatur von τref = 20 °C,
- virtuelle Referenzstraßenoberfläche, bestehend aus einem einen durchschnittlichen Verdichtungsgrad aufweisenden Asphaltbeton 0/11 und Splittmastixasphalt 0/11, zwei bis sieben Jahre alt und in einem repräsentativen Instandhaltungszustand und
- eine trockene Straßenoberfläche.
2.3 Rollgeräusche
2.3.1 Allgemeine Gleichung
Der Schallleistungspegel der Rollgeräusche im Frequenzbandi für ein Fahrzeug der Klassem = 1, 2 oder 3 wird definiert als:
|
LWR,i,m = AR,i,m + BR,i,m · lg (vm / vref) +ΔLWR,i,m . |
(2.4) |
Die KoeffizientenAR,i,m undBR,i,m sind für jede Fahrzeugklasse und für eine Referenzgeschwindigkeit vonvref = 70 km/h in Oktavbändern gegeben.ΔLWR,i,m entspricht der Summe der Korrekturkoeffizienten, die auf die Rollgeräuschemissionen bei bestimmten Straßen- oder Fahrzeugbedingungen angewendet werden, die von den Referenzbedingungen abweichen:
|
ΔLWR,i,m = ΔLWR,road,i,m + ΔLWR,acc,m,k + ΔLW,temp. |
(2.5) |
Dabei gilt:
| ΔLWR,road,i,m | dient der Berücksichtigung des Einflusses, den eine Straßenoberfläche mit akustischen Eigenschaften, die von denen der virtuellen Referenzoberfläche nach Abschnitt 2.2 abweichen, auf die Rollgeräusche ausübt. Der Wert schließt den Einfluss sowohl auf die Ausbreitung als auch auf die Entstehung ein. |
| ΔLWR,acc,m,k | dient der Berücksichtigung des Einflusses, den eine lichtzeichengeregelte Kreuzung oder ein Kreisverkehr auf die Rollgeräusche ausübt. Der Wert schließt den Einfluss der Geschwindigkeitsveränderung auf die Geräuscherzeugung ein. |
| ΔLWR,temp | ist ein Term zur Korrektur einer Durchschnittstemperatur τ, die von der Referenztemperatur τref = 20 °C abweicht. |
2.3.2 Einfluss der Lufttemperatur auf die Rollgeräuschkorrektur
Die Lufttemperatur beeinflusst die Rollgeräuschemissionen in der Form, dass der Schallleistungspegel der Rollgeräusche mit steigender Lufttemperatur absinkt. Der Einfluss der Lufttemperatur wird in die Korrektur der Rollgeräusche auf der Straßenoberfläche einbezogen. Die Korrektur der Rollgeräusche auf der Straßenoberfläche wird normalerweise bei einer Lufttemperatur von τref = 20 °C bewertet. Im Falle einer anderen Jahresdurchschnittslufttemperatur τ (in °C) wird der durch die Straßenoberfläche verursachte Schall korrigiert durch:
|
ΔLWR,temp =Km (τref - τ) . |
(2.6) |
Der Korrekturterm ist bei Temperaturen unter 20 °C positiv (d. h. der Schallpegel steigt) und bei höheren Temperaturen negativ (d. h. der Schallpegel sinkt). Der KoeffizientK ist abhängig von der Straßenoberfläche und den Reifenmerkmalen und weist im Allgemeinen eine gewisse Frequenzabhängigkeit auf. Bei allen Straßenoberflächen ist ein generischer Koeffizient für leichte Fahrzeuge (Klasse 1) vonKm=1 = 0,08 dB/ °C und für schwere Fahrzeuge (Klassen 2 und 3) vonKm=2 =Km=3 = 0,04 dB/ °C anzuwenden. Der Korrekturkoeffizient ist auf alle Oktavbänder von 63 Hz bis 8 kHz gleichmäßig anzuwenden.
2.4 Antriebsgeräusche
2.4.1 Allgemeine Gleichung
Die Emission der Antriebsgeräusche umfasst die Gesamtheit der Anteile, die auf Motor, Auspuff, Getriebe, Lufteinlass usw. entfallen. Der Schallleistungspegel für die Antriebsgeräusche im Frequenzbandi für ein Fahrzeug der Klasse m wird definiert als:
|
LWP,i,m = AP,i,m + BP,i,m · ((vm - vref) / vref) +ΔLWP,i,m . |
(2.7) |
Die KoeffizientenAP,i,m undBP,i,m werden in Oktavbändern für jede Fahrzeugklasse und für eine Referenzgeschwindigkeitvref = 70 km/h angegeben.
| ΔLWP,i,m | entspricht der Summe der Korrekturkoeffizienten, die auf die Emission von Antriebsgeräuschen bei bestimmten Fahr- oder regionalen Bedingungen anzuwenden sind, die von den Referenzbedingungen abweichen: | |
| ΔLWP,i,m =ΔLWP,road,i,m +ΔLWP,grad,m +ΔLWP,acc,m,k. |
(2.8) | |
| ΔLWP,road,i,m | dient der Berücksichtigung des Einflusses, den die Straßenoberfläche auf die Antriebsgeräusche mittels Absorption ausübt. Die Berechnung wird gemäß Abschnitt 2.6 durchgeführt. | |
ΔLWP,acc,m,k und ΔLWP,grad,mdienen der Berücksichtigung des Einflusses, den Straßensteigungen und das Abbremsen sowie Beschleunigen der Fahrzeuge an Straßenkreuzungen ausüben. Sie werden gemäß Abschnitt 2.4 bzw. 2.5 berechnet.
2.4.2 Einfluss von Straßensteigungen
Die Straßensteigung wirkt sich in zweierlei Hinsicht auf die Schallemission des Fahrzeugs aus:
- zum einen auf die Fahrzeuggeschwindigkeit und damit auf die Emission von Roll- und Antriebsgeräuschen des Fahrzeugs;
- zum anderen auf die Motorleistung und die Motordrehzahl je nach eingelegtem Gang und damit auf die Emission von Antriebsgeräuschen des Fahrzeugs.
In diesem Abschnitt wird nur der Einfluss auf die Antriebsgeräusche betrachtet, wobei eine gleichbleibende Geschwindigkeit angenommen wird.
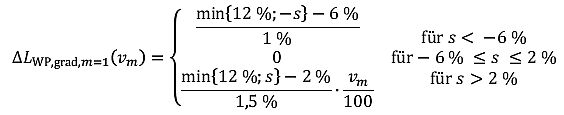
Der Einfluss der Straßensteigung auf die Antriebsgeräusche wird durch den Korrekturterm ΔLWP,grad,m berücksichtigt, der von der Längsneigungs (in %), der Fahrzeuggeschwindigkeitvm (in km/h) und der Fahrzeugklassem abhängig ist. Bei einem Verkehrsfluss mit Gegenverkehr muss der Fluss in zwei Komponenten aufgespalten und zur Hälfte für bergauf sowie zur Hälfte für bergab korrigiert werden. Der Korrekturterm wird allen Oktavbändern gleichmäßig angerechnet:
• Fürm = 1
 |
(2.9) |
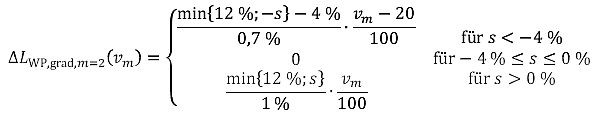
• Fürm = 2
 |
(2.10) |
• Fürm = 3
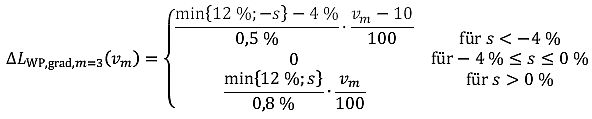 |
(2.11) |
• Fürm = 4
|
ΔLWP,grad,m=4 (vm)= 0 |
(2.12) |
Die Korrektur ΔLWP,grad,m schließt implizit den Einfluss der Längsneigung auf die Geschwindigkeit ein.
2.5 Einfluss des Beschleunigens und Abbremsens von Fahrzeugen
Zur Berücksichtigung des Einflusses des Beschleunigens und Abbremsens vor bzw. nachlichtzeichengeregelten Kreuzungen und Kreisverkehren ist eine Korrektur wie nachfolgend beschrieben vorzunehmen.
Die Korrekturterme für Rollgeräusche, ΔLWR,acc,m,k , und Antriebsgeräusche, ΔLWP,acc,m,k , sind lineare Funktionen der Entfernung x (in m) der Punktquelle vom nächstgelegenen Schnittpunkt der entsprechenden Quellenlinie mit einer anderen Quellenlinie. Sie werden allen Oktavbändern gleichmäßig angerechnet:
|
|
(2.13) |
|
|
(2.14) |


Die KoeffizientenCR,m,k undCP,m,k sind abhängig von der Art des Straßenknotenpunktsk (k = 1 für eine lichtzeichengeregelte Kreuzung;k = 2 für einen Kreisverkehr) und werden für jede einzelne Fahrzeugklasse angegeben. Die Korrektur schließt den Einfluss der Geschwindigkeitsänderung beim Heranfahren an eine Kreuzung oder einen Kreisverkehr bzw. beim Verlassen der Kreuzung oder des Kreisverkehrs ein.
Zu beachten ist, dass bei einer Entfernung von |x| ≥ 100 m Folgendes gilt:
ΔLWR,acc,m,k =ΔLWP,acc,m,k= 0.
2.6 Einfluss der Art der Straßenoberfläche
2.6.1 Allgemeine Grundsätze
Bei Straßenoberflächen mit akustischen Eigenschaften, die von denen der Referenzoberfläche abweichen, ist sowohl für die Rollgeräusche als auch für die Antriebsgeräusche ein Spektralkorrekturterm anzuwenden.
Für die Rollgeräuschemissionen wird der in Bezug auf die Straßenoberfläche anzuwendende Korrekturterm angegeben durch:
|
ΔLWR,road,i,m = αi,m + βm· lg(vm / vref) |
(2.15) |
Dabei gilt:
| αi,m | ist die Spektralkorrektur in dB bei Referenzgeschwindigkeitvref für Klasse m (1, 2 oder 3) und Spektralbandi. |
| βm | ist der Einfluss der Geschwindigkeit auf die Verringerung der Rollgeräusche für Klassem (1, 2 oder 3) und ist für alle Frequenzbänder identisch. |
Für die Antriebsgeräuschemissionen wird der in Bezug auf die Straßenoberfläche anzuwendende Korrekturterm angegeben durch:
|
ΔLWP,road,i,m = min {αi,m; 0}. |
(2.16) |
Die Antriebsgeräusche werden durch absorbierende Oberflächen verringert, durch nicht absorbierende Oberflächen aber nicht verstärkt.
2.6.2 Einfluss der Gebrauchsdauer auf die Geräuscheigenschaften von Straßenoberflächen
Die Geräuschmerkmale von Straßenoberflächen variieren je nach Gebrauchsdauer und Instandhaltungszustand, wobei die Lautstärke im Zeitverlauf tendenziell zunimmt. Bei diesem Verfahren werden die Straßenoberflächenparameter so abgeleitet, dass sie für die akustische Leistung der jeweiligen Straßenoberfläche repräsentativ sind und für eine repräsentative Gebrauchsdauer gemittelt werden, wobei eine ordnungsgemäße Instandhaltung angenommen wird.
3 Schienenverkehrslärm
3.1 Definitionen und verwendete Symbole
Alle in diesem Kapitel verwendeten Abstände, Höhen und Dimensionen werden in Metern (m) angegeben. Die mit dem GroßbuchstabenL bezeichneten Schallleistungspegel werden in Dezibel (dB) je Frequenzband angegeben.
In den Gleichungen dieses Kapitels werden folgende Symbole verwendet:
Tabelle 3.1: Formelzeichen, Einheiten und Bedeutung
| Formelzeichen | Einheit | Bedeutung |
| αA | - | Koeffizient, aerodynamisches Geräusch, Ersatzschallquelle A |
| αB | - | Koeffizient, aerodynamisches Geräusch, Ersatzschallquelle B |
| ΔLW,dir,hor,f | dB | Richtwirkungsmaß horizontal, für das f-te Frequenzband |
| ΔLW,dir,vert,f | dB | Richtwirkungsmaß vertikal, für das f-te Frequenzband |
| ΔLW,dir,vert,A,f | dB | Richtwirkungsmaß vertikal, Ersatzschallquelle A, für das f-te Frequenzband |
| ΔLW,dir,vert,B,f | dB | Richtwirkungsmaß vertikal, Ersatzschallquelle B, für das f-te Frequenzband |
| λ | m | Wellenlänge der Rauheit |
| Φ | rad | horizontaler Winkel bezogen auf die Gleisebene zwischen Fahrtrichtung und Emissionsrichtung |
| ψ | rad | vertikaler Winkel zwischen Gleisebene und Emissionsrichtung |
| A | - | Ersatzschallquelle A (0,5 m üS0) |
| A3,i | dB | Kontaktfilter für das i-te Wellenzahlband |
| B | - | Ersatzschallquelle B (4 m üS0) |
| BüG | - | Besonders überwachtes Gleis |
| Cbr | dB | Konstante für die Geräusche aus der Abstrahlung von Brücken und Viadukten |
| Ccu | dB | Konstante für Geräusche in engen Gleisbögen |
| Ctr,f | dB | Pegelkorrektur, Fahrbahnarten, für das f-te Frequenzband (nur für Straßenbahnfahrzeuge) |
| c | - | Index für den Betriebszustand |
| ƒ | - | Zähler für das Frequenzband |
| ƒc | Hz | Zur Mittenwellenlänge λ bei der Geschwindigkeitv korrespondierende Mittenfrequenz |
| ƒc+ | Hz | Obere benachbarte Frequenz im Frequenzspektrum ƒc für die Mittenfrequenz ƒm |
| ƒc- | Hz | Untere benachbarte Frequenz im Frequenzspektrum ƒc für die Mittenfrequenz ƒm |
| ƒm | Hz | Mittenfrequenz des betrachteten Frequenzbandes |
| h | m | Höhe der Ersatzschallquellen über Schienenoberkante (üSO) |
| i | - | Zähler für das Wellenzahlband |
| j | - | Zähler für den Gleisabschnitt |
| LH,tr,f | dB | Übertragungsfunktion Fahrbahn für den j-ten Gleisabschnitt für das f-te Frequenzband |
| LH,veh,f | dB | Übertragungsfunktion Fahrzeug für die t-te Fahrzeugart, für das f-te Frequenzband |
| LH,sup,f | dB | Übertragungsfunktion für Aufbauten (nur bei Güterwagen), für das f-te Frequenzband |
| Lr | dB | Rauheitsgrad |
| Lr,tot(λ) | dB | Spektrum der effektiven Gesamtrauheit im Wellenlängenbereich |
| Lr,tot(ƒc) | dB | Spektrum der effektiven Gesamtrauheit, transformiert vom Wellenlängenbereich in den Frequenzbereich |
| Lr,tot,i | dB | Grad der effektiven Gesamtrauheit, für das i-te Wellenzahlband |
| Lr,tot,f | dB | Grad der effektiven Gesamtrauheit, für das f-te Frequenzband |
| Lr,tr,i | dB | Schienenrauheitsgrad (schienenseitige Rauheit), für das i-te Wellenzahlband |
| Lr,veh,i | dB | Radrauheitsgrad (fahrzeugseitige Rauheit), für das i-te Wellenzahlband |
| LW,O | dB | Schallleistungspegel, einzelnes Fahrzeug |
| LW,O,f | dB | Schallleistungspegel, einzelnes Fahrzeug, für das f-te Frequenzband |
| LW,O,A,f | dB | Schallleistungspegel, Ersatzschallquelle A eines einzelnen Fahrzeugs, für das f-te Frequenzband |
| LW,O,B,f | dB | Schallleistungspegel, Ersatzschallquelle B eines einzelnen Fahrzeugs, für das f-te Frequenzband |
| LW,O,aer,f | dB | Schallleistungspegel, aerodynamische Geräusche eines einzelnen Fahrzeugs, für das f-te Frequenzband |
| LW,O,aer,A,f | dB | Schallleistungspegel, aerodynamische Geräusche eines einzelnen Fahrzeugs, Ersatzschallquelle A, für das f-te Frequenzband |
| LW,O,aer,B,f | dB | Schallleistungspegel, aerodynamische Geräusche eines einzelnen Fahrzeugs, Ersatzschallquelle B, für das f-te Frequenzband |
| LW,O,const,f | dB | Schallleistungspegel der Antriebs- und Aggregatgeräusche eines einzelnen Fahrzeugs, für gleichbleibende Geschwindigkeit, für das f-te Frequenzband |
| LW,O,dir,f (ψ, Φ) | dB | gerichteter Schallleistungspegel aus jeder spezifischen Geräuschquelle für jede Kombination aus Fahrzeug, Strecke, Geschwindigkeit und Betriebszustand, für das f-te Frequenzband |
| LW,O,id le,f | dB | Schallleistungspegel der Antriebs- und Aggregatgeräusche eines einzelnen Fahrzeugs im Stand, für das f-te Frequenzband |
| LW,O,idle,A,f | dB | Schallleistungspegel der Antriebs- und Aggregatgeräusche eines einzelnen Fahrzeugs im Stand, Ersatzschallquelle A, für das f-te Frequenzband |
| LW,O,idle,B,f | dB | Schallleistungspegel der Antriebs- und Aggregatgeräusche eines einzelnen Fahrzeugs im Stand, Ersatzschallquelle B, für das f-te Frequenzband |
| LW,O,tr,f | dB | Schallleistungspegel, Emission Fahrbahn, für das f-te Frequenzband |
| LW,O,veh,f | dB | Schallleistungspegel, Emission Rad/Drehgestell, für das f-te Frequenzband |
| LW,O,sup,f | dB | Schallleistungspegel, Emission Aufbauten, für das f-te Frequenzband |
| LW,O,rol,A,f | dB | Schallleistungspegel, Rollgeräusche für ein einzelnes Fahrzeug, für das f-te Frequenzband |
| LW,O,rol+br,A,f | dB | Schallleistungspegel, einzelnes Fahrzeug mit Korrektur für Geräusche aus der Abstrahlung von Bauwerken (Brücken und Viadukte), für das f-te Frequenzband |
| LW,ref,A,f | dB | Referenzschallleistungspegel, aerodynamische Geräusche, Ersatzschallquelle A, für das f-te Frequenzband |
| LW,ref,B,f | dB | Referenzschallleistungspegel, aerodynamische Geräusche, Ersatzschallquelle B, für das f-te Frequenzband |
| LW",eq,τref,dir,f | dB | Längenbezogener gerichteter Schallleistungspegel, der sich aus dem durchschnittlichen FahrzeugflussQ ergibt, für das f-te Frequenzband im ReferenzzeitraumTref |
| LW" ,eq,line,dir,f | dB | Längenbezogener gerichteter Schallleistungspegel infolge Fahrzeugfluss Q für das f-te Frequenzband |
| LW",eq,line,dir,x,f | dB | Längenbezogener gerichteter Schallleistungspegel für eine Geräuschquellenlinie für die x-te Kombination aus Fahrzeug, Strecke, Geschwindigkeit und Betriebszustand für das f-te Frequenzband |
| l | m | Länge eines Gleisabschnitts, in dem ein Fahrzeug im Stand verbleibt |
| Na | - | Anzahl der Achsen je Fahrzeug der t-ten Fahrzeugart |
| p | - | Index der technischen Geräuschquellen |
| Q | 1/h | durchschnittliche Anzahl von Fahrzeugen je Stunde(Fahrzeugfluss) |
| R | m | Bogenhalbmesser |
| r | µm | Effektivwert der Rauheit |
| rO | µm | Referenzwert der Rauheit |
| s | - | Zähler für Zuggeschwindigkeit |
| SO | - | Schienenoberkante |
| t | - | Zähler für die Fahrzeugart unter Berücksichtigung der Bremsbauart |
| Tidle | h | Gesamtzeit, die ein Fahrzeug im Stand auf einem Gleisabschnitt verbringt |
| Tref | h | Referenzzeitraum zur Bestimmung der Lärmindizes gemäß § 2 Absatz 1 der Verordnung über die Lärmkartierung (34. BImSchV) |
| üSO | - | über Schienenoberkante |
| v | km/h | maßgebliche Geschwindigkeit |
| vO | km/h | Referenzgeschwindigkeit für aerodynamische Geräusche |
| x | - | Kombination von f, t, s, c und p |
| X | - | Gesamtzahl vorhandener Kombinationen von f, t, s, c und p |
3.2 Beschreibung der Quellen
Mit den Angaben dieses Kapitels kann auch der Lärm von Straßenbahnen und U-Bahnen berechnet werden, unabhängig davon, ob diese auf Eisenbahnstrecken verkehren und dann Eisenbahnlärm erzeugen oder ob diese straßenabhängig verkehren oder sonstige Lärmquellen in Ballungsräumen darstellen.
3.2.1 Klassifizierung der Fahrzeuge
Für die Zwecke dieses Lärmberechnungsverfahrens wird ein Fahrzeug definiert als eine Teileinheit eines Zuges (typischerweise eine Lokomotive, ein Triebwagen, ein Reisezugwagen oder ein Güterwagen), die unabhängig bewegt und vom Rest des Zuges abgehängt werden können. Für Teileinheiten eines Zuges, die Teil einer nicht abtrennbaren Gruppe sind, können spezielle Umstände gelten, z.B. bei einem gemeinsamen Drehgestell. Für die Zwecke dieses Berechnungsverfahrens werden alle diese Teileinheiten zu einem einzigen Fahrzeug zusammengefasst.
Im Sinne dieses Berechnungsverfahrens besteht ein Zug aus einer Reihe von aneinander gekoppelten Fahrzeugen.
Tabelle 3.2 enthält die fahrzeugseitigen Parameter, die für die Berechnung der Geräuschemissionen erforderlich sind. Die Tabelle ist spaltenweise zu lesen. Jeder Fahrzeugart aus Spalte 1 wird dann die jeweilige Anzahl an Achsen (Spalte 2) und die Bremsbauart (Spalte 3) zugeordnet. Sofern Schall mindernde Maßnahmen am Fahrzeug getroffen wurden - Radabsorber oder Schallschürzen -, sind diese zu berücksichtigen. Für alle anderen Fälle gilt die Bezeichnung "n" (keine Maßnahme). Tabelle 3.3 ist analog zu lesen.
Die Anzahl der Fahrzeuge einer jeden Fahrzeugart mit gleichen schalltechnischen Parametern wird für jeden zu kartierenden Gleisabschnitt bestimmt. Sie wird als mittlere Fahrzeugzahl je Stunde ermittelt und auf den jeweiligen Referenzzeitraum (Tag/Abend/Nacht) bezogen (z.B. 24 Fahrzeuge in vier Stunden - Referenzzeitraum Abend - bedeutet sechs Fahrzeuge pro Stunde). Alle Fahrzeugarten, die den jeweiligen Gleisabschnitt passieren, sind einzubeziehen.
Tabelle 3.2: Definitionen für die in Deutschland vorkommenden Schienenfahrzeuge
| Spalte | 1 | 2 | 3 | 4 |
| Definition | Fahrzeugart | Anzahl der Achsen je Fahrzeug | Bremsbauart | Maßnahmen in Bezug auf die Räder |
| Zulässige Codes | h1 HGV-Neigezug (vmax > 200 km/h) | 1 | c Klotzbremse, Grauguss | n keine Maßnahme |
| h2 HGV-Triebzug (vmax > 200 km/h) | 2 | k Klotzbremse, Verbundstoff | d Radabsorber | |
| h3 HGV-Triebkopf (vmax > 200 km/h) | 3 | n Radscheibenbremse oder Wellenscheibenbremse | s Schallschürzen | |
| h4 HGV-Mittel-/Steuerwagen (vmax > 200 km/h) | 4 | |||
| l V-Triebwagen | usw. | |||
| m Elektrotriebwagen | ||||
| p Reisezugwagen | ||||
| n Straßenbahn Niederflurfahrzeug | ||||
| c Straßenbahn Hochflurfahrzeug | ||||
| u U-Bahn-Fahrzeug | ||||
| d V-Lok | ||||
| e Elektrolok | ||||
| a Güterwagen |
3.2.2 Einteilung der Gleistypen und des Schienenoberbaus
Die Lärmemission von Schienenfahrzeugen wird im Allgemeinen von folgenden Faktoren beeinflusst:
- Schienenrauheit
- Steifheit der Zwischenlage
- Oberbau und
- Bogenhalbmesser des Gleisabschnittes.
Ein Gleisabschnitt wird als Teil eines einzelnen Gleises definiert, in dessen Verlauf sich seine schalltechnischen Eigenschaften nicht ändern. Tabelle 3.3 enthält die in Deutschland für die schalltechnische Berechnung maßgeblichen schienenseitigen Eigenschaften und die Parameter des Fahrweges.
Tabelle 3.3: Definitionen für die in Deutschland vorkommenden Fahrbahnarten
| Spalte | 1 | 2 | 3 | 4 | 5 | 6 |
| Definition | Oberbau | Schienenrauheit | Art der Zwischenlage | Zusatzmaßnahmen | Schienenstöße | Krümmung |
| Zulässige Codes | H Holzschwellen im Schotterbett | B Besonders überwachtes Gleis (BüG) | M Mittel (250 bis 800 MN/m) | N Keine | N Keine | KN Niedrig (R ≥ 500 m) |
| B Betonschwellen im Schotterbett | A durchschnittlicher Schienenzustand (Normal instand gehalten und glatt) | D1 Schienenstegdämpfer für Schwellengleis im Schotterbett | KM Mittel (300 m ≤R < 500 m) | |||
| S Feste Fahrbahn | D2 Schienenstegabschirmung für Schwellengleis im Schotterbett | |||||
| CL Bahnübergang | ||||||
| LB Brücke aus Beton/ Mauerwerk Schwellengleis im Schotterbett | T DIN EN ISO 3095:2014-07 4 (Sehr gut instand gehalten und sehr glatt) | D3 Schienenstegdämpfer für Feste Fahrbahn | KH Hoch (R < 300 m) | |||
| LS Stahlbrücke Schwellengleis im Schotterbett | D4 Schienenstegabschirmung für Feste Fahrbahn | |||||
| NB Brücke aus Beton/Mauerwerk Gleise direkt aufgelagert | AS Feste Fahrbahn mit Absorberplatte | |||||
| NS Stahlbrücke Gleise direkt aufgelagert | BM (LB, LS, NB, NS) Hochelastische Schienenbefestigung oder Unterschottermatte auf Brücken | |||||
| T1 Straßenbahn, straßenbündiger Bahnkörper, eingelassene Fahrbahn | ||||||
| T2 Straßenbahn, Rasengleis, niedrige Vegetationsebene | ||||||
| T3 Straßenbahn, Rasengleis, hochliegende Vegetationsebene |
3.2.3 Anzahl und Position der Ersatzschallquellen A und B
Abbildung 3.1: Position der Ersatzschallquellen
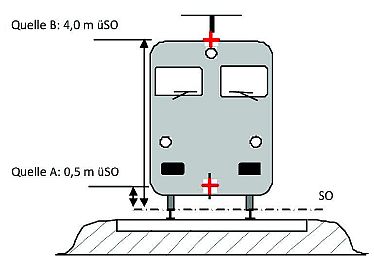
Die verschiedenen Geräuschanteile werden zwei Ersatzschallquellen (Linienschallquellen) in unterschiedlichen Höhen in der Mitte des Gleises zugeordnet. Diese Ersatzschallquellen werden im Folgenden als Quelle A und Quelle B bezeichnet. Alle Höhen beziehen sich auf die Schienenoberkante (SO).
Quelle A: 0,5 m über Schienenoberkante (üSO)
Quelle B: 4,0 m über Schienenoberkante (üSO)
Die Linienschallquellen umfassen verschiedene technische Geräuschquellen (Indexp). Sie werden je nach ihrer Entstehung in verschiedene Kategorien unterteilt:
- Rollgeräusche
(Schwingungen des Oberbaus, Schwingungen der Räder, Geräusche der Aufbauten von Güterfahrzeugen)Die Rauheit der Räder und der Fahrflächen erzeugen über drei Übertragungswege zu den abstrahlenden Oberflächen (Schienen, Räder und Aufbauten) die Rollgeräusche. Die Zuordnung dieser Geräusche erfolgt zu Quelle A, um den Anteil der Fahrbahn (einschließlich der Effekte der Fahrbahnoberfläche), den Anteil der Räder und (bei Güterwagen) den Anteil der Fahrzeugaufbauten an der Geräuscherzeugung abzubilden.
- Antriebsgeräusche
Die Antriebsgeräusche werden den Quellen A und B zugewiesen. Zu den Antriebsgeräuschen zählen:
- Motorgeräusche (einschließlich Einlass, Auspuff und Motorblock), Getriebe, Elektrogeneratoren und elektrische Schallquellen wie zum Beispiel Wandler;
- Geräusche von Gebläsen und Kühlsystemen;
- intermittierende Schallquellen wie Kompressoren, Ventile und andere Aggregate.
- Aerodynamische Geräusche
Die aerodynamischen Geräuscheffekte sind mit den Quellen A und B verbunden und nur für Geschwindigkeiten von mehr als 200 km/h zu berücksichtigen. Sie entstehen vor allem durch Luftströme durch kleine Öffnungen (z.B. Lüftungsgitter, Auspuff), wechselnde Druckbeaufschlagung fester Oberflächen, sowie durch Turbulenzen des Luftstromes am Fahrzeug (z.B. Stromabnehmer). Der Beitrag des Stromabnehmers wird in diesem Modell vereinfachend bei Quelle B mitberücksichtigt.
- Impulshaltige Geräusche von Kreuzungen, Weichen und Schienenstößen
Impulshaltige Geräusche entstehen beim Überfahren von Schienenstößen und Weichen. Diese Geräusche sind durch die Verwendung einer Mindestgeschwindigkeit (Eisenbahnfahrzeuge: 50 km/h, Straßenbahn- und U-Bahn-Fahrzeuge:
30 km/h) berücksichtigt. - Kurvenfahrgeräusche
Das Kurvenfahrgeräusch ist eine besondere Geräuschquelle, die nur in engen Gleisbögen relevant und somit örtlich begrenzt ist. Generell ist das Kurvengeräusch abhängig von der Bogenkrümmung, den Reibungsbedingungen, der Zuggeschwindigkeit sowie der Rad/Schiene-Geometrie und -Dynamik. In der Modellierung nach dieser Vorschrift wird es Quelle A zugeordnet.
- Geräusche aufgrund zusätzlicher Einflussfaktoren wie Brücken und Viadukte
Befindet sich der Gleisabschnitt auf einer Brücke, so müssen die zusätzlichen Geräusche berücksichtigt werden, welche durch die von der Überfahrt des Zuges hervorgerufenen Schwingungen der Brücke erzeugt werden. Diese Geräusche sind der Quelle A zuzuordnen.
3.3 Schallleistungspegel
Der Schallleistungspegel eines jeden Streckenabschnittes wird für jedes Oktavband zwischen 63 Hz und 8 kHz ermittelt. Die Transferfunktionen und deren Koeffizienten, die Koeffizienten der Antriebsgeräusche sowie der aerodynamischen Geräusche liegen in den jeweiligen Terzbändern der Oktaven vor. Die Pegel der längenbezogenen gerichteten Schallleistung, die für die Ausbreitungsrechnung herangezogen werden, sind zunächst für die Terzbänder zu bestimmen. Durch energetische Addition der Terzpegel wird der zugehörige Oktavpegel ermittelt.
3.3.1 Einzelnes Eisenbahnfahrzeug
Das Modell für den Schienenverkehrslärm beschreibt - analog zum Straßenverkehrslärm - die Schallemission einer bestimmten Kombination von Fahrzeugart und Fahrbahnart, die eine Reihe von Voraussetzungen erfüllt, welche in der Fahrzeug- und Fahrbahnklassifizierung in Bezug auf die SchallleistungspegelLW,O für jedes einzelne Fahrzeug im Frequenzbandf beschrieben sind.
Die Schallleistungspegel der Ersatzschallquellen werden wie folgt berechnet:
1) für Quelle A:
| LW,O,A,f = 10 · lg [10 ((LW,O,rol,A,f+ Cbr + Ccu) / 10) + 10 ((LW,o,idle,A,f) / 10) + 10 ((LW,O,αer,A,ƒ) / 10)] |
(3.1) |
2) für Quelle B:
| LW,O,B,f = 10 · lg [10 ((LW,o,idle,A,f) / 10) + 10 ((LW,O,αer,B,f) / 10)] |
(3.2) |
Dabei gilt:
| LW,O,rol,A,f | Schallleistungspegel der Rollgeräusche für ein einzelnes Fahrzeug für dasf-te Frequenzband nach Abschnitt 3.3.5 |
| Cbr | Konstante für Geräusche aus der Schallabstrahlung von Brücken und Viadukten nach Abschnitt 3.4.2 |
| Ccu | Konstante für Geräusche in engen Gleisbögen nach Abschnitt 3.4.3 |
| LW,O,aer,f | Schallleistungspegel für Geräusche aus Aerodynamik eines einzelnen Fahrzeuges für dasf-te Frequenzband nach Abschnitt 3.3.8 für die Quellen A (LW,O,idle,A,f) und B (LW,O,aer,B,f) |
| LW,O,idle,f | Schallleistungspegel des Antriebsgeräuschs eines einzelnen Fahrzeugs nach Abschnitt 3.3.7 für die Quellen A (LW,O,idle,A,f) und B (LW,O,idle,B,f) |
3.3.2 Einzelnes Straßenbahn- oder U-Bahn-Fahrzeug
Abweichend von den Eisenbahnfahrzeugen (Gleichung (3.1)) wird bei Straßenbahn- und U-Bahn-Fahrzeugen folgende Berechnung des Schallleistungspegels für Quelle A verwendet:
|
|
(3.3) |

Dabei istCtr,f ein frequenzabhängiger Zuschlag für die Fahrbahnart.
Aufgrund der üblichen Geschwindigkeiten von Straßenbahn- und U-Bahn-Fahrzeugen sind für diese keine aerodynamischen Geräusche zu berücksichtigen.
3.3.3 Linienschallquelle
Die Schallemission des Schienenverkehrs auf jedem Gleis wird jeweils durch die Quellen A und B (siehe Abschnitt 3.2.3 und Abbildung 3.1) repräsentiert, die durch ihre gerichteten längenbezogenen Schallleistungspegel (siehe Abschnitt 3.3.4) je Frequenzband charakterisiert sind. Sie entspricht der Summe der Schallemissionen aller im Verkehrsfluss vorbeifahrenden Fahrzeuge, wobei im speziellen Fall stehender Fahrzeuge die Zeit berücksichtigt wird, die die Fahrzeuge im untersuchten Gleisabschnitt verbringen.
Der gerichtete längenbezogene Schallleistungspegel je Frequenzband aller in jedem Gleisabschnitt (j) vorbeifahrenden Fahrzeuge wird ermittelt
- für jedes Frequenzband (f) und
- für die Quellen A und B.
Er ist die energetische Summe der gerichteten, längenbezogenen Schallleistungspegel aller Geräuschanteile aller Fahrzeuge, die den speziellen j-ten Gleisabschnitt befahren. Der jeweilige Anteil geht auf Folgendes zurück:
- alle Fahrzeugarten(t)
- mit ihrer jeweiligen Geschwindigkeitv (s)
- mit ihren jeweiligen Betriebszuständen (konstante Geschwindigkeit oder Stand)(c)
- die einzelnen physikalischen Geräuschanteile (Roll-, Kurvenfahr-, und Antriebsgeräusche, aerodynamische und andere Geräusche wie etwa Brückendröhnen)(p).
Zur Berechnung des gerichteten Pegels der längenbezogenen SchallleistungLW",eq,T,dir,f (Eingabe in das Ausbreitungsmodell), ausgehend vom durchschnittlichen Verkehr auf demj-ten Gleisabschnitt wird folgende Gleichung verwendet:
|
|
(3.4) |

Dabei gilt:
| LW",eq,line,dir,x,f | gerichteter Pegel der längenbezogenen Schallleistung nach Gleichung (3.5) bzw. (3.6) |
| Tref | Referenzzeitraum, für den der durchschnittliche Verkehr bestimmt wird |
| X | Gesamtzahl vorhandener Kombinationen vonf, t, s, c undp für jedenj-ten Gleisabschnitt |
| f | Zähler für das Frequenzband |
| t | Zähler für die Fahrzeugart imj-ten Gleisabschnitt unter Berücksichtigung der Bremsbauart |
| s | Zähler für die Zuggeschwindigkeit: Die maßgebliche Geschwindigkeit v ist das Minimum aus der zulässigen Streckengeschwindigkeit und der fahrzeugbedingten zulässigen Höchstgeschwindigkeit im Regelverkehr. Besteht ein Zug aus mehreren Triebfahrzeugen, welche voneinander unterschiedliche Höchstgeschwindigkeiten aufweisen, wird von diesen die niedrigste fahrzeugbedingte Höchstgeschwindigkeit herangezogen. |
| c | Index des Betriebszustandes:
1 konstante Geschwindigkeit |
| p | Index der technischen Geräuschquellen:
1 Rollgeräusche |
Wenn ein stetiger Fluss vonQ Fahrzeugen pro Stunde mit einer Geschwindigkeit v angenommen wird, dann ist im Durchschnitt zu jedem Zeitpunkt eine äquivalente Anzahl vonQ/v-Fahrzeugen je Längeneinheit des Schienenabschnitts vorhanden. Die Schallemission des Fahrzeugflusses in Form des gerichteten längenbezogenen SchallleistungspegelsLW",eq,line,f (ausgedrückt in dB/m (re 10-12 W)) wird integriert durch:
| LW",eq,line,dir,x,f (ψ, Φ) = LW,O,dir,f (ψ, Φ) + 10 · lg (Q / (1.000 · v)) fürc = 1. |
(3.5) |
Dabei gilt:
| LW",eq,line,dir,x,f (ψ, Φ) | gerichteter Pegel der längenbezogenen Schallleistung |
| Q | ist die durchschnittliche Anzahl von Fahrzeugen im Referenzzeitraum bezogen auf alle Wochentage eines Kalenderjahres imj-ten Gleisabschnitt für die Fahrzeugartt, die maßgebliche Geschwindigkeit v und den Betriebszustandc |
| v | ist deren maßgebliche Geschwindigkeit im j-ten Gleisabschnitt für die Fahrzeugartt in km/h |
| LW,O,dir,f (ψ, Φ) | ist der gerichtete Schallleistungspegel des jeweiligen Geräuschs eines einzelnen Fahrzeugs in den Richtungen ψ und Φ in Bezug zur Fahrtrichtung des Fahrzeugs (siehe Abbildung 3.2). |
Im Falle einer stationären Geräuschquelle, wie etwa bei einem Betriebshalt, wird angenommen, dass das Fahrzeug für eine GesamtzeitTidle an einem Ort innerhalb eines Gleisabschnitts mit der Längel verbleibt, wobei stationäre Geräuschquellen im Leerlauf nur zu berücksichtigen sind, wenn sich Züge länger als 0,5 h im Stand befinden. Deshalb wird mit dem ReferenzzeitraumTref zur Einschätzung der Lärmbelastung (12 h/4 h/8 h) der gerichtete Schallleistungspegel je Längeneinheit auf diesem Gleisabschnitt wie folgt definiert:
|
LW",eq,line,x,f (ψ, Φ) =LW,O,dir,f (ψ, Φ) + 10 · lg (Tidle / (Tref · l)) fürc = 2. |
(3.6) |
Dabei gilt:
| Tidle | Gesamtzeit des jeweiligen Geräuschs eines einzelnen Fahrzeugs im Stand; Betriebshalt mindestens 0,5 h |
| Tref | Referenzzeitraum, während dessen ein Fahrzeug im Stand verbleibt |
| l | Länge des Gleisabschnittes, auf dem sich ein Fahrzeug im Stand befindet |
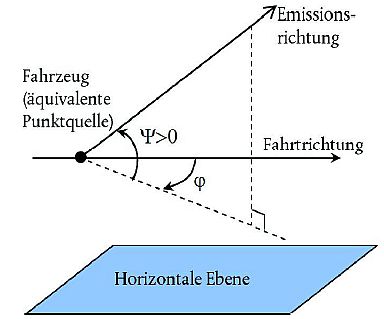
3.3.4 Richtwirkung
Generell errechnet sich der gerichtete Schallleistungspegel für jeden spezifischen Anteil der Quellen A und B wie folgt:
|
LW,O,dir,f (ψ, Φ) = LW,O,f + LW,dir,vert,f +ΔLW,dir,vert,f +ΔLW,dir,hor,f |
(3.7) |
Dabei gilt:
| ΔLW,dir,vert,f | ist die Korrektur für die vertikale Richtwirkung (dimensionslos) von ψ (Abbildung 3.2) , (Richtwirkungsmaß vertikal) |
| ΔLW,dir,hor,f | ist die Korrektur für die horizontale Richtwirkung (dimensionslos) von Φ (Abbildung 3.2) , (Richtwirkungsmaß horizontal) |
| ψ | ist der vertikale Winkel zwischen der Projektion der Emissionsrichtung auf die horizontale Ebene und der Emissionsrichtung (Abbildung 3.2) |
| Φ | ist der horizontale Winkel zwischen der Fahrtrichtung und der Projektion der Emissionsrichtung auf die horizontale Ebene (Abbildung 3.2) |
Abbildung 3.2: Geometrische Definition
Für jede Kombination aus Fahrzeug, Fahrbahnart, Geschwindigkeit und Betriebszustand wird, unter Berücksichtigung ihrer besonderen Richtwirkung, für jede spezifische Geräuschquelle ein gerichteter SchallleistungspegelLW,O,dir,f (ψ, Φ) berechnet:
- für jedes Frequenzband (f),
- für jeden Gleisabschnitt (j),
- für jede Quellenhöhe (h):
- Quelle A bei 0,5 m und
- Quelle B bei 4,0 m.
Das horizontale Richtwirkungsmaß ΔL,w,dir,hor,f wird in der horizontalen Ebene bestimmt und kann als Dipol für Roll-, impulshaltige (Schienenstöße usw.), Kreisch-, Brems-, Gebläse- und aerodynamische Geräusche angesehen werden. Es wird für jedesf-te Frequenzband angegeben durch:
|
ΔLW,dir,hor,f = 10 · lg(0,01 + 0,99 · sin2 Φ) . |
(3.8) |
Für alle Anteile der Quelle A wird das vertikale Richtwirkungsmaß ΔLW,dir,vert, A,f in der vertikalen Ebene als Funktion der Mittenbandfrequenzfm jedes einzelnenf-ten Frequenzbands bestimmt. Es wird für den Bereich - π/2 < ψ < π/2 angegeben durch:
|
|
(3.9) |

Für Quelle B wird nur für die aerodynamischen Anteile das vertikale Richtwirkungsmaß ΔLW,dir,vert,B,f berücksichtigt. Dieses ist für alle Frequenzbänder gleich und berechnet sich zu:
|
ΔLW,dir,vert,B,f = 10 · lg(cos2 ψ) für ψ < 0. |
(3.10) |
Für ψ > 0 sowie für alle anderen Geräuschanteile von Quelle B gilt:
|
ΔLW,dir,vert,B,f = 0. |
(3.11) |
3.3.5 Rollgeräusche
3.3.5.1 Berechnungsmodell
Die Berechnung des Rollgeräuschs erfolgt durch die Betrachtung der Anregung von Schwingungen am Kontaktpunkt zwischen Schiene und Rad und deren Übertragung auf die Komponenten Rad, Fahrbahn und Aufbauten (Behälter). Die für die Anregung der Schwingungen ursächlichen Größen Rad- und Schienenrauheit bilden zusammen mit dem Kontaktfilter bei der jeweils betrachteten Geschwindigkeit die Gesamtrauheit. Das Rollgeräusch berechnet sich dann aus der Gesamtrauheit durch Betrachtung der drei Übertragungswege Fahrbahn, Rad/Drehgestell und Aufbauten und Anwendung der jeweiligen Übertragungsfunktionen.
Bremsgeräusche sind bei der Ermittlung der Rollgeräusche durch die Verwendung einer Mindestgeschwindigkeit (Eisenbahnfahrzeuge: 50 km/h, Straßenbahn- und U-Bahn-Fahrzeuge: 30 km/h) berücksichtigt.
Abbildung 3.3: Schema der Verwendung der verschiedenen Definitionen für Rauheit und Übertragungsfunktionen

3.3.5.2 Rad- und Schienenrauheit
Rollgeräusche werden hauptsächlich durch Schienen- und Radrauheit im Wellenlängenbereich 5 bis 500 mm hervorgerufen.
Der RauheitsgradLr wird definiert als
|
Lr = 10 · lg (r /ro)2. |
(3.12) |
Dabei gilt:
| ro = 1µm | Referenzwert, |
| r | Effektivwert (rms) der vertikalen Abstände [µm] der Oberfläche von ihrem Mittelwert, gemessen über eine bestimmte Schienenlänge, oder den gesamten Radumfang. |
Das RauheitsspektrumLr(λ) ist die spektrale Dichtefunktion der Oberflächenrauheit und bildet das tatsächliche Oberflächenprofil als Überlagerung harmonischer Wellen unterschiedlicher Wellenlängenλ mit ihren jeweiligen Amplituden ab.
Die Schienenrauheit (schienenseitige Rauheit) für dasi-te Wellenzahlband wird definiert alsLr,tr,i.
Analog wird die Radrauheit (fahrzeugseitige Rauheit) für dasi-te Wellenzahlband definiert alsLr,veh,i .
Der Grad der effektiven Gesamtrauheit für dasi-te WellenzahlbandLr,tot,i wird zur Berücksichtigung der Filterwirkung der Kontaktfläche zwischen Schiene und Rad definiert als die Pegelsumme aus den Rauheiten der Schiene und des Rades, zuzüglich des KontaktfiltersA3,i:
|
Lr,tot,i = 10 · lg(10 Lr,tr,i/10Lr, ν eh,i/10) +A3,i. |
(3.13) |
Die effektive Gesamtrauheit wird dabei als Spektrum der Wellenlänge λ ausgedrückt.
Für den Zweck dieser Vorschrift ist die effektive Gesamtrauheit für jedenj-ten Gleisabschnitt und jedet-te Fahrzeugart bei ihrer entsprechenden Geschwindigkeitv zu verwenden und in den Frequenzbereich zu transformieren mitLr,tot(fc) =Lr,tot(λ) .
Dabei gilt:fc = v / λ, mit der Zuggeschwindigkeitv in m/s, der Wellenlänge λ in m und der zu der Mittenwellenlänge λ bei der Geschwindigkeit v korrespondierenden Mittenfrequenzfc in Hz. Die so ermittelten Pegelwerte bei den Mittenfrequenzenfc müssen für die weitere Berechnung auf die in dieser Vorschrift zu verwendenden Mittenfrequenzenfm übertragen werden, umLr,tot,f zu bestimmen. In Analogie zu Gleichung (12)Verfahren zur Umrechnung der Rauheit aus dem Frequenz- in den Wellenlängenbereich gemäß DIN CEN/TR 16891:2017-03; DIN SPEC 38451:2017-03, Bahnanwendungen - Akustik - Messverfahren für kombinierte Rauheit, Gleisabklingraten und Übertragungsfunktionen; Deutsche Fassung CEN/TR 16891:2016, geschieht dies unter Verwendung von
|
|
(3.14) |

Dabei sindfc+ undfc- mitfc+ >fm >fc- die obere bzw. die untere benachbarte Frequenz im Frequenzspektrumfc für die Mittenfrequenzfm im f-ten Frequenzband.
Die KoeffizientenLr,νeh,i undLr,tr,i für die jeweiligen Bremsbauarten und Schienenzustände sind in den Tabellen B-1 und B-2 der BUB-D aufgeführt.
3.3.5.3 Kontaktfilter
Der Kontaktfilter ist abhängig vom Schienen- und Radtyp sowie von der Radlast. Er berücksichtigt die filternde Wirkung der Kontaktfläche von Schiene und Rad.
Die Koeffizienten für den KontaktfilterA3,i sind in Tabelle B-3 der BUB-D für die in Deutschland verkehrenden Fahrzeuge der Eisenbahnen und Straßenbahnen aufgeführt.
3.3.5.4 Übertragungsfunktionen von Fahrzeug (Rad/Drehgestell und Aufbauten) und Fahrbahn
Es werden frequenzabhängig drei geschwindigkeitsunabhängige ÜbertragungsfunktionenLH,tr,f, LH,veh,f undLH,sup,f bestimmt: die erste für jedenj-ten Gleisabschnitt und die beiden anderen für jede t-te Fahrzeugart. Sie setzen den Grad der effektiven Gesamtrauheit in Bezug zum Schallleistungspegel der Fahrbahn und der Fahrzeuge (Rad/Drehgestell und Aufbauten).
Der Aufbautenanteil wird nur für Güterwagen berücksichtigt. Somit wird bei den Rollgeräuschen der Anteil der Fahrbahn und des Fahrzeugs durch diese Transferfunktionen und den Grad der effektiven Gesamtrauheit vollständig beschrieben.
Die Ausgangswerte für die Berechnung des Rollgeräusches sind die effektive GesamtrauheitLr,tot,f als Funktion der Fahrzeuggeschwindigkeitv, die Übertragungsfunktionen von Fahrbahn (LH,tr,f) und Fahrzeug (LH,veh,f bzw.LH,sup,f) sowie die GesamtachsenzahlNa.
Die Rollgeräusche berechnen sich für Quelle A:
|
LW,O,tr,f = Lr,tot,f + LH,tr,f + 10 · lg(Na) , |
(3.15) |
|
LW,O,veh,f = Lr,tot,f + LH,veh,f + 10 lg(Na) |
(3.16) |
|
LW,O,sup,f = Lr,tot,f + LH,supf + 10 · 1g(Na) , |
(3.17) |
wobeiNa die Anzahl der Achsen je Fahrzeug für diet-te Fahrzeugart ist.
Das Gesamtrollgeräusch berechnet sich für Quelle A wie folgt:
|
LW,O,rol,A,f =10 · lg(10LW,O,tr,f/10 +10LW,O,veh,f/10 +10LW,O,sup,f /10) . |
(3.18) |
Die Koeffizienten für die Berechnung der Übertragungsfunktionen für FahrbahnenLH,tr,f , FahrzeugeLH,veh,f und AufbautenLH,sup,f sowie die FahrbahnzuschlägeCtr,f für die Fahrbahnen der Straßenbahn- und U-Bahn-Fahrzeuge sind in den Tabellen B-4 bis B-7 der BUB-D aufgeführt.
Für die Ermittlung des FahrbahnrollgeräuschesLW,O,tr,f von Straßenbahn- und U-Bahn-Fahrzeugen wird die Fahrbahntransferfunktion für "Betonschwellen im Schotterbett" herangezogen. Der Einfluss anderer Fahrbahnarten auf das Gesamtrollgeräusch von Quelle A wird durch die Verwendung der FahrbahnzuschlägeCtr,f nach Gleichung (3.3) berücksichtigt. Für die Fahrbahnart Schwellengleis (Holz- oder Betonschwellen) im Schotterbett istCtr,f = 0 zu setzen.
3.3.6 Impulshaltige Geräusche von Weichen und Schienenstößen
Impulshaltige Geräusche sind durch die Verwendung einer Mindestgeschwindigkeit (Eisenbahnfahrzeuge: 50 km/h, Straßenbahn- und U-Bahn-Fahrzeuge: 30 km/h) berücksichtigt.
3.3.7 Antriebsgeräusche
Die Antriebsgeräusche weisen im Allgemeinen zwar für die typischen Betriebsbedingungen wie gleichbleibende Geschwindigkeit, Abbremsen, Beschleunigen und Stand eine entsprechende Spezifik auf, doch werden nur die beiden Bedingungen "gleichbleibende Geschwindigkeit" (dies gilt auch beim Abbremsen und Beschleunigen der Züge) und "Stand" modelliert. Weiterhin werden nur die Schallleistungspegel der Antriebsgeräusche beim Maximum der Leistungsbedingungen berücksichtigt, was zu den GrößenLW,O,const,f =LW,O,idle,f führt.
Die Koeffizienten für AntriebsgeräuscheLW,O,idle,f für die in Deutschland eingesetzten Triebfahrzeuge sind in Tabelle B-8 der BUB-D für die beiden Quellen A und B zusammengestellt.
Für den Betriebszustand "Stand" können diese Daten regelmäßig angewendet werden.
Weil vielfach die Aggregate im Stand in ihrer Leistung zurückfahren, können für eine Ermittlung der Emissionen im Stand bei Bedarf auch Daten in Betracht kommen, die an einer örtlich eingesetzten Fahrzeugart erhoben worden sind.
3.3.8 Aerodynamische Geräusche
Aerodynamische Geräusche werden bei Geschwindigkeiten über 200 km/h berücksichtigt. Der Anteil aerodynamischer Geräusche wird als Funktion der Geschwindigkeit angegeben:
| 1) für Quelle A |
LW,O,aer,A,f = LW,ref,A,f + aA ·lg (v / vo) , |
(3.19) |
| 2) für Quelle B |
LW,O,aer,B,f = LW,ref,B,f + aB ·lg (v / vo) . |
(3.20) |
Dabei gilt:
| v | Fahrzeuggeschwindigkeit fürv > 200 km/h |
| vo | Geschwindigkeit, ab der aerodynamische Geräusche dominant sind und die auf 300 km/h festgelegt ist |
| LW,ref,A,f | Referenzschallleistungspegel nach Tabelle B-9 der BUB-D für das Drehgestell. Zuordnung: Quelle A |
| LW,ref,B,f | Referenzschallleistungspegel nach Tabelle B-9 der BUB-D für die Stromabnehmeraussparung. Zuordnung: Quelle B |
| aA = 50 | Koeffizient für aerodynamische Geräusche für das Drehgestell |
| aB = 50 | Koeffizient für aerodynamische Geräusche für die Stromabnehmeraussparung |
3.4 Zusätzliche Einflüsse
3.4.1 Bahnübergänge
Für die Modellierung von Bahnübergängen ist die Fahrbahn-Übertragungsfunktion Feste Fahrbahn/Bahnübergänge zu verwenden (Tabelle B-4 der BUB-D). Dabei ist für die Länge des Gleisabschnittes "Bahnübergang" die doppelte Straßenbreite zu verwenden.
3.4.2 Korrektur für die Schallabstrahlung von Brücken und Viadukten
Für die Brückenemission wird als zusätzliche Geräuschquelle ein ZuschlagCbr auf die Rollgeräusche verwendet mit
|
LW,O,rol+br,A,f = LW,O,rol,A,f + Cbr . |
(3.21) |
Dabei gilt:
| Cbr | vom Brückentyp abhängige Konstante in dB. Für Korrekturwerte siehe Tabelle B-10 der BUB-D; |
| LW,O,rol,A,f | Schallleistungspegel der Rollgeräusche nach Gleichung (3.18) in dB. |
Zur Bestimmung vonLW,O,rol,A,f ist die Fahrbahntransferfunktion "Betonschwellen im Schotterbett" zu verwenden. Der Einfluss der Fahrbahn ist in den Zuschlägen mitberücksichtigt.
3.4.3 Kurvenfahrgeräusch
Bei der Modellierung von Kurvengeräuschen wird für Eisenbahnfahrzeuge in Gleichung (3.1), abhängig vom BogenhalbmesserR des Gleisabschnittes, für alle Frequenzen folgender ZuschlagCcu vergeben:
| Ccu | = 8 dB, für R < 300 m (Krümmung KH), |
| = 3 dB, für 300 m ≤ R < 500 m (Krümmung KM), | |
| = 0 dB, für R ≥ 500 m (Krümmung KN). |
Falls dauerhaft wirksame Vorkehrungen gegen das Auftreten von Quietschgeräuschen getroffen werden, verringert sich der ZuschlagCcu für alle Bogenhalbmesser mitR < 500 m um 3 dB.
Der Anteil des Kurvenfahrgeräusches ist bei Gleisabschnitten anzuwenden, bei denen der Radius auf mindestens 50 m der Strecke in den oben genannten Bereichen liegt.
Für die Modellierung von Kurvengeräuschen bei Straßenbahn- und U-Bahn-Fahrzeugen ist für Bogenhalbmesser mitR < 200 m zunächst bei der Berechnung des Rollgeräusches eine Mindestgeschwindigkeit von 50 km/h zu verwenden. Im Falle von dauerhaft wirksamen Vorkehrungen gegen das Auftreten von Quietschgeräuschen sind damit die Kurvengeräusche berücksichtigt. Andernfalls ist zusätzlich (zur erhöhten Mindestgeschwindigkeit) ein KurvenzuschlagCcu in Gleichung (3.3) zu berücksichtigen:
| Ccu | = 4 dB, für R < 200 m, ohne dauerhaft wirksame Maßnahmen, |
| = 0 dB, für alle anderen Situationen. |
Unter dauerhaft wirksamen Vorkehrungen gegen das Auftreten von Quietschgeräuschen versteht man beispielsweise
- Behandlungsmaßnahmen am Schienenkopf,
- Radabsorber (d),
- Spurkranzschmiereinrichtungen.
3.4.4 Weitere eisenbahnbezogene Schallquellen
Rangier- und Umschlagbahnhöfe werden wie Industrie- und Gewerbeanlagen (feste Schallquellen) gemäß Kapitel 4, Industrie- und Gewerbelärm, modelliert.
4 Industrie- und Gewerbelärm
4.1 Verwendete Symbole
Alle im Folgenden aufgeführten Formelzeichen werden in Tabelle 4.1 aufgeführt.
Tabelle 4.1: Formelzeichen, Einheiten und Bedeutung
| Formelzeichen | Einheit | Bedeutung |
| CW | dB | Korrekturwert für Betriebszeiten |
| l | m | Gesamtlänge der Quelle |
| LW | dB | Schallleistungspegel |
| LW" | dB | Längenbezogener Schallleistungspegel |
| ΔLW,dir,xyz(x, Y, z) | dB | Richtwirkungsmaß |
| LW"" | dB | Flächenbezogener Schallleistungspegel |
| n | - | Anzahl Fahrzeugdurchfahrten je Zeitraum |
| T | h | Aktive Zeit der Quelle je Zeitraum im Jahresdurchschnitt |
| TO | h | Referenzzeitraum 1 h |
| Tref | - | Referenzzeitraum H |
| v | km/h | Geschwindigkeit des Fahrzeugs |
4.2 Beschreibung der Quellen
4.2.1 Klassifizierung der Quellenarten (Punkt, Linie, Fläche)
Die Quellen von Industrie- und Gewerbelärm weisen sehr unterschiedliche Ausmaße auf. Es kann sich um große Industrieanlagen oder auch kleine konzentrierte Quellen handeln wie kleine Werkzeuge oder Maschinen in einer Fabrik. Deshalb bedarf es eines geeigneten Modellierungsverfahrens für die jeweilige zu bewertende Quelle. Je nach Größe und Verteilung mehrerer Einzelquellen über eine Fläche, die alle zum selben Industriestandort gehören, können diese als Punktquellen, Linienquellen oder Flächenquellen modelliert werden. In der Praxis beruhen die Berechnungen der Schalleinflüsse stets auf Punktquellen, jedoch können mehrere Punktquellen verwendet werden, um eine komplexe Quelle darzustellen, die sich überwiegend über eine Linie oder eine Fläche erstreckt.
4.2.2 Anzahl und Position äquivalenter Schallquellen
Die realen Schallquellen werden mittels äquivalenter Schallquellen modelliert, die durch eine oder mehrere Punktquellen dargestellt werden, so dass die Gesamtschallleistung der realen Quelle der Summe der einzelnen Schallleistungen entspricht, die den verschiedenen Punktquellen zugeordnet werden.
Für die Festlegung der Anzahl zu verwendender Punktquellen gelten folgende allgemeine Regeln:
- Linien- oder Flächenquellen, deren größte Abmessung weniger als die Hälfte des Abstands zwischen der Quelle und dem Empfänger beträgt, können als einzelne Punktquellen modelliert werden, sofern sie gleiche Abstrahlbedingungen aufweisen.
- Quellen, deren größte Abmessung mehr als die Hälfte des Abstands zwischen der Quelle und dem Empfänger beträgt, sollten als eine Reihe nicht zusammenhängender Punktquellen in einer Linie oder als eine Reihe nicht zusammenhängender Punktquellen über eine Fläche so modelliert werden, dass für jede dieser Quellen die Bedingung des halben Abstands erfüllt ist. Die Verteilung über eine Fläche kann auch die vertikale Verteilung von Punktquellen einschließen.
- Für jede Quelle gilt, dass eine Verdoppelung der Quellenzahl im Quellenbereich (in allen Dimensionen) nicht unbedingt zu einem signifikant genaueren Ergebnis führt.
Die Position der äquivalenten Schallquellen lässt sich angesichts der Vielfalt an möglichen Konfigurationen eines Industrie- oder Gewerbestandorts nicht allgemein festlegen. Hier sind im Regelfall bewährte Praktiken anzuwenden.
4.2.3 Schallleistungsemission
4.2.3.1 Allgemeines
Die folgenden Angaben bilden den kompletten Satz von Eingangsdaten für Berechnungen der Schallausbreitung mit den für die Erstellung von Lärmkarten verwendeten Verfahren:
- Spektrum der abgestrahlten Schallleistungspegel in Oktavbändern,
- Betriebszeiten (Tag, Abend, Nacht, im Jahresdurchschnitt),
- Ort (Koordinaten x, y) und Höhe (z) der Schallquelle,
- Art der Quelle (Punkt, Linie, Fläche),
- Abmessungen und Ausrichtung,
- Betriebsbedingungen der Quelle,
- Richtwirkungsmaß der Quelle.
Für Punkt-, Linien- und Flächenquellen sind folgende Eigenschaften zu bestimmen:
- für eine Punktquelle: der SchallleistungspegelLW und das Richtwirkungsmaß;
- Bei Linienquellen ist zwischen zwei Arten zu unterscheiden:
- für Linienquellen, die Förderbänder, Rohrleitungen usw. darstellen: der Schallleistungspegel je Meter LängeLW" und das Richtwirkungsmaß als Funktion der beiden zur Achse der Quellenlinie orthogonalen Koordinaten;
- Linienquellen, die Fahrzeuge in Bewegung darstellen: der SchallleistungspegelLW und das Richtwirkungsmaß als Funktion der beiden zur Achse der Quellenlinie orthogonalen Koordinaten.
Der Schallleistungspegel je MeterLW" wird abgeleitet aus der Geschwindigkeit und der Anzahl der Fahrzeuge, die am Tage, am Abend und in der Nacht entlang dieser Linie fahren.
Der Korrekturwert für die Betriebszeiten, der zur Ermittlung der korrigierten Schallleistung zur Quellenschallleistung hinzuzurechnen ist, wird alsCW in dB wie folgt berechnet:
CW = 10lg [(l· n) / (1.000 · v · TO)]
(4.1)
Dabei gilt:
CW Korrekturwert für Betriebszeiten, v Geschwindigkeit des Fahrzeugs in km/h, n Anzahl der Fahrzeugdurchfahrten je Zeitraum, l Gesamtlänge der Quelle in m, TO Referenzzeitraum = 1 h; - für eine Flächenquelle: der Schallleistungspegel je QuadratmeterLW"" und keine Richtwirkung (wirkt horizontal oder vertikal).
Die Betriebszeiten sind ein wesentlicher Eingangswert für die Berechnung von Schallpegeln. Die Betriebszeiten sind für den Tag, den Abend und die Nacht anzugeben; kommen für die Ausbreitung verschiedene meteorologische Kategorien zur Anwendung, die jeweils für die Zeiträume Tag, Abend und Nacht definiert sind, so ist eine detailliertere Verteilung der Betriebszeiten in Teilzeiträumen anzugeben, die der Verteilung der meteorologischen Kategorien entsprechen. Diese Angaben müssen auf einem Jahresdurchschnitt beruhen.
Der Korrekturwert für die Betriebszeiten, der für die Ermittlung der korrigierten Schallleistung zur Quellenschallleistung hinzuzurechnen ist, die für die Berechnungen über den jeweiligen Zeitraum zu verwenden ist, wird als CW in dB wie folgt berechnet:
|
CW = 10lg (T / Tref) . |
(4.2) |
Dabei gilt:
| CW | Korrekturwert für Betriebszeiten; |
| T | ist die aktive Zeit der Quelle je Zeitraum im Jahresdurchschnitt in Stunden; |
| Tref | ist der Referenzzeitraum in Stunden (z.B. Tag mit 12 Stunden, Abend mit 4 Stunden, Nacht mit 8 Stunden). |
Für die dominierenderen Quellen ist der Korrekturwert für die Betriebszeiten im Jahresdurchschnitt mit mindestens einer Toleranz von 0,5 dB anzusetzen, um eine akzeptable Genauigkeit zu erreichen (dies ist gleichbedeutend mit einer Unsicherheit von weniger als 10 % bei der Festlegung der aktiven Zeit der Quelle).
4.2.3.2 Richtwirkung der Quelle
Die Richtwirkung einer Quelle ist in hohem Maße abhängig von der Position der äquivalenten Schallquelle in Bezug auf Flächen in der Nähe. Da bei der Ausbreitungsmethode die Reflexion von Flächen in der Nähe ebenso wie deren schalldämpfende Wirkung berücksichtigt werden, ist der Position dieser Flächen besondere Beachtung zu schenken. Üblicherweise werden die beiden folgenden Fälle unterschieden:
- Der Schallleistungspegel und das Richtwirkungsmaß einer Quelle werden bestimmt und bezogen auf eine bestimmte reale Quelle angegeben, wenn diese sich im freien Schallfeld befindet (ohne Berücksichtigung des Geländeeinflusses). Dies erfolgt gemäß den Festlegungen zur Ausbreitung, wenn angenommen wird, dass keine Fläche in der Nähe weniger als 0,01 m von der Quelle entfernt ist und Flächen in einer Entfernung von 0,01 m oder mehr in die Berechnung der Ausbreitung einbezogen werden.
- Der Schallleistungspegel und das Richtwirkungsmaß einer Quelle werden bestimmt und relativ zu einer bestimmten realen Quelle angegeben, wenn diese sich an einem bestimmten Ort befindet und deshalb der Schallleistungspegel und das Richtwirkungsmaß der Quelle tatsächlich "äquivalent" sind, da sie die Modellierung des Einflusses der Flächen in der Nähe einschließt. Dies erfolgt in einem "halbfreien Schallfeld" gemäß der Definition der Schallausbreitung. In diesem Fall sind die modellierten Flächen in der Nähe bei der Berechnung der Ausbreitung nicht zu berücksichtigen.
Das Richtwirkungsmaß ist in der Berechnung als ein Faktor ΔLW,dir,xyz(x, y, z) auszudrücken, der zum Schallleistungspegel hinzuzurechnen ist, um den korrekten gerichteten Schallleistungspegel einer Referenzschallquelle bei Schallausbreitung in der angegebenen Richtung zu erhalten. Der Faktor kann als Funktion des durch(x, y, z) definierten Richtungsvektors mit √(x2 + y2 + z2 = 1) angegeben werden. Dieses
Richtwirkungsmaß kann auch mittels anderer Koordinatensysteme, wie etwa Winkelkoordinatensysteme, ausgedrückt werden.
5 Schallausbreitung
5.1 Anwendungsbereich
In diesem Kapitel wird das Verfahren zur Berechnung der Dämpfung von Schall während seiner Ausbreitung im Freien beschrieben. Bei Kenntnis der Quelleigenschaften berechnet dieses Verfahren den äquivalenten Langzeit-Dauerschallpegel am Immissionsort für zwei spezielle Klassen atmosphärischer Ausbreitungsbedingungen:
- günstige Ausbreitungsbedingungen, gekennzeichnet durch eine Zunahme der effektiven Schallgeschwindigkeit mit dem Abstand vom Boden und damit Abwärtsbrechung von der Quelle zum Immissionsort
- homogene Ausbreitungsbedingungen, gekennzeichnet durch eine vom Abstand vom Boden unabhängige effektive Schallgeschwindigkeit zwischen Quelle und Immissionsort
Ausbreitungsbedingungen, in denen die effektive Schallgeschwindigkeit mit dem Abstand vom Boden abnimmt und dadurch Aufwärtsbrechung von der Quelle zum Immissionsort erzeugt, werden im Folgenden näherungsweise wie homogene Ausbreitungsbedingungen behandelt.
Das in diesem Kapitel beschriebene Berechnungsverfahren gilt für Industrie- und Gewerbeanlagen sowie für Straßen- und Schienenverkehrsanlagen. Beim Luftverkehr fallen nur Tätigkeiten am Boden in den Anwendungsbereich des Verfahrens, Starts und Landungen dagegen nicht.
Das Verfahren liefert Ergebnisse je Oktavband von 63 Hz bis 8 kHz. Die Berechnungen werden für jede nominelle Mittenfrequenz vorgenommen.
Das in diesem Kapitel beschriebene Berechnungsverfahren betrachtet nur punktförmige Schallquellen. Räumlich ausgedehnte Quellen wie Flächen- und Linienquellen sind daher näherungsweise durch Punktquellen zu ersetzen. Die Wahl geeigneter Ersatzquellen hängt vom räumlichen Kontext von Quelle und Immissionsort ab und bedarf gegebenenfalls über dieses Berechnungsverfahrens hinausgehende Festlegungen.
5.2 Normative Verweisungen
Die folgenden normativen Dokumente enthalten Festlegungen, die durch Verweisung in diesem Text Bestandteil der vorliegenden Veröffentlichung sind.
- DIN EN 1793-1:2013-04, Lärmschutzvorrichtungen an Straßen - Prüfverfahren zur Bestimmung der akustischen Eigenschaften - Teil 1: Produktspezifische Merkmale der Schallabsorption
- DIN EN 61672-1:2003-10, Elektroakustik - Schallpegelmesser - Teil 1: Anforderungen
- ISO 9613-1:1993-06, Akustik; Dämpfung des Schalls bei der Ausbreitung im Freien; Teil 1: Berechnung der Schallabsorption durch die Luft
5.3 Definitionen und verwendete Symbole
Alle in diesem Kapitel verwendeten Abstände, Höhen und Dimensionen werden in Metern (m) angegeben.
Die Bezeichnung ` steht für den Abstand in drei Dimensionen (3D) zwischen den Punkten M und N, also die Länge der diese Punkte verbindenden Strecke.
steht für den Abstand in drei Dimensionen (3D) zwischen den Punkten M und N, also die Länge der diese Punkte verbindenden Strecke.
Die Bezeichnung steht für die Länge des gebogenen Ausbreitungswegs zwischen den Punkten M und N bei günstigen Bedingungen.
Die Bezeichnung (M,N) als Index verweist auf den Ausbreitungsweg zwischenM undN.
Reale Höhen werden vertikal im rechten Winkel zur horizontalen Ebene gemessen. Höhen von Punkten über dem lokalen Boden werden mit h bezeichnet, absolute Höhen von Punkten und absolute Höhen des Bodens mitH.
Zur Berücksichtigung des Reliefs des Geländes entlang eines Ausbreitungswegs werden sogenannte Mittlere Grundlinien (MGL) eingeführt. Der Begriff "äquivalente Höhe" bezeichnet den Abstand eines Punktes von der MGL und wird mit z bezeichnet.
Werden die Begriffe "links" und "rechts" verwendet, so ist von einer Betrachtungsposition auszugehen, aus der die Quelle links und der Immissionsort rechts liegt.
Mit dem GroßbuchstabenL ohne den IndexA werden bandbegrenzte Schallpegel in Dezibel (dB) je Frequenzband bezeichnet. Bewertete Schallpegel in Dezibel (A) (dB(A)) tragen dagegen den IndexA.
In den Gleichungen dieses Kapitels werden folgende Symbole verwendet:
Tabelle 5.1: Formelzeichen, Einheiten und Bedeutung
| Formelzeichen | Einheit | Bedeutung |
| aatm | dB/km | Koeffizient der Dämpfung von Luft in dB/km |
| ar | - | Absorptionskoeffizient der Oberfläche des Reflektors |
 | m | Radius des gekrümmten Ausbreitungswegs bei günstigen Ausbreitungsbedingungen |
| δ | m | allgemeine Weglängendifferenz |
| δ* | m | allgemeine Weglängendifferenz in Bezug auf die an der quellseitigen MGL gebildete SpiegelquelleS* und den an der immissionsortseitigen MGL gebildeten SpiegelimmissionsortR* |
| δD | m | allgemeine Weglängendifferenz durch den PunktD |
| δ*D | m | allgemeine Weglängendifferenz durch den PunktD in Bezug auf die an der quellseitigen MGL gebildete SpiegelquelleS* und den an der immissionsortseitigen MGL gebildeten SpiegelimmissionsortR* |
| δF | m | Weglängendifferenz bei günstigen Ausbreitungsbedingungen |
| δH | m | Weglängendifferenz bei homogenen Ausbreitungsbedingungen |
| δR | m | Weglängendifferenz zur Berechnung der Dämpfung durch Retrobeugung |
| Δdif,F,(S,R) | dB | Dämpfung aufgrund von Beugung zwischen der QuelleS und dem ImmissionsortR bei günstigen Ausbreitungsbedingungen |
| Δdif,H,(S,R) | dB | Dämpfung aufgrund von Beugung zwischen der QuelleS und dem ImmissionsortR bei homogenen Ausbreitungsbedingungen |
| Δground,F,(O,R) | dB | Bodendämpfung im Bereich des Immissionsortes, bewertet mittels der Beugung im Bereich des Immissionsortes bei günstigen Ausbreitungsbedingungen |
| Δground,F,(S,O) | dB | Bodendämpfung im Quellbereich, bewertet mittels der Beugung im Quellbereich bei günstigen Ausbreitungsbedingungen |
| Δground,H,(O,R) | dB | Bodendämpfung im Bereich des Immissionsortes, bewertet mittels der Beugung im Bereich des Immissionsortes bei homogenen Ausbreitungsbedingungen |
| Δground,H,(S,O) | dB | Bodendämpfung im Quellbereich, bewertet mittels der Beugung im Quellbereich bei homogenen Ausbreitungsbedingungen |
| Δretrodif | dB | Dämpfung durch Retrobeugung |
| λ | m | Wellenlänge bei der nominellen Mittenfrequenz des betrachteten Oktavbands |
 | m | modifizierte äquivalente Höhe des "linken" Begrenzungspunktes der MGL |
 | m | modifizierte äquivalente Höhe des "rechten" Begrenzungspunktes der MGL |
| a | - | Steigungsparameter der MGL |
| at | - | Steigungsparameter dest-ten Segments des Hindernisprofils |
| A | m3 | Zwischenergebnis zur Berechnung der MGL |
| Ai | dB | A-Bewertungskorrektur (siehe Tabelle 5.2) |
| Aatm | dB | Dämpfung aufgrund von Luftabsorption |
| Aboundary,F | dB | Dämpfung aufgrund von Wechselwirkungen mit dem Boden und Hindernissen bei günstigen Ausbreitungsbedingungen |
| Aboundary,H | dB | Dämpfung aufgrund von Wechselwirkungen mit dem Boden und Hindernissen bei homogenen Ausbreitungsbedingungen |
| Adif,F | dB | Dämpfung aufgrund von Beugung inklusive Bodendämpfung bei günstigen Ausbreitungsbedingungen |
| Adif,H | dB | Dämpfung aufgrund von Beugung inklusive Bodendämpfung bei homogenen Ausbreitungsbedingungen |
| Adiv | dB | Dämpfung aufgrund geometrischer Divergenz |
| Aground,F | dB | Bodendämpfung bei günstigen Ausbreitungsbedingungen |
| Aground,F,min | dB | Untergrenze der Bodendämpfung bei günstigen Ausbreitungsbedingungen |
| Aground,H | dB | Bodendämpfung bei homogenen Ausbreitungsbedingungen |
| Aground,H,min | dB | Untergrenze der Bodendämpfung bei homogenen Ausbreitungsbedingungen |
| b | m | Abschnittsparameter der MGL |
| bt | m | Abschnittsparameter dest-ten Segments des Hindernisprofils |
| B | m2 | Zwischenergebnis zur Berechnung der MGL |
| c | m/s | Geschwindigkeit des Schalls in Luft, angenommen als 340 m/s |
| C"" | - | Koeffizient zur Berücksichtigung von Mehrfachbeugung |
| Cf | m | frequenzabhängige Längenkorrektur bei der Berechnung der Bodendämpfung |
| d | m | 3D-Schrägentfernung zwischen Quelle und Immissionsort, bzw. für Ausbreitungswege in der lateralen Ausbreitungsebene die Länge des gebeugten Ausbreitungswegs von der Quelle zum Immissionsort bei homogenen Ausbreitungsbedingungen |
| D | - | Punkt des Hindernisprofils, der bei freier Sichtverbindung zwischen Quelle und Immissionsort die größte Weglängendifferenz erzeugt |
| dp | m | Länge des auf die MGL projizierten Abstands der Begrenzungspunkte der MGL |
| eF | m | Länge des Teilabschnitts eines gebeugten Ausbreitungswegs zwischen erstem und letztem Beugungspunkt bei günstigen Ausbreitungsbedingungen |
| eH | m | Länge des Teilabschnitts eines gebeugten Ausbreitungswegs zwischen erstem und letztem Beugungspunkt bei homogenen Ausbreitungsbedingungen |
| E | - | Schnittpunkt der vertikalen Verlängerung eines Beugungspunktes mit der geraden Verbindungslinie zwischen Quelle und Immissionsort |
| fm | Hz | nominelle Mittenfrequenz des betrachteten Oktavbands (siehe Tabelle 5.2) |
| G | - | Bodenfaktor zur Beschreibung der Absorptionseigenschaften des Bodens |
| Gm | - | generischer Bodenfaktor |
| Gpath | - | Mittelwert des Bodenfaktors für einen Ausbreitungsweg |
| G"path | - | korrigierter Mittelwert des Bodenfaktors für einen Ausbreitungsweg |
| Gs | - | Bodenfaktor unterhalb der Quelle |
| Gw | - | generischer Bodenfaktor |
| Ht | m | absolute Höhe dest-ten Stützpunktes des Hindernisprofils |
| i | - | Index für das betrachtete Oktavband |
| k | m-1 | Wellenzahl für Luftschall der nominellen Mittenfrequenz des betrachteten Frequenzbandes |
| Formelzeichen | Einheit | Bedeutung |
| LAeq,LT | dB(A) | A-bewerteter Gesamt-Langzeit-Dauerschallpegel |
| LF | dB | Schallpegel bei günstigen Ausbreitungsbedingungen |
| LH | dB | Schallpegel bei homogenen Ausbreitungsbedingungen |
| LLT | dB | Langzeit-Dauerschallpegel für einen Ausbreitungsweg |
| Lq,m,LT | dB | Langzeit-Dauerschallpegel-Beitrag der Quelleq entlang des Ausbreitungswegsm |
| Ltot,LT,i | dB | Gesamt-Langzeit-Dauerschallpegel im Oktavbandi |
| LW,O,dir | dB | gerichteter Schallleistungspegel, und zwar in Richtung des quellnächsten Beugungspunktes, wenn der Ausbrei-tungsweg Beugung enthält, und sonst in Richtung des ImmissionsortesR |
| LW,S | dB | Schallleistungspegel der Originalschallquelle |
| LW,S" | dB | Schallleistungspegel der Spiegelschallquelle |
| m | - | Index für den Ausbreitungsweg in Bezug auf ein bestimmtes Quelle-Immissionsort-Paar |
| M | - | allgemeiner Punkt |
| n | - | Anzahl der Beugungspunkte eines Ausbreitungswegs |
| N | - | allgemeiner Punkt |
| O | - | Beugungspunkt |
| p | - | Wahrscheinlichkeit des Auftretens günstiger Ausbreitungsbedingungen entlang eines bestimmten Ausbreitungswegs |
| P | - | fiktiver Beugungspunkt bei der Berechnung der Retrobeugung |
| q | - | Index für die Punktquelle in Bezug auf einen bestimmten Immissionsort |
| R | - | Immissionsort |
| R* | - | an der MGL gespiegelter Immissionsort |
| S | - | Quellpunkt |
| S* | - | an der MGL gespiegelter Quellpunkt |
| S" | - | an einem Reflektor gespiegelter Quellpunkt |
| t | - | Index der Stützpunkte des Hindernisprofils |
| T | - | Anzahl der Stützpunkte des Hindernisprofils |
| w | m-i | Korrekturterm bei der Berechnung der Bodendämpfung |
| xl | m | x-Koordinate des "linken" Begrenzungspunktes der MGL |
| xr | m | x-Koordinate des "rechten" Begrenzungspunktes der MGL |
| xt | m | x-Koordinate des t-ten Stützpunktes des Hindernisprofils |
| z1 | m | äquivalente Höhe des "linken" Begrenzungspunktes der MGL |
| zr | m | äquivalente Höhe des "rechten" Begrenzungspunktes der MGL |
| zR | m | äquivalente Höhe des Immissionsortes |
| zS | m | äquivalente Höhe des Quellpunktes |
5.4 Überblick über die Berechnungsmethode
Die Berechnung des Gesamt-Langzeit-Dauerschallpegels an einem ImmissionsortR gliedert sich in folgende Schritte:
- Die Berechnungen erfolgen getrennt für jedes der acht Oktavbänder, gekennzeichnet durch den Indexi
 {1; 8}.
{1; 8}. - Alle für den Immissionsort R relevanten Quellen werden gesucht.
Dafür werden räumlich ausgedehnte Quellen durch Punktquellen ersetzt und beim Auftreten von Reflexionen zusätzliche Spiegelquellen gebildet.
Für den Immissionsort R entsteht so ein Satz zu betrachtender QuellenSi,q mitq{1;Qi}.
- Für jedes Quelle-Immissionsort-Paar (Si,q, R) wird ein Ausbreitungsweg in der vertikalen Ausbreitungsebene bestimmt. Für die Fälle, in denen auch seitliche Beugung berücksichtigt werden muss, sind bis zu zwei zusätzliche Ausbreitungswege in der lateralen Ausbreitungsebene zu bestimmen.
- Für jeden Ausbreitungsweg erfolgt nun die Berechnung der Dämpfung bei günstigen Ausbreitungsbedingungen und bei homogenen Ausbreitungsbedingungen, um aus beiden Teilergebnissen den Langzeit-Dauerschallpegel für den betrachteten Ausbreitungsweg zu berechnen.
- Die Langzeit-Dauerschallpegel aller relevanten Quellen und aller dazugehörenden Ausbreitungswege werden energetisch zum Gesamt-Langzeit-Dauerschallpegel im betrachteten Oktavband aufsummiert.
- Der A-bewertete Gesamt-Langzeit-Dauerschallpegel am ImmissionsortR ergibt sich durch energetische Addition der Gesamt-Langzeit-Dauerschallpegel aller acht Oktavbänder unter Anwendung des A-Filters.
5.4.1 Gesamt-Langzeit-Dauerschallpegel am PunktR in Dezibel A (dB(A))
Der Gesamt-Langzeit-Dauerschallpegel in Dezibel A (dB(A)) am ImmissionsortR wird durch Summierung der Gesamt-Langzeit-Dauerschallpegel in jedem einzelnen Frequenzband bestimmt:
|
|
(5.1) |
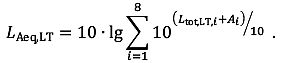
Dabei gilt:
| i | ist der Index für das Oktavband. |
| Ltot,LT,i | ist der Gesamt-Langzeit-Dauerschallpegel am ImmissionsortR im Oktavbandi. |
| Ai | ist die A-Bewertungskorrektur (siehe Tabelle 5.2). |
Der PegelLAeq, LT stellt das Endresultat dar, d. h. den A-bewerteten Gesamt-Langzeit-Dauerschallpegel am ImmissionsortRin einem bestimmten Referenzzeitraum (z.B. Tag oder Abend oder Nacht oder einer kürzeren Zeit am Tag, am Abend oder in der Nacht).
Tabelle 5.2: A-Korrektur gemäß DIN EN 61672-1:2003-10
| Indexi | nominelle Mittenfrequenz des Oktavbandsi in Hz | Ai in dB |
| 1 | 63 | -26,2 |
| 2 | 125 | -16,1 |
| 3 | 250 | -8,6 |
| 4 | 500 | -3,2 |
| 5 | 1.000 | 0,0 |
| 6 | 2.000 | 1,2 |
| 7 | 4.000 | 1,0 |
| 8 | 8.000 | -1,1 |
5.4.2 Gesamt-Langzeit-Dauerschallpegel am PunktR je Frequenzband
Der Gesamt-Langzeit-Dauerschallpegel am ImmissionsortR wird für jedes Frequenzband getrennt durch die energetische Summierung der Beiträge aller Quellen und aller dazugehörenden Ausbreitungswege errechnet:
|
|
(5.2) |
Der Indexi für das betrachtete Frequenzband wurde zur Verbesserung der Lesbarkeit weggelassen, und es gilt:
| q | ist der Index für die PunktquelleSq. |
| m | ist der Index für den Ausbreitungsweg vonSq nachR. |
| Lq,m,LT | ist der Beitrag der QuelleSq zum Dauerschallpegel am ImmissionsortR über den Ausbreitungswegm. |
5.4.3 Langzeit-Dauerschallpegel für einen Ausbreitungsweg vonSq nachR
Der Langzeit-Dauerschallpegel für einen Ausbreitungsweg von der PunktquelleSq zum ImmissionsortR wird aus dem Schallpegel bei günstigen Ausbreitungsbedingungen und dem bei homogenen Ausbreitungsbedingungen unter Berücksichtigung der Häufigkeitsverteilung beider Ausbreitungsbedingungen gebildet:
|
LLT = 10* lg (p · 10LF/10 + (1 -p) · 10LH/10) |
(5.3) |
Die Indizesi für das betrachtete Frequenzband,q für die betrachtete Punktquelle undm für den betrachteten Ausbreitungsweg wurden zur Verbesserung der Lesbarkeit weggelassen und es gilt:
| p | ist die Wahrscheinlichkeit des Auftretens günstiger Ausbreitungsbedingungen auf dem betrachteten Ausbreitungsweg vonSq nachR. |
| LF | ist der Beitrag der QuelleSq zum Dauerschallpegel am ImmissionsortR über den Ausbreitungsweg m bei günstigen Ausbreitungsbedingungen. |
| LH | ist der Beitrag der QuelleSq zum Dauerschallpegel am ImmissionsortR über den Ausbreitungswegm bei homogenen Ausbreitungsbedingungen. |
Handelt es sich bei der betrachteten Quelle um eine Spiegelquelle zur Berücksichtigung von Reflexionen, so wirdp als die Wahrscheinlichkeit des Auftretens günstiger Ausbreitungsbedingungen entlang der direkten Verbindungslinie von der Originalquelle zum ImmissionsortR angesetzt.
Gleiches gilt für seitlich gebeugte Ausbreitungswege.
| Für die Lärmkartierung ist für den Referenzzeitraum "Tag" ein Wert vonpDay = 0,50 , für den Referenzzeitraum "Abend" ein Wert vonpEvening = 0,75 und für den Referenzzeitraum "Nacht" ein Wert vonpNight = 1,00 zu verwenden. |
5.4.4 Schallpegel am ImmissionsortR für einen einzelnen Ausbreitungsweg
Der Beitrag der Punktquelleq zum Schallpegel am ImmissionsortR im Frequenzbandi über den Ausbreitungswegm ergibt sich aus dem Schallleistungspegel der Quelle und der Dämpfung auf dem Ausbreitungsweg:
|
LH = LW,O,dir - Adiv - Aatm - Aboundary,H , |
(5.4) |
|
LF = LW,O,dir - Adiv - Aatm - Aboundary,F . |
(5.5) |
Dabei gilt:
| LW,O,dir | ist der gerichtete Schallleistungspegel, und zwar in Richtung des quellnächsten Beugungspunktes, wenn der Ausbreitungsweg Beugung enthält, und sonst in Richtung des ImmissionsortesR. |
| Adiv | ist die Dämpfung aufgrund geometrischer Divergenz. |
| Aatm | ist die Dämpfung aufgrund von Luftabsorption. |
| Aboundary,H | ist die Dämpfung aufgrund von Wechselwirkungen mit dem Boden und Hindernissen bei homogenen Ausbreitungsbedingungen. |
| Aboundary,F | ist die Dämpfung aufgrund von Wechselwirkungen mit dem Boden und Hindernissen bei günstigen Ausbreitungsbedingungen. |
Die WechselwirkungstermeAboundary,F undAboundary,H enthalten Terme zur Beschreibung von Bodendämpfung und Beugungsdämpfung.
Für Ausbreitungswege in der vertikalen Ausbreitungsebene (siehe Abschnitt 5.5), die keine Beugung enthalten, gilt:
|
Aboundary,H = Aground,H, |
(5.6) |
|
Aboundary,F = Aground,F . |
(5.7) |
Dabei gilt:
| Aground,H | ist die Bodendämpfung bei homogenen Ausbreitungsbedingungen. |
| Aground,F | ist die Bodendämpfung bei günstigen Ausbreitungsbedingungen. |
Für gebeugte Ausbreitungswege in der vertikalen Ausbreitungsebene gilt:
|
Aboundary,H = Adif,H , |
(5.8) |
|
Aboundary,F = Adif,F . |
(5.9) |
Dabei gilt:
| Adif,H | ist die Dämpfung aufgrund von Beugung inklusive Bodendämpfung bei homogenen Ausbreitungsbedingungen. |
| Adif,F | ist die Dämpfung aufgrund von Beugung inklusive Bodendämpfung bei günstigen Ausbreitungsbedingungen. |
Für Ausbreitungswege in der lateralen Ausbreitungsebene gilt:
|
Aboundary,H = Aground,H +Δdif,H,(S,R) , |
(5.10) |
|
Aboundary,F = Aground,F +Δdif,H,(S,R) . |
(5.11) |
Dabei gilt:
| Δdif,H,(S,R) | ist die Dämpfung aufgrund von Beugung bei homogenen Ausbreitungsbedingungen zwischen dem QuellpunktS und dem ImmissionsortR. Dieser Term kommt bei Ausbreitungswegen in der lateralen Ausbreitungsebene sowohl bei homogenen als auch bei günstigen Ausbreitungsbedingungen zur Anwendung. |
5.5 Geometrische Betrachtungen
5.5.1 Schallausbreitungswege
Das Verfahren arbeitet mit einem geometrischen Modell, das aus einer Reihe zusammenhängender Boden- und Hindernisflächen besteht. Darin werden Schallausbreitungswege getrennt für homogene und günstige Ausbreitungsbedingungen und in jedem Oktavband einzeln nach folgendem Schema konstruiert:
Für jedes Quelle-Immissionsort-Paar wird ein Ausbreitungsweg in der vertikalen Ebene, die Quelle und Immissionsort enthält, der sogenannten vertikalen Ausbreitungsebene, bestimmt. Zunächst ist zu prüfen, ob eine freie Sichtverbindung zwischen Quelle und Immissionsort besteht. Dafür wird das Bodenprofil mit allen Hindernissen wie z.B. Gebäuden und Lärmschutzwällen zum sogenannten Hindernisprofil zusammengefügt. Die Sichtverbindung gilt als frei, wenn kein Punkt des Hindernisprofils oberhalb des direkten Schallstrahls von der Quelle zum Immissionsort liegt. Unter homogenen Ausbreitungsbedingungen ist der direkte Schallstrahl ein Geradenabschnitt, unter günstigen Ausbreitungsbedingungen ein Kreissegment.
5.5.1.1 Freie Sichtverbindung
Besteht eine freie Sichtverbindung zwischen Quelle und Immissionsort, so wird geprüft, ob ein Punkt des Hindernisprofils zwischen Quelle und Immissionsort in relevantem Maß Beugungsdämpfung erzeugt. Dafür wird für alle Punkte des Hindernisprofils zwischen Quelle und Immissionsort die (in diesem Fall negative) Weglängendifferenz δ berechnet und der PunktD mit dem größten δ ermittelt, genanntδD.
5.5.1.1.1 Freie Sichtverbindung mit Beugung
Der PunktD zerteilt den Ausbreitungsweg in einen quellseitigen und einen immissions-ortseitigen Teil. Für beide Teile wird eine eigene MGL berechnet. Die vom PunktD des Hindernisprofils erzeugte Beugung wird als relevant angesehen, wenn folgende Kriterien erfüllt sind:
- Die Weglängendifferenz δD muss größer als - λ/20 sein, wobei A die Wellenlänge bei der nominellen Mittenfrequenz des betrachteten Oktavbands ist.
- Das sogenannte Rayleigh-Kriterium muss erfüllt sein, was der Fall ist, wenn δD größer als λ/4 - δ*D ist, wobei δ*D die Weglängendifferenz durch den PunktD in Bezug auf die an der quellseitigen MGL gebildete SpiegelquelleS* und den an der immissionsortseitigen MGL gebildeten SpiegelimmissionsortR* ist. Bei der Berechnung von δ*D werden nur die PunkteS*, D undR* verwendet und andere den Schallstrahl blockierende Hindernisse vernachlässigt.
Sind beide Kriterien erfüllt, wird die vom PunktD erzeugte Beugung berücksichtigt und die Bodenterme getrennt für den Quellbereich über der quellseitigen MGL und für den Bereich des Immissionsortes über der immissionsortseitigen MGL berechnet.
5.5.1.1.2 Freie Sichtverbindung ohne Beugung
Ist mindestens eines der Kriterien aus Abschnitt 5.5.1.1.1 nicht erfüllt, so wird keine Beugungsdämpfung im Ausbreitungsweg berücksichtigt und eine gemeinsame MGL für den gesamten Ausbreitungsweg berechnet.
5.5.1.2 Blockierte Sichtverbindung
Ist die Sichtverbindung zwischen Quelle und Immissionsort blockiert, fungieren ein oder mehrere Punkte des Hindernisprofils als Beugungspunkte. Der Schallstrahl besteht damit aus Abschnitten, die unter homogenen Ausbreitungsbedingungen Geradenabschnitte und unter günstigen Ausbreitungsbedingungen Kreissegmente gleichen Radius sind.
Der zu betrachtende gebeugte Ausbreitungsweg ist definiert als die kürzeste konvexe über alle Hindernisse hinweg verlaufende Verbindung von Quelle und Immissionsort in der vertikalen Ausbreitungsebene (Punkte des Hindernisprofils unterhalb der direkten Sichtverbindung kommen damit in diesem Fall grundsätzlich nicht als Beugungspunkte in Frage). Die Anforderung der Konvexität bedeutet, dass an jedem Beugungspunkt der abgehende Strahlabschnitt gegenüber dem ankommenden Strahlabschnitt nach unten abknickt.
Unter homogenen Ausbreitungsbedingungen kann der Ausbreitungsweg mittels eines Gummibands gefunden werden. Unter günstigen Ausbreitungsbedingungen kann ein analoges iteratives Suchverfahren gewählt werden, das die Konvexität des Ausbreitungswegs an allen Beugungspunkten gewährleistet.
Für den Quellbereich zwischen Quelle und erstem Beugungspunkt ist eine quellseitige MGL und für den Bereich des Immissionsortes zwischen letztem Beugungspunkt und Immissionsort eine immissionsortseitige MGL zu berechnen. Unter Verwendung der oben definierten Beugungspunkte werden die Weglängendifferenzen δ und δ* berechnet, wobei δ* die Weglängendifferenz durch die zur Bestimmung von δ verwendeten Beugungspunkte in Bezug auf die an der quellseitigen MGL gebildete SpiegelquelleS* und den an der immissionsortseitigen MGL gebildeten SpiegelimmissionsortR* ist - ohne Berücksichtigung anderer den Schallstrahl blockierender Hindernisse.
5.5.1.3 Seitliche Beugung
Seitliche Beugung wird nur im Ausnahmefall berücksichtigt, und zwar wenn alle der folgenden Bedingungen erfüllt sind:
- Bei der Quelle handelt es sich um eine explizit als Punktquelle beschriebene Industrie- und Gewerbelärmquelle.
- Bei der Quelle handelt es sich um eine Originalquelle, also nicht um eine durch Reflexion entstandene Spiegelquelle.
- Die Sichtverbindung zwischen Quelle und Immissionsort verläuft oberhalb des Bodenprofils.
- In der vertikalen Ausbreitungsebene liegt eine Weglängendifferenz δ > 0 vor, die Sichtverbindung wird also durch mindestens einen Punkt des Hindernisprofils blockiert. Daher gibt es Situationen, in denen unter homogenen Bedingungen seitliche Beugung berücksichtigt wird, unter günstigen Bedingungen jedoch nicht.
Sind alle diese Bedingungen erfüllt, werden neben dem Ausbreitungsweg, der über das die Sichtverbindung blockierende Hindernis, bzw. die die Sichtverbindung blockierenden Hindernisse hinweg gebeugt wird, bis zu zwei seitlich gebeugte Ausbreitungswege berücksichtigt. Dafür werden die Schnittflächen aller Hindernisse, die von der Sichtverbindung durchdrungen werden, mit der Ebene, die senkrecht auf der vertikalen Ausbreitungsebene steht und Quelle und Immissionsort enthält, der sogenannten lateralen Ausbreitungsebene, gebildet. In der lateralen Ausbreitungsebene definiert die kürzeste, konvexe, aus Geradenabschnitten bestehende Verbindung von Quelle und Immissionsort rechts bzw. links um die soeben gebildeten Schnittflächen herum die vertikalen Kanten, um die die seitlichen Ausbreitungswege gebeugt werden.
Zur Berechnung der Bodendämpfung auf einem seitlich gebeugten Ausbreitungsweg wird für das Hindernisprofil vertikal unter dem Ausbreitungsweg eine MGL zwischen Quelle und Immissionsort berechnet. Dies geschieht in einer vertikalen X-Z-Hilfsebene, deren Z-Koordinate der absoluten Höhe entspricht und deren X-Koordinate der Entfernung vom Quellpunkt entlang des Ausbreitungswegs in der Projektion auf eine horizontale Ebene entspricht. Schneidet ein seitlicher Ausbreitungsweg in der Projektion auf die Horizontale den Grundriss eines Gebäudes, wird dieses bei der Berechnung vonGpath (in der Regel mitG = 0) und bei der Berechnung der MGL mit seiner Höhe berücksichtigt. In dieser Hilfsebene wird der Ausbreitungsweg in Bezug auf die Berechnung der Bodendämpfung als Ausbreitungsweg mit freier Sichtverbindung ohne Beugung behandelt.
5.5.1.4 Reflexionen
Ausbreitungswege in der vertikalen Ausbreitungsebene können Reflexionen enthalten, die über Spiegelschallquellen abgebildet werden, wie in Abbildung 5.1 in der Projektion auf die horizontale Ebene dargestellt. Ein Hindernis wird nur dann als Reflektor berücksichtigt, wenn seine Neigung zur Vertikalen 15 Grad nicht überschreitet und es die Sichtverbindung zur Spiegelquelle blockiert. Als Reflexionspunkt wird der Punkt der reflektierenden Fläche definiert, an dem die - je nach Ausbreitungsbedingungen gerade oder kreisförmige - Sichtverbindung zur Spiegelquelle die als vertikal angenommene Ebene des Reflektors durchdringt. Das reflektierende Hindernis muss mindestens folgende Ausdehnung haben, um berücksichtigt zu werden: Die vertikal durch den Reflexionspunkt gemessene Höhe muss aus Sicht des einfallenden Strahls mindestens 0,5 m betragen. Und nach Projektion auf eine horizontale Fläche muss die horizontal durch den Reflexionspunkt gemessene Breite der reflektierenden Fläche aus Sicht des einfallenden Strahls ebenfalls mindestens 0,5 m betragen.
Abbildung 5.1: Mit dem Spiegelquellverfahren erfasste spiegelnde Reflexion an einem Hindernis (S: Quelle, S": Spiegelquelle, R: Immissionsort).
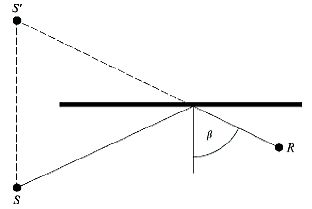
Bildet die Einfallsebene mit dem Lot auf die als vertikal betrachtete reflektierende Fläche einen Winkel von β, so bilden Einfalls- und Ausfallsebene am Reflektor einen Winkel von 2β. Einfalls- und Ausfallsebene werden dann um den Winkel 180° - 2β aufgefaltet und bilden so die gemeinsame vertikale Ausbreitungsebene.
In dieser gemeinsamen vertikalen Ausbreitungsebene werden der Parameterd zur Berechnung der Dämpfung aufgrund von Luftabsorption und zur Berechnung des Krümmungsradius unter günstigen Ausbreitungsbedingungen und der Abstand zur Berechnung der Dämpfung aufgrund geometrischer Divergenz bestimmt.
zur Berechnung der Dämpfung aufgrund geometrischer Divergenz bestimmt.
| Für die Lärmkartierung sind nur Ausbreitungswege mit maximal einer Reflexion zu berücksichtigen. |
5.5.2 Mittlere Grundlinie (MGL)
In der vertikalen Ausbreitungsebene bildet das Hindernisprofil eine Polylinie. Zur Berechnung der Bodendämpfung wird diese Polylinie durch eine Gerade ersetzt, die sogenannte Mittlere Grundlinie (MGL). Die äquivalente Höhe eines Punktes ist gleich seinem Abstand von der Mittleren Grundlinie. Weist die äquivalente Höhe eines Punktes einen negativen Wert auf, d. h. befindet sich der Punkt unterhalb der mittleren Grundlinie, wird die äquivalente Höhe zu null gesetzt.
Abbildung 5.2: Äquivalente Höhen über der Mittleren Grundlinie
1: Tatsächliches Relief
2: Mittlere Grundlinie
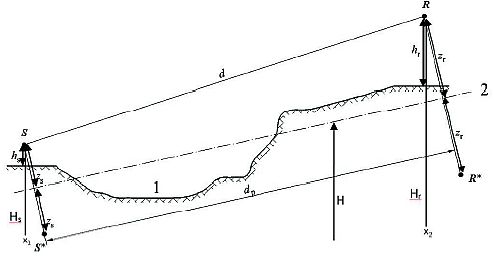
Abbildung 5.2 zeigt das Konzept der Mittleren Grundlinie für den Fall eines Ausbreitungswegs ohne Beugung, in dem nur eine MGL zwischen Quelle und Immissionsort berechnet wird. Für Ausbreitungswege mit Beugung werden zwei MGLn berechnet: Eine quellseitige zwischen Quelle und erstem Beugungspunkt sowie eine immissionsortseitige zwischen letztem Beugungspunkt und Immissionsort, wie in Abbildung 5.6 und Abbildung 5.7 dargestellt.
Zur Berechnung der Mittleren Grundlinie wird das Hindernisprofil, also die Kombination von Bodenprofil und allen vom Menschen errichteten Hindernissen wie z.B. Gebäuden und Dämmen, in der vertikalen Ausbreitungsebene als eine geordnete Menge von Punkten (xt, Ht) mit t {1;T} beschrieben.
Diese Punktmenge definiert eine Polylinie oder - äquivalent dazu - eine Abfolge gerader SegmenteH(x) = atx + bt mit x [xt; xt+1] undt {1;T - 1}. Die Parameterat undbt sind definiert als:
|
at = ((Ht+1 - Ht) / (xt+1 - xt)) , |
(5.12) |
|
bt = ((Htxt+1 - Ht+1xt) / (xt+1 - xt)) . |
(5.13) |
Die Mittlere Grundlinie wird durch die GeradeHMGL(x) = ax + b dargestellt, die an die Polylinie mittels Approximation nach der Methode der kleinsten Quadrate angepasst wird. Die Gleichung der Mittleren Grundlinie kann analytisch abgeleitet werden:
|
|
(5.14) |
|
|
(5.15) |


Substituiert man hierin die Gleichungen (5.12) und (5.13), so ergeben sich folgende vereinfachte Gleichungen, die Singularitäten beixt = xt+1 umgehen:
|
|
(5.16) |
|
|
(5.17) |

Die Koeffizienten der Mittleren Grundlinie sind wie folgt gegeben:
|
|
(5.18) |
|
|
(5.19) |
5.5.3 Beugung - Berechnung der Weglängendifferenzen δ H und δ F
Das Verfahren zur Berechnung der Beugung an dünnen und dicken Schallschirmen, Gebäuden, natürlichen und künstlichen Wällen sowie durch die Kanten von Böschungen, Geländeeinschnitten und Viadukten beruht auf der Kenntnis der Weglängendifferenz zwischen dem gebeugten Schallstrahl und dem fiktiven direkten Schallstrahl von der Quelle und zum Immissionsort.
Bei homogenen Ausbreitungsbedingungen wird mit geraden Schallstrahlen gerechnet.
Bei günstigen Ausbreitungsbedingungen wird mit gekrümmten Schallstrahlen gerechnet und angenommen, dass alle Abschnitte eines Ausbreitungswegs vom QuellpunktS zum ImmissionsortR denselben Radius haben:
|
|
(5.20) |
Dabei gilt:
| d | ist für Ausbreitungswege in der vertikalen Ausbreitungsebene die direkte 3D-Schrägentfernung zwischen Quelle und Immissionsort, alsod = . Für seitlich gebeugte Ausbreitungswege istd die Länge des gebeugten Ausbreitungswegs von der Quelle zum Immissionsort unter homogenen Ausbreitungsbedingungen, also . Für seitlich gebeugte Ausbreitungswege istd die Länge des gebeugten Ausbreitungswegs von der Quelle zum Immissionsort unter homogenen Ausbreitungsbedingungen, also
|

Die Länge des gekrümmten Schallstrahlbogens zwischen den Punkten M und N beträgt dann:
|
|
(5.21) |
5.5.3.1 Beugung bei blockierter Sichtverbindung
Ist die Sichtlinie zwischen Quelle und Immissionsort blockiert, werden unter homogenen Ausbreitungsbedingungen die zu berücksichtigenden Beugungspunkte in der vertikalen Ausbreitungsebene mittels Gummiband als kürzeste konvexe aus Geradenabschnitten bestehende Verbindung von Quelle und Immissionsort bestimmt, wie in Abbildung 5.3 dargestellt.
Abbildung 5.3: Anwendung des Gummibands in der Ausbreitungsebene zur Identifizierung zu berücksichtigender Beugungspunkte unter homogenen Ausbreitungsbedingungen. Die rechte Kante des Hindernisses E2 und das Hindernis E3 berühren das Gummiband nicht und bleiben deshalb unberücksichtigt.
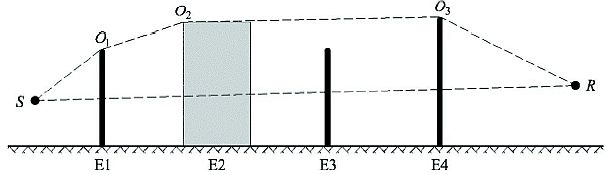
Unter günstigen Ausbreitungsbedingungen ergeben sich die zu berücksichtigenden Beugungspunkte durch Konstruktion der kürzesten konvexen aus Kreisabschnitten bestehenden Verbindung zwischen Quelle und Immissionsort in der vertikalen Ausbreitungsebene, wie in Abbildung 5.4 dargestellt.
Abbildung 5.4: Konstruktion der zu berücksichtigenden Beugungspunkte unter günstigen Ausbreitungsbedingungen mittels Kreisabschnitten. Die Hindernisse E2 und E3 liegen unterhalb des Ausbreitungswegs und bleiben deshalb unberücksichtigt.
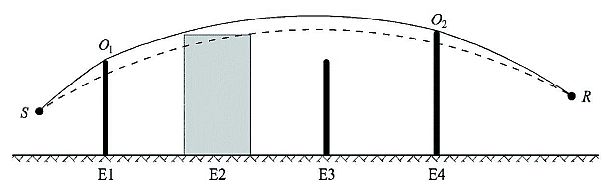
Die Weglängendifferenzen δH und δF sind als Differenz zwischen der Länge des gebeugten Strahls und der Länge des direkten Strahls definiert und werden folgendermaßen berechnet:
|
|
(5.22) |
|
|
(5.23) |
|
|
(5.24) |
|
|
(5.25) |


Dabei istn die Anzahl der zu berücksichtigenden Beugungspunkte im Ausbreitungsweg; im Beispiel aus Abbildung 5.3 gilt alson = 3. Im Fall nur eines Beugungspunktes giltn = 1, womit die Summen in den Gleichungen (5.22) und (5.24) gleich null sind.
Die Berechnung der Weglängendifferenz funktioniert gleichermaßen in der vertikalen wie in der lateralen Ausbreitungsebene.
5.5.3.2 Beugung bei freier Sichtverbindung
Bei freier Sichtverbindung zwischen Quelle und Immissionsort wird maximal ein Beugungspunkt berücksichtigt, wie in Abbildung 5.5 schematisch dargestellt.
Abbildung 5.5: Berechnung der Weglängendifferenzen bei freier Sichtverbindung unter günstigen Ausbreitungsbedingungen (links und Mitte) und homogenen Ausbreitungsbedingungen (rechts)
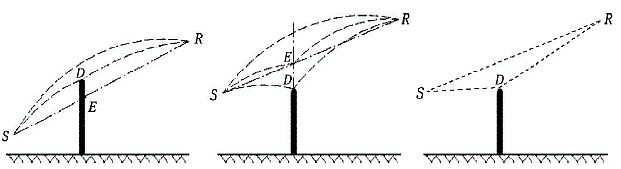
Die Weglängendifferenzen δH und δF werden in diesem Fall folgendermaßen berechnet:
|
|
(5.26) |
|
|
(5.27) |


Dabei ist der PunktE als der Schnittpunkt der vertikalen Geraden durch den BeugungspunktesD mit der geraden Verbindungslinie zwischenS undR definiert.
5.5.4 Bodendämpfung bei gebeugten Ausbreitungswegen in der vertikalen Ausbreitungsebene
Zur Berechnung der Bodendämpfung bei gebeugten Ausbreitungswegen in der vertikalen Ausbreitungsebene werden, wie in Abbildung 5.6 für homogene Ausbreitungsbedingungen und in Abbildung 5.7 für günstige Ausbreitungsbedingungen dargestellt, zwei zusätzliche Punkte konstruiert:
- Der SpiegelquellpunktS* wird durch Spiegelung des QuellpunktesS an der quellseitigen MGL zwischen Quelle und erstem BeugungspunktO1 gebildet,
- der SpiegelimmissionsortR* wird analog durch Spiegelung des ImmissionsortesR an der immissionsortseitigen MGL zwischen letztem BeugungspunktOn und Immissionsort gebildet.
Mit Hilfe dieser Punkte können die Weglängendifferenzen δH und δF für die drei zu betrachtenden gebeugten Ausbreitungswege (S,R), (S*,R) und (S,R*) berechnet werden, wobei auch für die beiden letztgenannten Ausbreitungswege ausschließlich die Beugungspunkte berücksichtigt werden, die beim erstgenannten Ausbreitungsweg betrachtet wurden, und andere den Schallstrahl blockierende Hindernisse vernachlässigt werden.
Abbildung 5.6: Bildung des SpiegelquellpunktesS* und des SpiegelimmissionsortesR* unter homogenen Ausbreitungsbedingungen.
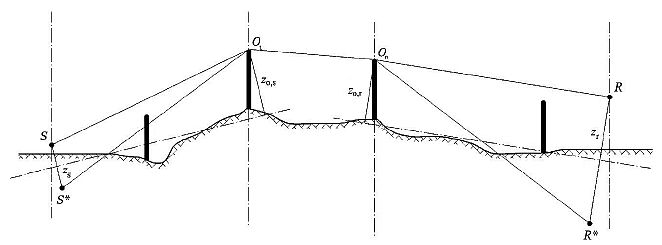
Abbildung 5.7: Bildung des SpiegelquellpunktesS* und des SpiegelimmissionsortesR* unter günstigen Ausbreitungsbedingungen.
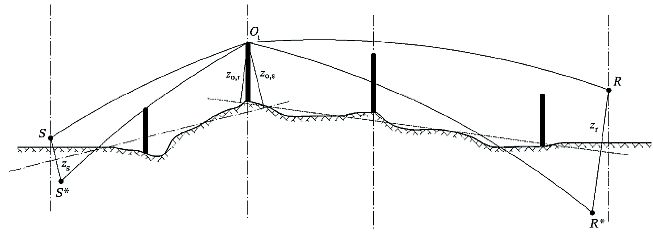
5.5.5 Bodendämpfung - gemittelter Bodenparameter
Die akustischen Absorptionseigenschaften des Bodens unterhalb des Ausbreitungswegs haben wesentlichen Einfluss auf die Bodendämpfung. Dabei spielt vor allem die Porosität des Bodens eine Rolle: Ein dichter Boden ist im Allgemeinen reflektierend, ein poröser Boden absorbierend.
Für die Berechnung der Bodendämpfung wird die akustische Absorption des Bodens durch den dimensionslosen KoeffizientenG ausgedrückt, der Werte von 0 für vollständig reflektierenden Boden bis 1 für komplett absorbierenden Boden annehmen kann.G ist unabhängig von der Frequenz. Tabelle 5.3 enthält beispielhaft für ausgewählte Bodenarten typische G-Werte.
Tabelle 5.3: Typische G-Werte für ausgewählte Bodenarten
| Beschreibung des Bodens |
G-Wert |
| Sehr weicher Boden bis normaler nicht verdichteter Boden (z.B. Schnee, Waldboden, Weideland) |
1,0 |
| Verdichtetes Feld und Schotter (z.B. verdichteter Rasen, Grünanlage) |
0,7 |
| Verdichteter dichter Boden (z.B. Schotterstraße, Parkplatz) |
0,3 |
| Harte und sehr harte Oberflächen (z.B. dichter Asphalt, Beton, Wasser) |
0,0 |
Die Berechnung der BodendämpfungAground erfolgt immer in Bezug auf eine Mittlere Grundlinie. Zur Berechnung des mittleren G-Werts,Gpath, für den Ausbreitungsweg, bzw. den durch die MGL abgebildeten Teil des Ausbreitungswegs, werden die G-Werte des Hindernisprofils vertikal unter dem Ausbreitungsweg, bzw. dem betrachteten Teil des Ausbreitungswegs, arithmetisch gemittelt:
|
|
(5.28) |
Dabei gilt (siehe auch Abbildung 5.2):
| x1 | ist die x-Koordinate des "linken" Begrenzungspunktes der MGL, also entweder der Quelle oder des letzten Beugungspunktes. |
| xr | ist die x-Koordinate des "rechten" Begrenzungspunktes der MGL, also entweder des ersten Beugungspunktes oder des Immissionsortes. |
| G(x) | ist derG-Wert entlang des Hindernisprofils in der vertikalen Ausbreitungsebene. |
| Für die Lärmkartierung istGpath = 0,3 zu verwenden. |
Wenn Quelle und Immissionsort, bzw. Quelle und erster Beugungspunkt, nahe beieinander liegen, so dass ihr Abstand in der Projektion auf die MGL, genanntdp (siehe Abbildung 5.2), kleiner oder gleich dem 30-Fachen der Summe der äquivalenten Höhen der Begrenzungspunkte der MGL ist, so ist die Bodenart nahe der Quelle dominant. Um dem Rechnung zu tragen, wird in diesem Fall der BodenfaktorGpath wie folgt korrigiert:
|
|
(5.29) |

Dabei gilt (siehe auch Abbildung 5.2):
| Gs | ist derG-Wert des Bodens unter der Quelle. |
| dp | ist die Länge des auf die MGL projizierten Abstands der Begrenzungspunkte der MGL. |
| zs | ist die äquivalente Höhe des Quellpunktes. |
| zr | ist die äquivalente Höhe des "rechten" Begrenzungspunktes der MGL. Für gebeugte Ausbreitungswege in der vertikalen Ausbreitungsebene giltzr =zo1, für alle anderen Ausbreitungswege giltzr =zR. |
Für Quellen des Straßenverkehrs giltGs = 0; die Absorption poröser Straßendecken ist bereits im Emissionsmodell der Straße berücksichtigt. Für Quellen des Schienenverkehrs gilt für Bahnstrecken mit Fester FahrbahnGs = 0 und für Bahnstrecken mit Gleisen auf Schotterbettung und Bahnstrecken mit anderen absorbierenden OberbauartenGs = 1. Für industrielle und gewerbliche Quellen und Anlagen gibt es keine pauschale Antwort undGs ist im Einzelfall zu ermitteln.
5.5.6 Dämpfung durch Retrobeugung
Bei der Reflexion an einem Hindernis (Lärmschutzwand, Gebäude) bestimmt die Position des Auftreffens des Strahls in Bezug auf die Oberkante des Hindernisses den Anteil an Energie, der tatsächlich reflektiert wird. Dieser Verlust an akustischer Energie bei der Reflexion durch die Nähe des Reflexionspunktes zur Oberkante des Reflektors wird als Dämpfung durch Retrobeugung bezeichnet.
Abbildung 5.8: Konstruktion des fiktiven gebeugten Ausbreitungswegs mit der Oberkante des Reflektors als Beugungspunkt unter homogenen Ausbreitungsbedingungen

Abbildung 5.8 zeigt das der Retrobeugung zugrundeliegende Konstruktionsprinzip am Beispiel eines Ausbreitungswegs mit einem Reflektor und einem Beugungspunkt unter homogenen Ausbreitungsbedingungen. Im linken Teil der Abbildung ist der Ausbreitungsweg vom QuellpunktS zum Reflektor und von dort zum Beugungspunkt0 und schließlich zum ImmissionsortR dargestellt. Im mittleren Teil der Abbildung wurde der am Reflektor gebildete SpiegelquellpunktS" eingefügt und im rechten Teil der Abbildung ein fiktiver Ausbreitungsweg mit der Oberkante des Reflektors als zusätzlichem BeugungspunktP hinzugefügt.
Die Dämpfung durch Retrobeugung wird als Beugungsdämpfung berechnet, und zwar basierend auf der Weglängendifferenz δR, die als Differenz des Länge des Ausbreitungswegs ohne den fiktiven Beugungspunkt P an der Oberkante des Reflektors und des Ausbreitungswegs mit diesem Punkt definiert ist. Die Weglängendifferenz δR ist daher immer kleiner oder gleich null.
Im Beispiel aus Abbildung 5.8 ergibt sich δR = -
- -
- .
.
Abbildung 5.9: Konstruktion des fiktiven gebeugten Ausbreitungswegs mit der Oberkante des Reflektors als Beugungspunkt unter günstigen Ausbreitungsbedingungen

Abbildung 5.9 zeigt das Konstruktionsprinzip unter günstigen Ausbreitungsbedingungen.
Im linken Teil der Abbildung ist wieder der Ausbreitungsweg vom QuellpunktS zum Reflektor und von dort zum BeugungspunktO und schließlich zum ImmissionsortR dargestellt, allerdings aus Kreisabschnitten gebildet.
Im mittleren Teil der Abbildung wurde der am Reflektor gebildete SpiegelquellpunktS" eingefügt und im rechten Teil der Abbildung ein fiktiver Ausbreitungsweg mit der Oberkante des Reflektors als zusätzlichem BeugungspunktP hinzugefügt. Der PunktO liegt in diesem Beispiel unterhalb des fiktiven Ausbreitungswegs, weshalb sich ergibt.
ergibt.
5.6 Modell der Schallausbreitung
5.6.1 Dämpfung aufgrund geometrischer Divergenz
Die Dämpfung aufgrund geometrischer DivergenzAdiv, entspricht einer Verringerung des Schallpegels mit zunehmender Ausbreitungsentfernung. Sie ist durch folgende Gleichung gegeben:
|
Adiv = 20 · lg( |
(5.30) |
5.6.2 Dämpfung aufgrund von Luftabsorption
Die Dämpfung aufgrund von LuftabsorptionAatm, während der Ausbreitung von der Quelle zum Immissionsort ist durch folgende Gleichung gegeben:
|
Aatm = aatm · (d / 1.000) . |
(5.31) |
Dabei gilt:
| aatm | ist der Koeffizient der Dämpfung von Luft in dB/km gemäß ISO 9613-1:1993-06. |
| Für die Lärmkartierung sind die Koeffizientenaatm für eine Temperatur von 10 °C, eine relative Luftfeuchtigkeit von 70 % und einen Luftdruck von 1013,25 hPa zu verwenden. |
5.6.3 Bodendämpfung
Die Berechnung der BodendämpfungAground erfolgt immer in Bezug auf eine Mittlere Grundlinie. Je nach Art des Ausbreitungswegs werden MGLn für drei verschiedene Bereiche gebildet:
- Für den gesamten Ausbreitungsweg (S,R),
- für den Quellbereich bis zum ersten Beugungspunkt (5,0) und
- für den Bereich des Immissionsortes hinter dem letzten Beugungspunkt (0,R).
Eigentlich müssten die BeugungspunkteO in der Beschreibung der für die Bildung der MGLn verwendeten Bereiche die Indizes 1, bzw.n tragen. Da keine Verwechselungsgefahr besteht, entfallen diese Indizes im Interesse der Lesbarkeit der Gleichungen.
Abhängig vom betrachteten Bereich und von den Ausbreitungsbedingungen wird bei der Berechnung der Bodendämpfung entwederGpath oderG"path verwendet. In den folgenden Gleichungen werden die generischen BezeichnungenGw undGm benutzt, deren Bedeutung vom Anwendungsfall abhängt, wie in Tabelle 5.4 definiert.
Unter Verwendung dieser generischen Bezeichnungen gelten die Gleichungen in diesem Abschnitt für alle drei Anwendungsbereiche (S,R), (S,O) und (O,R), weshalb auf diesen Index im Interesse der Lesbarkeit der Gleichungen verzichtet wird.
Tabelle 5.4: Definition der generischen BezeichnungenGw undGm
| Ausbreitungsbedingungen | ||
| homogen | günstig | |
| gesamter Ausbreitungsweg oder Quellbereich (S,R) oder (S,O) | Gw = Gm = G"path | Gw = Gpath Gm = G"path |
| Bereich des Immissionsortes (O,R) | Gw = Gm = Gpath | |
Zunächst wird der allgemeine Fall betrachtet, dassGpath > 0.
Die Bodendämpfung bei homogenen Ausbreitungsbedingungen wird nach folgender Gleichung berechnet:
|
|
(5.32) |

Dabei gilt:
| k | ist definiert alsk = (2πfm) / c , wobeifm die nominelle Mittenfrequenz des betrachteten Oktavbands in Hz ist undc die Geschwindigkeit des Schalls in Luft, angenommen als 340 m/s . | |
| z1 | ist die äquivalente Höhe des "linken" Begrenzungspunktes der MGL. | |
| Cf | ist folgendermaßen definiert: | |
|
| (5.33) | |
| Dabei ist w folgendermaßen definiert: | ||
|
| (5.34) | |
| Die Untergrenze fürAground,H ist folgendermaßen definiert: | ||
|
Aground,H,min = -3(1 - Gm) . | (5.35) | |

Diese Untergrenze trägt dem Umstand Rechnung, dass bei einem großen Abstand zwischen Quelle und Immissionsort die erste quellenseitige Reflexion nicht mehr auf der quellnahen Oberfläche, sondern auf natürlichem Gelände erfolgt.
Zur Berechnung der Bodendämpfung bei günstigen Bedingungen werden die modifizierten äquivalenten Höhen und eingeführt, die der Krümmung der Schallstrahlung und atmosphärischer Turbulenz Rechnung tragen und folgendermaßen definiert sind:
|
|
(5.36) |
|
|
(5.37) |


Diese modifizierten äquivalenten Höhen werden anstelle der äquivalenten Höhen zur Berechnung der BodendämpfungAground,F verwendet:
 |
(5.38) |
Die Untergrenze fürAground,F ist folgendermaßen definiert:
|
|
(5.39) |
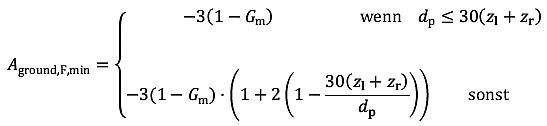
Im seltenen Fall, dass unter günstigen Ausbreitungsbedingungenzl =zr = 0 , können die Gleichungen (5.36), (5.37) und (5.38) nicht angewendet werden, und es gilt pauschal
Aground,F = Aground,F,min .
Für den speziellen Fall, dassGpath = 0 , gilt:
|
Aground,H = -3 , |
(5.40) |
|
Aground,F = Aground,F,min . |
(5.41) |
5.6.4 Dämpfung aufgrund von Beugung
Die Berechnung der Dämpfung aufgrund von Beugung beruht auf der durch das Hindernis verursachten Weglängendifferenz gegenüber der ungehinderten Schallausbreitung. Der Einfluss der Ausbreitungsbedingungen auf die Beugungsdämpfung Δdif wird ausschließlich bei der Berechnung der Weglängendifferenzen berücksichtigt. Die folgenden Gleichungen zur Berechnung von Δdif gelten gleichermaßen für homogene und günstige Ausbreitungsbedingungen:
|
|
(5.42) |
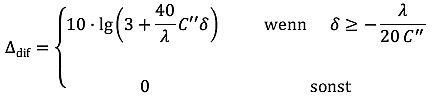
Dabei gilt:
| λ | ist die Wellenlänge bei der nominellen Mittenfrequenz des betrachteten Oktavbands. | ||
| δ | ist die Weglängendifferenz, also entweder δH oder δF (siehe Abschnitt 5.5.3). | ||
| C'" | ist ein Koeffizient zur Berücksichtigung von Mehrfachbeugung, der folgendermaßen definiert ist: | ||
|
|
(5.43) | ||
| Dabei gilt: | |||
| e | ist die Länge des Teilabschnitts eines gebeugten Ausbreitungswegs zwischen erstem und letztem Beugungspunkt, also entwedereH odereF. | ||
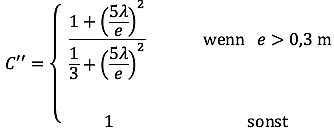
Die TermeAdif,H undAdif,F beschreiben die Dämpfung durch Beugung inklusive Bodendämpfung für gebeugte Ausbreitungswege in der vertikalen Ausbreitungsebene und sind folgendermaßen definiert:
| Adif, H = min(Δdif,H,(S,R); 25) + Δground,H,(S,O) + Δground,H,(O,R) , |
(5.44) |
| Adif,F = min(Δdif,F,(S,R); 25) + Δground,F,(S,O) + Δground,F,(O,R) . |
(5.45) |
Dabei gilt:
| Δdif,H,(S,R) | ist die Dämpfung aufgrund der Beugung zwischen der QuelleS und dem ImmissionsortR bei homogenen Ausbreitungsbedingungen. |
| Δground,H,(S,O) | ist die Bodendämpfung im Quellbereich, bewertet mittels der Beugung im Quellbereich bei homogenen Ausbreitungsbedingungen. |
| Δground,H,(O,R) | ist die Bodendämpfung im Bereich des Immissionsortes, bewertet mittels der Beugung im Bereich des Immissionsortes bei homogenen Ausbreitungsbedingungen. |
| Δdif,F,(S,R) | ist die Dämpfung aufgrund der Beugung zwischen der QuelleS und dem ImmissionsortR bei günstigen Ausbreitungsbedingungen. |
| Δground,F,(S,O) | ist die Bodendämpfung im Quellbereich, bewertet mittels der Beugung im Quellbereich bei günstigen Ausbreitungsbedingungen. |
| Δground,F,(O,R) | ist die Bodendämpfung im Bereich des Immissionsortes, bewertet mittels der Beugung im Bereich des Immissionsortes bei günstigen Ausbreitungsbedingungen. |
Liegen der Quellpunkt und der erste Beugungspunkt oberhalb der quellseitigen MGL, so sind die bewerteten Bodendämpfungsterme für den Quellbereich folgendermaßen definiert:
|
|
(5.46) |
|
|
(5.47) |
| Ansonsten gilt: | |
|
Δground,H,(S,O) =Aground,H,(S,O) , |
(5.48) |
|
Δground,F,(S,O) =Aground,F,(S,O) . |
(5.49) |


Liegen der letzte Beugungspunkt und der Immissionsort oberhalb der immissionsortseitigen MGL, so sind die bewerteten Bodendämpfungsterme für den Bereich des Immissionsortes folgendermaßen definiert:
|
|
(5.50) |
|
|
(5.51) |
| Ansonsten gilt: | |
|
Δground,H,(O,R) =Aground,H,(O,R) , |
(5.52) |
|
Δground,F,(O,R) =Aground,F,(O,R) . |
(5.53) |


5.6.5 Dämpfung aufgrund von Reflexionen
Beim Auftreffen auf einen Reflektor wird ein Teil der einfallenden Schallenergie vom Reflektor absorbiert. Zusammen mit der Dämpfung durch Retrobeugung führt dies dazu, dass der Schallleistungspegel der Spiegelschallquelle kleiner als der der Originalschallquelle ist:
|
LW,S", =LW,S + 10 · lg(1 -ar) Δretrodif . |
(5.54) |
Dabei gilt:
| LW,S" | ist der Schallleistungspegel der SpiegelschallquelleS". |
| LW,S | ist der Schallleistungspegel der OriginalschallquelleS. |
| ar | ist der Absorptionskoeffizient der Oberfläche des Reflektors gemäß Definition in DIN EN 1793-1:2013-04. |
Die Dämpfung durch Retrobeugung Δretrodif ist dabei definiert als:
|
|
(5.55) |
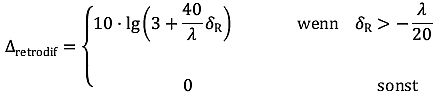
Dabei gilt:
| λ | ist die Wellenlänge bei der nominellen Mittenfrequenz des betrachteten Oktavbands. |
| δR | ist die Weglängendifferenz der Retrobeugung, wie in Abschnitt 5.5.6 definiert. |
_____
1) Klassen M und N bis 30. August 2020 gemäß "Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates vom 5. September 2007 (ABl. L 263 vom 09.10.2007 S. 1) zur Schaffung eines Rahmens für die Genehmigung von Kraftfahrzeugen und Kraftfahrzeuganhängern sowie von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge" beziehungsweise ab 1. September 2020 gemäß "Verordnung (EU) 2018/858 des Europäischen Parlaments und des Rates vom 30. Mai 2018 über die Genehmigung und die Marktüberwachung von Kraftfahrzeugen und Kraftfahrzeuganhängern sowie von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge zur Änderung der Verordnungen (EG) Nr. 715/2007 und (EG) Nr. 595/2009 und zur Aufhebung der Richtlinie 2007/46/EG "; Klasse L gemäß "Verordnung (EU) Nr. 168/2013 des Europäischen Parlaments und des Rates vom 15. Januar 2013 über die Genehmigung und Marktüberwachung von zwei- oder dreirädrigen und vierrädrigen Fahrzeugen".
2) SUV (Sports Utility Vehicles) Geländewagen
3) MPV (Multi-Purpose Vehicles) Mehrzweckfahrzeuge
4) DIN EN ISO 3095:2014-07, Akustik - Bahnanwendungen - Messung der Geräuschemission von spurgebundenen Fahrzeugen (ISO 3095:2013); Deutsche Fassung EN ISO 3095:2013
 | ENDE | |
...
X
⍂
↑
↓