

umwelt-online: Archivdatei - BinSchUO 2008 - Binnenschiffsuntersuchungsordnung - Anhang II
| zurück | |
| (aufgehoben) | Anlage K 11 |
| Schema der einheitlichen europäischen Schiffsnummer (ENI) | Anlage L |
| A | A | A | x | x | x | x | x |
| Code der zuständigen Behörde, die die europäische Schiffsnummer erteilt | [Fortlaufende Nummer] | ||||||
Bei diesem Schema steht "tA" für den von der zuständigen Behörde, die die europäische Schiffsnummer erteilt, vergebenen dreistelligen Code gemäß den folgenden Zahlenbereichen:
| 001-019 | Frankreich |
| 020-039 | Niederlande |
| 040-059 | Deutschland |
| 060-069 | Belgien |
| 070-079 | Schweiz |
| 080-099 | reserviert für Fahrzeuge aus Ländern, die keine Vertragsparteien der Mannheimer Akte sind, und für die vor dem 1. April 2007 ein Rheinschiffsattest ausgestellt worden ist |
| 100-119 | Norwegen |
| 120-139 | Dänemark |
| 140-159 | Vereinigtes Königreich |
| 160-169 | Island |
| 170-179 | Irland |
| 180-189 | Portugal |
| 190-199 | reserviert |
| 200-219 | Luxemburg |
| 220-239 | Finnland |
| 240-259 | Polen |
| 260-269 | Estland |
| 270-279 | Litauen |
| 280-289 | Lettland |
| 290-299 | reserviert |
| 300-309 | Österreich |
| 310-319 | Liechtenstein |
| 320-329 | Tschechische Republik |
| 330-339 | Slowakei |
| 340-349 | reserviert |
| 350-359 | Kroatien |
| 360-369 | Serbien |
| 370-379 | Bosnien und Herzegowina |
| 380-399 | Ungarn |
| 400-419 | Russische Föderation |
| 420-439 | Ukraine |
| 440-449 | Weißrussland |
| 450-459 | Republik Moldau |
| 460-469 | Rumänien |
| 470-479 | Bulgarien |
| 480-489 | Georgien |
| 490-499 | reserviert |
| 500-519 | Türkei |
| 520-539 | Griechenland |
| 540-549 | Zypern |
| 550-559 | Albanien |
| 560-569 | Die ehemalige Jugoslawische Republik Mazedonien |
| 570-579 | Slowenien |
| 580-589 | Montenegro |
| 590-599 | reserviert |
| 600-619 | Italien |
| 620-639 | Spanien |
| 640-649 | Andorra |
| 650-659 | Malta |
| 660-669 | Monaco |
| 670-679 | San Marino |
| 680-699 | reserviert |
| 700-719 | Schweden |
| 720-739 | Kanada |
| 740-759 | Vereinigte Staaten von Amerika |
| 760-769 | Israel |
| 770-799 | reserviert |
| 800-809 | Aserbaidschan |
| 810-819 | Kasachstan |
| 820-829 | Kirgisistan |
| 830-839 | Tadschikistan |
| 840-849 | Turkmenistan |
| 850-859 | Usbekistan |
| 860-869 | Iran |
| 870-999 | reserviert |
"xxxxx" steht für die von der zuständigen Behörde erteilte fünfstellige Seriennummer
| Navigationsradaranlagen und Wendeanzeiger in der Rheinschifffahrt | Anlage M 12a |
Teil I 17
Mindestanforderungen und Prüfbedingungen für Navigationsradaranlagen in der Rheinschifffahrt
§ 1 Anwendungsbereich
Diese Vorschriften legen die Mindestanforderungen an Navigationsradaranlagen in der Rheinschifffahrt fest sowie die Bedingungen, unter denen die Erfüllung der Mindestanforderungen geprüft wird. Inland-ECDIS-Geräte, die im Navigationsmodus betrieben werden können, sind Navigationsradaranlagen im Sinne dieser Vorschriften.
§ 2 Aufgabe der Radaranlage
Radaranlagen müssen ein für die Führung des Schiffes verwertbares Bild über seine Position in Bezug auf die Betonnung, die Uferkonturen und die für die Schifffahrt wesentlichen Bauwerke geben sowie andere Schiffe und über die Wasseroberfläche hinausragende Hindernisse im Fahrwasser sicher und rechtzeitig erkennen lassen.
1. Radaranlagen müssen den Anforderungen des Gesetzes über Funkanlagen und Telekommunikationsendeinrichtungen vom 7. Februar 2001 (BGBl. I S. 170), das zuletzt durch Artikel 1 des Gesetzes vom 3. Mai 2012 (BGBl. I S. 1717) geändert worden ist, entsprechen.
2. Darüber hinaus müssen die Radaranlagen den Anforderungen der Europäischen Norm DIN EN 302194-1:2007 genügen.
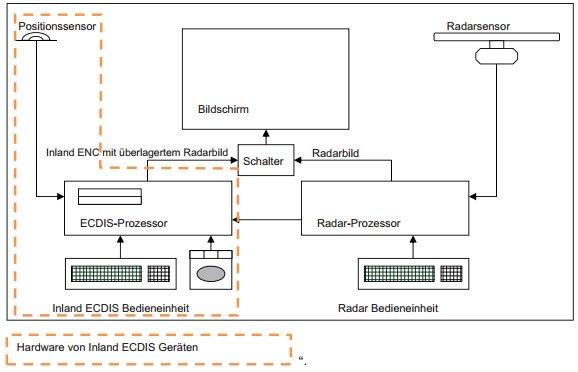
3. Nummer 2 gilt nicht für die Hardware von Inland-ECDIS-Geräten, die im Navigationsmodus in der Systemkonfiguration 2 oder 3 nach dem Standard Inland-ECDIS-Edition 2.3 Abschnitt 1 Punkt 5.2 in Verbindung mit Abschnitt 4 Punkt 2.2.2 oder 2.2.3 betrieben werden, wenn eine Konformitätsbescheinigung des Herstellers vorgelegt wird. Diese Konformitätsbescheinigung muss bestätigen, dass die Hardware
Ausgenommen von Satz 1 sind Bildschirmgeräte, die im Navigationsmodus in der Systemkonfiguration 3 betrieben werden, sowie Hardwarekomponenten, die der Bereitstellung der Radarinformationen vom Radar-Prozessor für die Darstellung auf dem Bildschirm des Inland-ECDIS-Gerätes dienen.
§ 4 Typprüfung
Radaranlagen sind zum Einbau an Bord von Schiffen nur dann zugelassen, wenn anhand einer Typprüfung nachgewiesen wurde, dass sie die Mindestanforderungen des § 3 Nummer 2 erfüllen. Prüfungen zum Nachweis der Erfüllung der Mindestanforderungen des § 3 Nummer 1 sind nicht Bestandteil der Typprüfung.
§ 5 Antrag auf Typprüfung
1. Der Antrag auf Typprüfung einer Radaranlage ist bei einer zuständigen Prüfbehörde eines Rheinuferstaates oder Belgiens zu stellen.
2. Mit dem Antrag sind folgende Unterlagen einzureichen:
3. Im Rahmen der Typprüfung ist Antragsteller eine juristische oder natürliche Person, unter deren Namen, Handelsmarke oder sonstiger charakteristischer Bezeichnung die zur Typprüfung angemeldete Anlage hergestellt oder gewerblich vertrieben wird.
§ 6 Typgenehmigung
Nach einer erfolgreichen Typprüfung wird die Typgenehmigung durch die Prüfbehörde durch das Ausstellen einer Bescheinigung über die Typgenehmigung erteilt. Bei Nichterfüllung der Mindestanforderungen werden dem Antragsteller die Ablehnungsgründe schriftlich mitgeteilt. Die zuständige Behörde teilt die von ihr zugelassenen Geräte der Zentralkommission für die Rheinschifffahrt mit.
§ 7 Kennzeichnung der Geräte, Zulassungsnummer
1. Die einzelnen Geräte der Anlage sind auf dauerhafte Art und Weise mit dem Namen des Herstellers, der Bezeichnung der Anlage, dem Typ des Gerätes und der Seriennummer zu versehen.
2. Die von der zuständigen Behörde erteilte Genehmigungsnummer ist dauerhaft am Sichtgerät der Anlage anzubringen, sodass sie auch nach dem Einbau deutlich sichtbar ist. Die Zulassungsnummer setzt sich wie folgt zusammen:
R-N-NNN
(R = Rhein
N = Nummer des Landes der Zulassung,
wobei 1 =D, 2 = F, 4 = N, 6 = B, 14 = CH
NNN = dreistellige Nummer, die von der zuständigen Behörde festzulegen ist.)
3. Die Genehmigungsnummer darf nur im Zusammenhang mit der zugehörigen Genehmigung verwendet werden. Für die Anfertigung und das Anbringen der Genehmigungsnummer hat der Antragsteller zu sorgen.
4. Die zuständige Behörde teilt der Zentralkommission für die Rheinschifffahrt die erteilte Genehmigungsnummer sowie die Bezeichnung des Typs, den Namen des Hersteller, den Namen des Inhabers der Typgenehmigung und den Tag der Zulassung umgehend mit.
§ 8 Erklärung des Herstellers
Zu jeder Anlage muss eine Erklärung des Herstellers mitgeliefert werden, in der zugesichert ist, dass die Anlage die bestehenden Mindestanforderungen erfüllt und ohne Einschränkungen dem bei der Prüfung vorgestellten Typ baugleich ist.
§ 9 Änderungen an genehmigten Anlage
1. Änderungen an genehmigten Anlagen führen zum Erlöschen der Genehmigung. Soweit Änderungen beabsichtigt sind, sind diese der Prüfbehörde schriftlich mitzuteilen.
2. Die Prüfbehörde entscheidet, ob die Genehmigung weiterhin bestehen bleibt oder ob eine Nachprüfung oder eine erneute Typprüfung notwendig ist. Im Falle einer erneuten Typprüfung wird eine neue Genehmigungsnummer erteilt.
| Anhang 17 |
Bild 1: Inland ECDIS Gerät, autarkes Gerät mit Verbindung zur Radaranlage (Systemkonfiguration 2)
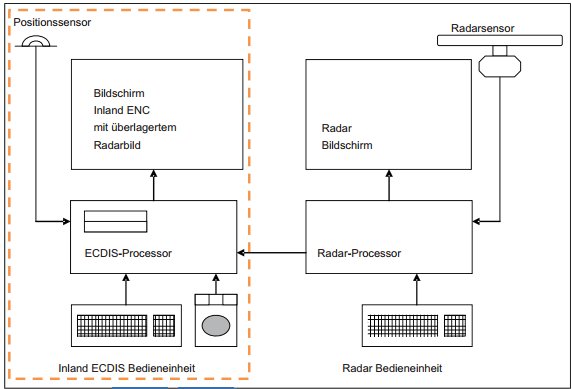
Bild 2: Inland ECDIS Gerät, autarkes Gerät mit Verbindung zur Radaranlage und gemeinsamem Monitor (Systemkonfiguration 3)
Teil II
Mindestanforderungen und Prüfbedingungen für Wendeanzeiger in der Rheinschifffahrt
Kapitel 1
Allgemeines
§ 1.01 Anwendungsbereich
Diese Vorschriften legen die Mindestanforderungen an Geräte zur Anzeige der Wendegeschwindigkeit (Wendeanzeiger) in der Rheinschifffahrt fest sowie die Bedingungen, unter denen die Erfüllung der Mindestanforderungen geprüft wird.
§ 1.02 Aufgabe des Wendeanzeigers
Die Wendeanzeiger haben die Aufgabe, zur Unterstützung der Radarnavigation die Wendegeschwindigkeit des Schiffes nach Backbord und Steuerbord zu messen und anzuzeigen.
§ 1.03 Typprüfung
Wendeanzeiger sind zum Einbau an Bord von Schiffen nur dann zugelassen, wenn anhand einer Typprüfung nachgewiesen wurde, dass sie die in diesen Vorschriften festgelegten Mindestanforderungen erfüllen.
§ 1.04 Antrag auf Typprüfung
1. Der Antrag auf Typprüfung eines Wendeanzeigers ist bei einer zuständigen Prüfbehörde eines Rheinuferstaates oder Belgiens zu stellen.
2. Mit dem Antrag sind folgende Unterlagen einzureichen:
3. Der Antragsteller ist verpflichtet, selbst zu prüfen oder prüfen zu lassen, dass die in diesen Vorschriften aufgestellten Mindestanforderungen erfüllt sind. Der Ergebnisbericht dieser Prüfung und die Messprotokolle sind dem Antrag beizufügen. Diese Unterlagen und die bei der Typprüfung ermittelten Daten werden bei der Prüfbehörde aufbewahrt.
4. Im Rahmen der Typprüfung ist Antragsteller eine juristische oder natürliche Person, unter deren Namen, Handelsmarke oder sonstiger charakteristischer Bezeichnung die zur Typprüfung angemeldete Anlage hergestellt oder gewerblich vertrieben wird.
§ 1.05 Typgenehmigung
Nach einer erfolgreichen Typprüfung stellt die Prüfbehörde eine Bescheinigung über die Typgenehmigung aus. Bei Nichterfüllung der Mindestanforderungen werden dem Antragsteller die Ablehnungsgründe schriftlich mitgeteilt. Die Typgenehmigung wird von der zuständigen Behörde erteilt. Die zuständige Behörde teilt die von ihr zugelassenen Geräte der Zentralkommission für die Rheinschifffahrt mit.
§ 1.06 Kennzeichnung der Geräte, Genehmigungsnummer
1. Die einzelnen Geräte der Anlage sind auf dauerhafte Art und Weise mit dem Namen des Herstellers, der Bezeichnung der Anlage, dem Typ des Gerätes und der Seriennummer zu versehen.
2. Die von der zuständigen Behörde erteilte Genehmigungsnummer ist dauerhaft am Bedienteil der Anlage anzubringen, sodass sie auch nach dem Einbau deutlich sichtbar ist. Die Zulassungsnummer setzt sich wie folgt zusammen:
R-N-NNN
(R = Rhein
N = Nummer des Landes der Zulassung,
wobei 1 =D,2=F,4=NL,6=B, 14=CH
NNN = dreistellige Nummer, die von der zuständigen Behörde festzulegen ist.)
3. Die Genehmigungsnummer darf nur im Zusammenhang mit der zugehörigen Genehmigung verwendet werden. Für die Anfertigung und das Anbringen der Genehmigungsnummer hat der Antragsteller zu sorgen.
4. Die zuständige Behörde teilt der Zentralkommission für die Rheinschifffahrt die erteilte Genehmigungsnummer sowie die Bezeichnung des Typs, den Namen des Herstellers, den Namen des Inhabers der Typgenehmigung und den Tag der Genehmigung umgehend mit.
§ 1.07 Erklärung des Herstellers
Zu jeder Anlage muss eine Erklärung des Herstellers mitgeliefert werden, in der zugesichert ist, dass die Anlage die bestehenden Mindestanforderungen erfüllt und ohne Einschränkungen dem bei der Prüfung vorgestellten Typ baugleich ist.
§ 1.08 Änderungen an genehmigten Anlagen
1. Änderungen an genehmigten Anlagen führen zum Erlöschen der Genehmigung. Soweit Änderungen beabsichtigt sind, sind diese der Prüfbehörde schriftlich mitzuteilen.
2. Die Prüfbehörde entscheidet, ob die Genehmigung weiterhin bestehen bleibt oder ob eine Nachprüfung oder eine erneute Typprüfung notwendig ist. Im Falle einer neuen Genehmigung wird eine neue Genehmigungsnummer erteilt.
Kapitel 2
Allgemeine Mindestanforderungen an Wendeanzeiger
§ 2.01 Konstruktion, Ausführung
1. Wendeanzeiger müssen für den Betrieb an Bord von Schiffen, die in der Rheinschifffahrt eingesetzt werden, geeignet sein.
2. Konstruktion und Ausführung der Anlagen müssen in mechanischer und elektrischer Hinsicht dem Stand der Technik entsprechen.
3. Soweit die Rheinschiffsuntersuchungsordnung oder diese Vorschriften keine abweichenden Regelungen enthalten, gelten für die Anforderungen an die Stromversorgung, die Sicherheit, die gegenseitige Beeinflussung von Bordgeräten, den Kompassschutzabstand, die klimatische Belastbarkeit, die mechanische Belastbarkeit, die Umweltbelastbarkeit, die Lärmemission und die Gerätekennzeichnung die in der Europäischen Norm DIN EN 60945:2003 Navigations- und Funkkommunikationsgeräte und -systeme für die Seeschifffahrt - Allgemeine Anforderungen - Prüfverfahren und geforderte Prüfergebnisse (IEC 60945:2002) festgelegten Anforderungen und Messmethoden. Alle Anforderungen dieser Vorschriften müssen bei Umgebungstemperaturen der Anlagen von 0° C bis 40° C erfüllt werden.
§ 2.02 Abgestrahlte Funkstörungen und elektromagnetische Verträglichkeit
1. Allgemeine Anforderungen
Wendeanzeiger müssen den Anforderungen des Gesetzes über die elektromagnetische Verträglichkeit von Betriebsmitteln vom 26. Februar 2008 (BGBl. I S. 220), das durch Artikel 1 des Gesetzes vom 20. April 2012 (BGBl. I S. 606) geändert worden ist, umgesetzt wurde, entsprechen.
2. Abgestrahlte Funkstörungen
In den Frequenzbereichen 156 - 165 MHz, 450 - 470 MHz und 1,53 - 1,544 GHz darf die Feldstärke den Wert von 15 pV/m nicht überschreiten.
Diese Feldstärken gelten für eine Messdistanz von 3 Metern zum untersuchten Gerät.
§ 2.03 Bedienung
1. Es sollen nicht mehr Bedieneinrichtungen vorhanden sein, als zur ordnungsgemäßen Bedienung erforderlich sind. Ihre Ausführung, Bezeichnung und Betätigung müssen eine einfache, eindeutige und schnelle Bedienung ermöglichen. Sie sind so anzuordnen, dass Bedienungsfehler nach Möglichkeit vermieden werden. Bedienorgane, die für den Normalbetrieb nicht notwendig sind, dürfen nicht unmittelbar zugänglich sein.
2. Alle Bedieneinrichtungen und Anzeigen müssen mit Symbolen bezeichnet oder in englischer Sprache beschriftet sein. Sofern eine Beschriftung erfolgt, muss diese zusätzlich auch in deutscher Sprache angebracht sein. Symbole müssen den in der Europäischen Norm IEC 60417 Graphische Symbole für Betriebsmittel enthaltenen Bestimmungen entsprechen. Ziffern und Buchstaben müssen mindestens 4 mm hoch sein. Wenn aus technischen Gründen eine Schriftgröße von 4 mm für bestimmte Bezeichnungen nachweisbar nicht möglich und aus operationeller Sicht eine kleinere Schrift hinreichend ist, ist eine Minderung auf 3 mm erlaubt.
3. Die Anlage muss so ausgeführt sein, dass Bedienungsfehler nicht zum Ausfall der Anlage führen.
4. Funktionen, die über die Mindestanforderungen hinausgehen, sowie Anschlussmöglichkeiten für externe Geräte müssen so beschaffen sein, dass die Anlage unter allen Bedingungen die Mindestanforderungen erfüllt.
§ 2.04 Bedienungsanleitungen
Zu jeder Anlage muss eine ausführliche Bedienungsanleitung geliefert werden. Diese muss in deutscher, englischer, französischer und niederländischer Sprache erhältlich sein und mindestens folgende Informationen enthalten:
§ 2.05 Einbau und Funktionsprüfung
1. Für den Einbau, den Austausch und die Funktionsprüfung gelten die Bestimmungen des Teils III.
2. Auf dem Sensorteil des Wendeanzeigers ist die Einbaurichtung bezogen auf die Kiellinie anzugeben. Einbauhinweise zur Erzielung einer möglichst geringen Empfindlichkeit gegen andere typische Schiffsbewegungen sind mitzuliefern.
Kapitel 3
Mindestanforderungen an Wendeanzeiger hinsichtlich der Handhabung
§ 3.01 Zugriff auf den Wendeanzeiger
1. Der Wendeanzeiger muss spätestens vier Minuten nach dem Einschalten betriebsbereit sein und innerhalb der geforderten Genauigkeitsgrenzen arbeiten.
2. Die Einschaltung ist optisch anzuzeigen. Die Beobachtung und die Bedienung des Wendeanzeigers müssen gleichzeitig möglich sein.
3. Drahtlose Fernbedienungen sind nicht erlaubt.
§ 3.02 Anzeige der Wendegeschwindigkeit
1. Die Anzeige der Wendegeschwindigkeit muss auf einer linear geteilten Skala mit dem Nullpunkt in der Mitte erfolgen. Die Wendegeschwindigkeit muss nach Richtung und Größe mit der nach § 3.04 vorgeschriebenen Genauigkeit abgelesen werden können. Zeiger- und Balkendarstellungen sind erlaubt.
2. Die Anzeigeskala muss mindestens 20 cm lang sein und kann entweder kreisförmig oder gestreckt ausgeführt sein. Gestreckte Skalen dürfen nur horizontal angeordnet sein.
3. Ausschließlich numerische Anzeigen sind nicht erlaubt.
§ 3.03 Messbereiche
Wendeanzeiger können mit nur einem oder mit mehreren Messbereichen ausgestattet sein. Folgende Messbereiche werden empfohlen:
30°/min, 60°/min, 90°/min, 180°/min, 300°/min.
§ 3.04 Genauigkeit der angezeigten Wendegeschwindigkeit
Der angezeigte Wert darf nicht mehr als 2 % des Bereichsendwertes oder nicht mehr als 10 % vom wahren Wert abweichen. Der jeweils größere Wert ist zulässig (siehe Anhang zu diesem Teil II).
§ 3.05 Empfindlichkeit
Die Ansprechschwelle darf eine Winkelgeschwindigkeitsänderung von 1 % des eingestellten Bereiches nicht überschreiten.
§ 3.06 Funktionsüberwachung
1. Wenn der Wendeanzeiger nicht innerhalb der geforderten Genauigkeitsgrenzen arbeitet, muss dies angezeigt werden.
2. Wenn ein Kreisel benutzt wird, muss die kritische Änderung der Kreiseldrehzahl mit einer Anzeige signalisiert werden. Kritisch ist eine Änderung der Kreiseldrehzahl, die 10 % Rückgang der Genauigkeit bewirkt.
§ 3.07 Unempfindlichkeit gegen andere typische Schiffsbewegungen
1. Rollbewegungen mit Neigungswinkeln bis zu 10' bei Winkelgeschwindigkeiten bis zu 4'/s dürfen keine über die Toleranzgrenzen hinausgehenden Messfehler verursachen.
2. Stoßförmige Belastungen, wie sie zum Beispiel beim Anlegen auftreten können, dürfen keine bleibenden, über die Toleranzgrenzen hinausgehenden, Anzeigefehler verursachen.
§ 3.08 Unempfindlichkeit gegen magnetische Felder
Der Wendeanzeiger muss unempfindlich sein gegen Magnetfelder, die üblicherweise an Bord von Schiffen auftreten können.
§ 3.09 Tochtergeräte
Tochtergeräte müssen alle Anforderungen erfüllen, die an Wendeanzeiger gestellt werden.
Kapitel 4
Technische Mindestanforderungen an Wendeanzeiger
§ 4.01 Bedienung
1. Alle Bedienorgane müssen so angebracht sein, dass während ihrer Betätigung keine korrespondierende Anzeige abgedeckt wird und die Radarnavigation ohne Einschränkung möglich bleibt.
2. Alle Bedienorgane und Anzeigen müssen mit einer blendungsfreien, für alle Lichtverhältnisse geeigneten Beleuchtung ausgerüstet sein, die mit einem unabhängigen Einsteller bis auf Null eingestellt werden kann.
3. Der Betätigungssinn von Bedienorganen muss so sein, dass Betätigungen nach rechts oder nach oben eine positive und Betätigungen nach links oder nach unten eine negative Auswirkung auf die Stellgröße haben.
4. Wenn Drucktasten benützt werden, müssen diese so gestaltet sein, dass sie auch durch Ertasten gefunden und betätigt werden können. Außerdem müssen sie einen deutlich spürbaren Druckpunkt haben.
§ 4.02 Dämpfungseinrichtungen
1. Das Sensorsystem soll kritisch bedämpft sein. Die Dämpfungszeitkonstante von 63 % des Endwertes darf 0,4 s nicht überschreiten.
2. Die Anzeige muss kritisch bedämpft sein. Es darf ein Bedienorgan zur zusätzlichen Vergrößerung der Anzeigebedämpfung vorhanden sein. Keinesfalls darf die Dämpfungszeitkonstante 5 s überschreiten.
§ 4.03 Anschluss von Zusatzgeräten
1. Wenn der Wendeanzeiger eine Möglichkeit zum Anschluss von Tochteranzeigen oder ähnlichem besitzt, muss das Wendegeschwindigkeitssignal als elektrisches Signal zur Verfügung stehen. Das Signal muss galvanisch von Masse getrennt und als proportionale Analogspannung mit 20 mV/'/min ± 5 % und einem Innenwiderstand von maximal 100 Q verfügbar sein. Die Polarität muss positiv für Steuerborddrehung und negativ für Backborddrehung des Schiffes sein. Die Ansprechschwelle darf einen Wert von 0,3'/min nicht überschreiten. Der Nullpunktfehler darf im Temperaturbereich von 0' C bis 40' C einen Wert von 1'/min nicht überschreiten. Bei eingeschaltetem Wendeanzeiger und bewegungsloser Aufstellung des Sensors darf die Störspannung im Ausgangssignal, gemessen hinter einem Tiefpassfilter erster Ordnung mit 10 Hz Bandbreite, 10 mV nicht überschreiten. Das Wendegeschwindigkeitssignal muss mit einer nicht über die Grenzen nach § 4.02 Nummer 1 hinausgehenden Bedämpfung verfügbar sein.
2. Zum Schalten eines externen Alarms muss ein Schaltkontakt vorhanden sein. Dieser Schaltkontakt muss galvanisch vom Wendeanzeiger getrennt sein. Der externe Alarm muss durch Schließen des Schaltkontaktes jeweils aktiviert werden, wenn
Kapitel 5
Prüfbedingungen und Prüfverfahren für Wendeanzeiger
§ 5.01 Sicherheit, Belastungsfähigkeit und Störemission
Die Prüfung der Stromversorgung, der Sicherheit, der gegenseitigen Beeinflussung von Bordgeräten, des Kompassschutzabstandes, der klimatischen Belastbarkeit, der mechanischen Belastbarkeit, der Umweltbelastbarkeit und der Lärmemission erfolgt entsprechend der Europäischen Norm DIN EN 60945:2003.
§ 5.02 Abgestrahlte Funkstörungen
Die Messungen der abgestrahlten Funkstörungen werden entsprechend der Europäischen Norm DIN EN 60945:2003, im Frequenzbereich von 30 MHz bis 2.000 MHz durchgeführt. Die Anforderungen nach § 2.02 Nummer 2 müssen erfüllt sein.
§ 5.03 Prüfverfahren
1. Der Wendeanzeiger wird unter Nennbedingungen und unter Extrembedingungen betrieben und geprüft. Dabei werden die Betriebsspannung und die Umgebungstemperatur bis zu den vorgeschriebenen Grenzen verändert. Außerdem werden Funksender zur Erzeugung der Grenzfeldstärken in der Umgebung des Wendeanzeigers betrieben.
2. Unter den Bedingungen nach vorstehender Nummer 1 muss der Anzeigefehler innerhalb der in dem Anhang zu diesem Teil II dargestellten Toleranzgrenzen liegen. Alle anderen Anforderungen müssen erfüllt sein.
| Fehlergrenzen für Wendeanzeiger | Anhang |
Teil III
Vorschriften für den Einbau und die Funktionsprüfung von Navigationsradaranlagen und Wendeanzeigern in der Rheinschifffahrt
§ 1 Ziel dieser Vorschriften
Mit diesen Vorschriften soll sichergestellt werden, dass im Interesse der Sicherheit und Leichtigkeit der Binnenschifffahrt Navigationsradar- und Wendeanzeigeranlagen nach optimalen technischen und ergonomischen Gesichtspunkten eingebaut werden und anschließend eine Funktionsprüfung erfolgt. Inland-ECDIS-Geräte, die im Navigationsmodus betrieben werden können, sind Navigationsradaranlagen im Sinne dieser Vorschriften.
§ 2 Zulassung der Geräte
Für die Radarfahrt in der Rheinschifffahrt dürfen nur Geräte eingebaut werden, die eine Zulassung nach den geltenden Vorschriften der Zentralkommission für die Rheinschifffahrt besitzen und die eine Zulassungsnummer tragen oder auf Grund gleichwertiger Typgenehmigungen zugelassene Geräte.
§ 3 Anerkannte Fachfirmen
1. Der Einbau oder Austausch sowie die Reparatur oder Wartung von Radaranlagen und Wendeanzeigern dürfen nur von geeigneten Fachfirmen, die von der zuständigen Behörde auf der Grundlage von § 1 anerkannt sind, erfolgen. Die zuständigen Behörden sind der Zentralkommission für die Rheinschifffahrt bekannt zu geben.
2. Die Anerkennung kann von der zuständigen Behörde widerrufen werden, wenn die Fachfirma den Anforderungen nach § 1 nicht mehr gerecht wird.
3. Die zuständige Behörde teilt die Namen, Adressen, Telefonnummern und Emailadressen der von ihr anerkannten Fachfirmen der Zentralkommission für die Rheinschifffahrt umgehend mit.
§ 4 Anforderungen an die Bordstromversorgung
Die Stromzuführungen für Radaranlagen und Wendeanzeiger müssen jeweils eine eigene Absicherung haben und möglichst ausfallsicher sein.
§ 5 Einbau der Radarantenne
1. Die Radarantenne soll so nahe wie möglich über der Mittellängsachse des Schiffes eingebaut werden. Im Strahlungsbereich der Antenne soll sich kein Hindernis befinden, das Fehlechos oder unerwünschte Abschattungen verursachen kann; gegebenenfalls muss die Antenne auf dem Vorschiff installiert werden. Die Aufstellung und die Befestigung der Radarantenne in der Betriebsposition müssen so stabil sein, dass die Radaranlage mit der geforderten Genauigkeit arbeiten kann.
2. Nachdem der Einbauwinkelfehler korrigiert worden ist, darf nach dem Einstellen des Radarbildes die Abweichung zwischen Vorauslinie und Schiffslängsachse nicht größer als 1° sein.
§ 6 Einbau des Radarsichtgerätes und des Bedienteils
1. Radarsichtgerät und Bedienteil müssen im Steuerhaus so eingebaut werden, dass die Auswertung des Radarbildes und die Bedienung der Radaranlage mühelos möglich sind. Die azimutale Anordnung des Radarbildes muss mit der natürlichen Lage der Umgebung übereinstimmen. Halterungen und verstellbare Konsolen sind so zu konstruieren, dass sie in jeder Lage ohne Eigenschwingung arretiert werden können
2. Während der Radarfahrt darf künstliches Licht keine Reflexionen in Richtung des Radarbeobachters hervorrufen.
3. Wenn die Bedienteile nicht im Sichtgerät eingebaut sind, müssen sie sich in einem Gehäuse befinden, das nicht mehr als 1 m vom Bildschirm entfernt angeordnet sein darf. Drahtlose Fernbedienungen sind nicht erlaubt.
4. Soweit Tochtergeräte eingebaut werden, unterliegen sie den Vorschriften, die für Navigationsradaranlagen gelten.
§ 7 Einbau des Wendeanzeigers
1. Das Sensorteil ist möglichst mittschiffs, horizontal und auf die Längsachse des Schiffes ausgerichtet einzubauen. Der Einbauort soll möglichst schwingungsfrei sein und geringen Temperaturschwankungen unterliegen. Das Anzeigegerät ist möglichst über dem Radarsichtgerät einzubauen.
2. Soweit Tochtergeräte eingebaut werden, unterliegen sie den Vorschriften, die für Wendeanzeiger gelten.
§ 8 Einbau des Positionssensors
Der Positionssensor, insbesondere eine DGPS-Antenne, muss so eingebaut werden, dass er die bestmögliche Genauigkeit erzielt und durch Aufbauten und Sendeanlagen an Bord möglichst wenig beeinträchtigt wird.
§ 9 Einbau- und Funktionsprüfung
Vor der ersten Inbetriebnahme nach dem Einbau, bei Erneuerungen oder Verlängerungen des Schiffsattestes, ausgenommen nach Anhang II § 2.09 Nummer 2, sowie nach jedem Umbau am Schiff, der die Betriebsverhältnisse dieser Anlagen beeinträchtigen könnte, muss von der zuständigen Behörde oder von einer nach § 3 anerkannten Fachfirma eine Einbau- und Funktionsprüfung durchgeführt werden.
Dabei müssen die folgenden Bedingungen erfüllt sein:
Für Inland-ECDIS-Geräte müssen zudem die folgenden Bedingungen erfüllt sein:
§ 10 Bescheinigung über Einbau und Funktion
Nach erfolgreicher Prüfung nach § 9 stellt die zuständige Behörde oder die anerkannte Fachfirma eine Bescheinigung nach dem Muster des Teils IV dieser Anlage aus. Diese Bescheinigung ist ständig an Bord mitzuführen. Bei Nichterfüllung der Prüfbedingungen wird eine Mängelliste ausgestellt. Eine eventuell noch vorhandene Bescheinigung wird eingezogen oder durch die anerkannte Fachfirma der zuständigen Behörde übersandt.
Teil IV
(Muster)
Bescheinigung über Einbau und Funktion von Navigationsradaranlagen und Wendeanzeigern in der Rheinschifffahrt
Art/Name des Schiffes: ...........................................................................................................................
Einheitliche europäische Schiffsnummer: ...................................................................................................
Schiffseigner
Name: ....................................................................................................................................................
Anschrift: ................................................................................................................................................
Telefon: ..................................................................................................................................................
| Radargeräte | Anzahl: .................................................................. |
| lfd. Nr. | Typ | Hersteller | Zulassungsnummer | Seriennummer |
| Wendeanzeiger | Anzahl: ............................................................ |
| lfd. Nr. | Typ | Hersteller | Zulassungsnummer | Seriennummer |
Hiermit wird bescheinigt, dass Radaranlagen und Wendeanzeiger dieses Schiffes den Vorschriften der Anlage M Teil III des Anhangs II der Binnenschiffsuntersuchungsordnung, für den Einbau und die Funktionsprüfung von Navigationsradaranlagen und Wendeanzeigern in der Rheinschifffahrt entsprechen.
Anerkannte Fachfirma
Name: .....................................................................................................................................................
Anschrift: .................................................................................................................................................
Telefon: ...................................................................................................................................................
| Stempel | Ort ............................................ | Datum ......................... |
| Unterschrift ................................................................................................. | ||
Anerkennungsbehörde
Name: .....................................................................................................................................................
Anschrift: .................................................................................................................................................
Telefon: ...................................................................................................................................................
Teil V
(Muster)
1. Verzeichnis der nach Anhang II Anlage M der Binnenschiffsuntersuchungsordnung für die Zulassung von Navigationsradaranlagen und Wendeanzeigern zuständigen Behörden
| Land | Name | Adresse | Telefonnummer | E-Mailadresse |
| Belgien | ||||
| Deutschland | ||||
| Frankreich | ||||
| Niederlande | ||||
| Schweiz |
Ist keine Behörde angegeben, wurde seitens des betreffenden Staates keine zuständige Behörde benannt.
2. Verzeichnis der nach Anhang II Anlage M der Binnenschiffsuntersuchungsordnung zugelassenen Navigationsradaranlagen und Wendeanzeiger
| lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
3. Verzeichnis der nach Anhang II Anlage M der Binnenschiffsuntersuchungsordnung auf Grund gleichwertiger Typgenehmigungen zugelassenen Navigationsradaranlagen und Wendeanzeigern
| lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
4. Verzeichnis der nach Anhang II Anlage M der Binnenschiffsuntersuchungsordnung für den Einbau oder Austausch von Navigationsradaranlagen und Wendeanzeigern anerkannten Fachfirma
Belgien
| lfd. Nr. | Name | Adresse | Telefonnummer | |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennnung ausgesprochen.
Deutschland
| lfd. Nr. | Name | Adresse | Telefonnummer | |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennnung ausgesprochen.
Frankreich
| lfd. Nr. | Name | Adresse | Telefonnummer | |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennnung ausgesprochen.
Niederlande
| lfd. Nr. | Name | Adresse | Telefonnummer | |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennnung ausgesprochen.
Schweiz
| lfd. Nr. | Name | Adresse | Telefonnummer | |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennnung ausgesprochen.
| Anlage N 17 |
Teil I
- gilt nur für Fahrzeuge mit Schiffsattest -
Anforderungen an Inland AIS Geräte und Vorschriften betreffend den Einbau und die Funktionsprüfung von Inland AIS Geräten
A. Anforderungen an Inland AIS Geräte 17
Inland AIS Geräte müssen die Anforderungen des im Beschluss 2007-I-15 enthaltenen Test Standards, Edition 2.0, einhalten. Die Einhaltung wird durch eine Typgenehmigungsprüfung einer zuständigen Behörde nachgewiesen.
B. Einbau und Funktionsprüfung von Inland AIS Geräten an Bord 17
Beim Einbau von Inland AIS Geräten an Bord sind folgende Bedingungen einzuhalten:
| Sensor | Mindestanforderungen (IMO) | DIN/EN/ISO Standard |
| GPS | MSC.1 12(73) | DIN EN 61108-1:2004 |
| DGPS/DGLONASS | MSC.1 14(73) | DIN EN 61108-4:2005 |
| Galileo | MSC.233(82) | DIN EN 61108-3:2011 |
| Heading/GPS Kompass | MSC.1 16(73) | DIN ISO 22090-3:2015 Teil 3: GNSS-Verfahren |
1) Amtlicher Hinweis: diese Norm entspricht der Norm IEC 61108-1 : 2003
2) Amtlicher Hinweis: diese Norm entspricht der Norm IEC 61108-4: 2004
3) Amtlicher Hinweis: diese Norm entspricht der Norm IEC 61108-3 : 2010
4) Amtlicher Hinweis: diese Norm entspricht der Europäischen Norm ISO 22090-3 : 2004 + Cor. 1 : 2005 Part 3 : GNSS principles
C. Unterrichtung der Zentralkommission für die Rheinschifffahrt
Die Rheinuferstaaten und Belgien teilen der Zentralkommission unverzüglich
mit.
Teil II
- gilt nur für Fahrzeuge mit Schiffsattest - (Muster)
Bescheinigung über Einbau und Funktion von Inland AIS Geräten
Art/Name des Schiffes: .........................................................
Einheitliche europäische Schiffsnummer oder amtliche Schiffsnummer: .........................................
Schiffseigner
Name: ...............................................................................
Anschrift: ............................................................................................................
Telefon: ......................................................
Inland AIS Gerät
| Typ | Hersteller | Zulassungsnummer | Seriennummer |
Hiermit wird bescheinigt, dass das Inland AIS Gerät dieses Fahrzeugs den Vorschriften der Anlage N, Teil I, Rheinschiffsuntersuchungsordnung, Anforderungen an Inland AIS Geräte und Vorschriften betreffend den Einbau und die Funktionsprüfung von Inland AIS Geräten, entspricht und dass eine Bedienungsanleitung zum Verbleib auf dem Fahrzeug ausgehändigt wurde.
Anerkannte Fachfirma
Name: ..............................................................................
Anschrift: .............................................................................................................
Telefon: .....................................
Stempel
Unterschrift
Ort ................... Datum ....................
Zuständige Behörde für die Anerkennung der Fachfirma
Name: .............................................................
Anschrift: ..........................................................................................................
Telefon: ...........................................................
Teil III
- gilt nur für Fahrzeuge mit Schiffsattest -
(Muster)
1. Verzeichnis der nach der Rheinschiffsuntersuchung für die Zulassung von Inland AIS Geräten zuständigen Behörden
| Land | Name | Adresse | Telefonnummer | E-Mail-Adresse |
| Belgien | ||||
| Deutschland | ||||
| Frankreich | ||||
| Niederlande | ||||
| Schweiz |
Ist keine Behörde angegeben, wurde seitens des betreffenden Staates keine zuständige Behörde benannt.
2. Verzeichnis der nach der Rheinschiffsuntersuchung zugelassenen Inland AIS Geräte 17
Verzeichnis der vom 1. April 2008 bis zum 18. Oktober 2012 aufgrund von Typgenehmigungen gemäß dem Test Standard, Edition 1.0 und 1.01, zugelassenen Inland AIS Geräte
Inland AIS Geräte, deren Typgenehmigung auf Basis der Edition 1.0 und 1.01 des Test Standards erfolgte, dürfen bis zum 30.11.2015 eingebaut und über dieses Datum hinaus weiterhin betrieben werden.
| Lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
Verzeichnis der ab dem 19. Oktober 2012 aufgrund von Typgenehmigungen gemäß dem Test Standard, Edition 2.0, zugelassenen Inland AIS Geräte
| Lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
3. Verzeichnis der nach der Rheinschiffsuntersuchung aufgrund gleichwertiger Typgenehmigungen zugelassenen Inland AIS Geräte 17
| lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
Verzeichnis der vom 1. April 2008 bis zum 18. Oktober 2012 aufgrund von Typgenehmigungen gemäß dem Test Standard, Edition 1.0 und 1.01, zugelassenen Inland AIS Geräte
Inland AIS Geräte, deren Typgenehmigung auf Basis der Edition 1.0 und 1.01 des Test Standards erfolgte, dürfen bis zum 30.11.2015 eingebaut und über dieses Datum hinaus weiterhin betrieben werden.
| Lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
Verzeichnis der ab dem 19. Oktober 2012 aufgrund von Typgenehmigungen gemäß dem Test Standard, Edition 2.0, zugelassenen Inland AIS Geräte
| Lfd. Nr. | Typ | Hersteller | Inhaber der Typgenehmigung | Tag der Zulassung | zuständige Behörde | Zulassungs-Nr. |
4. Verzeichnis der nach der Rheinschiffsuntersuchung für den Einbau oder Austausch von Inland AIS Geräten anerkannten Fachfirmen
Belgien
| lfd. Nr. | Name | Adresse | Telefonnummer | E-Mail-Adresse |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennung ausgesprochen.
Deutschland
| lfd. Nr. | Name | Adresse | Telefonnummer | E-Mail-Adresse |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennung ausgesprochen.
Frankreich
| lfd. Nr. | Name | Adresse | Telefonnummer | E-Mail-Adresse |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennung ausgesprochen.
Niederlande
| lfd. Nr. | Name | Adresse | Telefonnummer | E-Mail-Adresse |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennung ausgesprochen.
Schweiz
| lfd. Nr. | Name | Adresse | Telefonnummer | E-Mail-Adresse |
Ist keine Fachfirma angegeben, wurde für Firmen in diesem Land keine Anerkennung ausgesprochen.
| - gilt nur für Fahrzeuge mit Schiffsattest - Verzeichnis der dem Schiffsattest nach § 1.03 als gleichwertig anerkannten Zeugnisse und Modalitäten für deren Anerkennung | Anlage O 12a |
| Lfd. Nr. | Dem Schiffsattest nach § 1.03 als gleichwertig anerkannte Zeugnisse | Modalitäten für deren Anerkennung | Datum der Anerkennung |
| 1 | Nach dem 30. Dezember 2008 erteilte oder erneuerte Gemeinschaftszeugnisse für Binnenschiffe, die bestätigen, dass die damit ausgestatteten Fahrzeuge unbeschadet der Übergangsbestimmungen nach Anhang II Kapitel 24 den technischen Vorschriften des Anhangs II der Richtlinie 2006/87/EG über die technischen Vorschriften für Binnenschiffe und zur Aufhebung der Richtlinie 82/714/EWG in der jeweils geltenden Fassung in vollem Umfang entsprechen. | Auf dem Rhein verkehrende Fahrzeuge, die nach dem 30. Dezember 2008 ein Gemeinschaftszeugnis erhalten haben, müssen Motoren eingebaut haben, die entweder die Grenzwerte der Zentralkommission für die Rheinschifffahrt, wie in der Rheinschiffsuntersuchungsordnung festgelegt, oder die vergleichbaren Grenzwerte der Richtlinie 97/68/EG in der jeweils geltenden Fassung einhalten. | 27.11.2008. |
| Daten zur Identifikation eines Fahrzeuges | Anlage P |
Sofern vorhanden
| Dienstanweisungen nach § 1.07 | Anlage Q 12a 14a 17 |
Hinweis:
Die Zentralstelle Schiffsuntersuchungskommission/Schiffseichamt kann für Fahrzeuge, die auf Wasserstraßen der Zonen 3 und 4 verkehren, für die in Anhang IV angeführten Bereiche Abweichungen von den in den nachfolgenden Dienstanweisungen angegebenen diesbezüglichen Werten gestatten.
Die Zentralstelle Schiffsuntersuchungskommission/Schiffseichamt kann für Fahrzeuge, die auf Wasserstraßen der Zonen 1 und 2 verkehren, für die in Anhang III angeführten Bereiche höhere Anforderungen in Bezug auf die in den folgenden Dienstanweisungen angegebenen diesbezüglichen Werte festlegen.
Dienstanweisung Nr. 1
Anforderungen an die Ausweich- und Wendeeigenschaften
(§§ 5.09 und 5.10 i. V. m. § 5.02 Nr. 1, § 5.03 Nr. 1, §§ 5.04 und 16.06 des Anhangs II)
1. Allgemeines und Randbedingungen für die Durchführung des Ausweichmanövers
1.1 Nach § 5.09 müssen Schiffe und Verbände rechtzeitig ausweichen können und die Ausweicheigenschaften sind durch Ausweichmanöver auf einer Probefahrtstrecke nach § 5.03 nachzuweisen. Dies ist durch simulierte Ausweichmanöver nach Backbord und Steuerbord mit vorgegebenen Größen, bei denen für bestimmte Drehgeschwindigkeiten des Anschwenkens und des Stützens Grenzwerte für den dabei benötigten Zeitbedarf einzuhalten sind, nachzuweisen.
Dabei sind die Anforderungen nach Nummer 2 zu erfüllen, und zwar unter Einhaltung einer Flottwassertiefe von mindestens 20 % des Tiefgangs, mindestens jedoch 0,50 m.
2. Durchführung des Ausweichmanövers und Messwertaufnahme
(Schematische Darstellung in Anhang 1 zu dieser Dienstanweisung)
2.1 Das Ausweichmanöver ist wie folgt durchzuführen:
Aus der konstanten Anfangsgeschwindigkeit von Vo = 13 km/h gegen Wasser ist bei Beginn des Manövers (Zeitpunkt to = 0 s, Drehgeschwindigkeit r = 0 °/min, Ruderwinkel δo = 0°, konstante Motordrehzahleinstellung) durch Ruderlegen eine Ausweichbewegung des Schiffes oder Verbandes nach Backbord oder Steuerbord einzuleiten. Der Ruderwinkel S oder die Stellung des Steuerorgans δa bei aktiven Steuereinrichtungen ist nach den Angaben unter 2.3 bei Beginn des Ausweichmanövers einzustellen. Der eingestellte Ruderwinkel δ(z.B. 20° Steuerbord) ist beizubehalten, bis der unter 2.2 genannte Wert der Drehgeschwindigkeit r1 für die jeweilige Schiffs- oder Verbandsgröße erreicht ist. Bei Erreichen der Drehgeschwindigkeit r1 ist der Zeitpunkt t1 aufzunehmen und Gegenruder mit dem gewählten Ruderwinkel δ(z.B. 20° Backbord) zu geben (Stützen), um die Anschwenkbewegung zu beenden und in die Gegenrichtung anzuschwenken, d. h. die Drehgeschwindigkeit auf den Wert r2 = 0 zurückzuführen und wieder auf den unter 2.2 genannten Wert ansteigen zu lassen. Der Zeitpunkt t2, wenn die Drehgeschwindigkeit r2 = 0 erreicht ist, ist aufzunehmen. Bei Erreichen der Drehgeschwindigkeit r3 nach 2.2 ist Gegenruder mit dem gleichen Ruderwinkel δzu geben, um die Drehbewegung zu beenden. Der Zeitpunkt t3 ist aufzunehmen. Wenn die Drehgeschwindigkeit r4 = 0 erreicht ist, ist der Zeitpunkt t4 aufzunehmen und anschließend ist das Schiff oder der Verband mit frei wählbaren Ruderbewegungen auf Ausgangskurs zu bringen.
2.2 Folgende Grenzwerte für das Erreichen der Drehgeschwindigkeit r4 in Abhängigkeit der Schiffs- oder Verbandsgrößen und der Wassertiefe h sind einzuhalten:
| Schiffs- oder Verbandsgröße L x B | Einzuhaltende Drehgeschwindigkeit r1 = r3 [°/min] | Einzuhaltende Grenzwerte für den Zeitbedarf t4 [s] in flachem und tiefem Wasser | ||||
| δ= 20° | δ= 45° | 1,2 < h/T < 1,4 | 1,4 < h/T < 2 | h/T > 2 | ||
| 1 | Alle Motorschiffe; einspurige Schiffsverbände < 110 x 11,45 | 20°/min | 28°/min | 150 s | 110 s | 110 s |
| 2 | Einspurige Schiffsverbände bis 193 x 11,45 oder zweispurige Schiffsverbände bis 110 x 22,90 | 12°/min | 18°/min | 180 s | 130 s | 110 s |
| 3 | Zweispurige Schiffsverbände < 193 x 22,90 | 8°/min | 12°/min | 180 s | 130 s | 110 s |
| 4 | Zweispurige Schiffsverbände bis 270 x 22,90 oder dreispurige Schiffsverbände bis 193 x 34,35 | 6°/min | 8°/min | * | * | * |
| *) nach Festlegung des nautischen Sachverständigen | ||||||
Der Zeitbedarf t1, t2, t3 und t4 für das Erreichen der Drehgeschwindigkeit r1, r2, r3 und r4 ist im Messprotokoll nach Anlage 2 zu dieser Dienstanweisung zu vermerken. Die Werte t4 dürfen die in der Tabelle festgelegten Grenzwerte nicht überschreiten.
2.3 Es sind mindestens vier Ausweichmanöver durchzuführen und zwar je ein Ausweichmanöver
Bei Bedarf (z.B. bei Unsicherheit über die Messwerte oder unbefriedigendem Verlauf) sind die Ausweichmanöver zu wiederholen. Die nach 2.2 vorgegebenen Drehgeschwindigkeiten und Grenzwerte für den Zeitbedarf müssen eingehalten werden. Für aktive Steuereinrichtungen oder besondere Ruderbauarten sind die Stellung des Steuerorgans δa oder der Ruderwinkel δa gegebenenfalls im Ermessen des Sachverständigen unter Berücksichtigung der Bauart der Steuereinrichtung abweichend von δ = 20° und δ= 45° festzulegen.
2.4 Für die Feststellung der Drehgeschwindigkeit muss sich an Bord ein Wendeanzeiger befinden, der den Vorschriften betreffend die Mindestanforderungen und Prüfbedingungen für Wendeanzeiger in der Rheinschifffahrt entspricht.
2.5 Der Ladungszustand beim Ausweichmanöver soll nach § 5.04 möglichst 70 % bis 100 % der maximalen Tragfähigkeit betragen. Wird die Probefahrt mit geringerer Beladung durchgeführt, ist die Zulassung für die Talfahrt und für die Bergfahrt auf diese Beladung zu beschränken.
Der Ablauf der Ausweichmanöver und die verwendeten Bezeichnungen können der schematischen Darstellung des Anhangs 1 zu dieser Dienstanweisung entnommen werden.
3. Wendeeigenschaften
Die Wendeeigenschaften von Schiffen und Verbänden mit L von nicht mehr als 86 m und B von nicht mehr als 22,90 m sind ausreichend im Sinne des § 5.10 i. V. m. § 5.02 Nr. 1, wenn bei einem Aufdrehmanöver mit einer Anfangsgeschwindigkeit von 13 km/h gegen Wasser die Grenzwerte für das Anhalten Bug zu Tal nach der Dienstanweisung Nummer 2 eingehalten wurden. Dabei sind die Flottwasserbedingungen nach 1.1 einzuhalten.
4. Sonstige Anforderungen
4.1 Unabhängig von den Anforderungen nach den Nummern 1 bis 3 muss
Diese Anforderung ist auch bei voller Schiffsgeschwindigkeit bei einer Ruderbewegung über den Bereich von 35° Backbord nach 35° Steuerbord zu prüfen. Außerdem ist zu prüfen, ob das Ruder bei voller Antriebsleistung die äußerste Stellung beibehält. Bei aktiven Steuereinrichtungen oder besonderen Ruderbauarten ist diese Bestimmung sinngemäß anzuwenden.
4.2 Sind zum Erreichen der Manövriereigenschaften zusätzliche Einrichtungen nach § 5.05 erforderlich, müssen diese den Anforderungen des Kapitels 6 entsprechen und unter Nummer 52 des Schiffsattestes ist folgender Vermerk einzutragen:
"Die unter Nummer 34 genannten Flankenruder * / Bugsteuereinrichtungen * / andere Einrichtungen * ist * /sind * zum Erreichen der Manövriereigenschaften nach Kapitel 5 erforderlich."
5. Aufnahme der Messwerte und Protokollierung
Messung, Protokollierung und Aufzeichnung der Versuchsdaten sind nach dem in Anlage 2 zu dieser Dienstanweisung beschriebenen Verfahren durchzuführen.
______
*) Nichtzutreffendes streichen.
| Schematische Darstellung des Ausweichmanövers | Anlage 1 zur Dienstanweisung Nr. 1 |

| t0 | = Beginn des Ausweichmanövers |
| t1 | = Zeitpunkt bei Erreichen der Drehgeschwindigkeit r1 |
| t2 | = Zeitpunkt bei Erreichen der Drehgeschwindigkeit r2 = 0 |
| t3 | = Zeitpunkt bei Erreichen der Drehgeschwindigkeit r3 |
| t4 | = Zeitpunkt bei Erreichen der Drehgeschwindigkeit r4 = 0 (Ende des Ausweichmanövers) |
| δ | = Ruderwinkel [°] |
| r | = Drehgeschwindigkeit [°/min] |
| Messprotokoll Ausweichmanöver und Wendeeigenschaften | Anlage 2 zur Dienstanweisung Nr. 1 |
Untersuchungskommission: ............................................................................
Datum: .....................................................................................................
Name: ......................................................................................................
Name des Fahrzeuges: ...................................................................................
Eigentümer: ...............................................................................................
| Art des Fahrzeuges oder Verbandes: ........................... | Strecke: ....................................... |
| L x B [m x m]: .............................. | Pegel [m]: .................................... |
| TVersuch[m]: .................................. | Wassertiefe h [m]: ........................... |
| h/T: ............................................. | |
| Beladung (beim Versuch) [t]: ......................... | Strömungsgeschwindigkeit [m/s]: ........ |
| % der maximalen Tragfähigkeit: ................................ |
Wendegeschwindigkeitsanzeiger
Typ: .........................................................................................................
Ruderbauart: übliche Bauart/besondere Bauart *
Aktive Steuereinrichtung: ja/nein *
Messwerte der Ausweichmanöver:
| Zeitbedarf t1 bis t4
beim Ausweichmanöver | Ruderwinkel δoder δa* bei Beginn des Ausweichmanövers und einzuhaltende Drehgeschwindigkeit r1 = r3 |
Bemerkungen | |||
| δ= 20° StB * δa = .... StB * | δ = 20° BB * δa = .... BB * | δ= 45° StB * δa = .... StB * | δ = 45° BB * δa = .... BB * | ||
| r1 = r3 = ........ °/min | r1 = r3 = ........ °/min | ||||
| t1[s] | |||||
| t2[s] | |||||
| t3[s] | |||||
| t4[s] | |||||
| Grenzwert t4 nach 2.2 | Grenzwert t4 = ......................................... [s] | ||||
Wendeeigenschaften *
Standort am Anfang des Wendemanövers ............................... km
Standort am Ende des Wendemanövers .................................. km
Rudermaschine
Art des Antriebs: Hand/motorisch *
Ruderausschlag je Umdrehung *: .......................................................................o
Winkelgeschwindigkeit des Ruders über den gesamten Bereich *: ................................°/s
Winkelgeschwindigkeit des Ruders über den Bereich * 35° BB nach 35° StB: ..................°/s
______
*) Nichtzutreffendes streichen.
Dienstanweisung Nr. 2
Anforderungen an die Mindestgeschwindigkeit, Stoppeigenschaften und Rückwärtsfahreigenschaften
(§§ 5.06, 5.07 und 5.08 i. V. m. § 5.02 Nr. 1, § 5.03 Nr. 1, §§ 5.04 und 16.06 des Anhangs II)
1. Mindestgeschwindigkeit nach § 5.06
Die Geschwindigkeit gegen Wasser ist ausreichend im Sinne des § 5.06 Nr. 1, wenn sie mindestens 13 km/h beträgt. Dabei müssen, wie bei der Feststellung der Stoppeigenschaften:
2. Stoppeigenschaften und Rückwärtsfahreigenschaften gemäß den §§ 5.07 und 5.08
2.1 Schiffe und Verbände können rechtzeitig Bug zu Tal anhalten im Sinne des § 5.07 Nr. 1, wenn das Anhalten Bug zu Tal gegen Grund bei einer Anfangsgeschwindigkeit von 13 km/h gegen Wasser, einer Flottwassertiefe von mindestens 20 % des Tiefgangs, mindestens jedoch 0,50 m, nachgewiesen wird. Dabei sind folgende Grenzwerte einzuhalten:
oder
480 m bei Schiffen und Verbänden mit einer
erreicht werden. Das Stoppmanöver endet bei Stillstand gegen Land.
350 m bei Schiffen und Verbänden mit einer
oder
305 m bei Schiffen und Verbänden mit einer
erreicht werden. Außerdem sind in stillen Gewässern zusätzlich die Rückwärtsfahreigenschaften durch einen Rückwärtsfahrversuch nachzuweisen. Dabei muss bei Rückwärtsfahrt eine Geschwindigkeit von mindestens 6,5 km/h erreicht werden.
Messung, Protokollierung und Aufzeichnung von Versuchsdaten nach Buchstabe a oder b sind nach dem in der Anlage 1 zu dieser Dienstanweisung beschriebenen Verfahren durchzuführen.
Während des gesamten Versuchs muss das Schiff oder der Verband ausreichend manövrierfähig bleiben.
2.2 Der Beladungszustand beim Versuch soll nach § 5.04 möglichst 70 - 100 % der maximalen Tragfähigkeit betragen. Dieser Beladungszustand ist gemäß Anlage 2 zu dieser Dienstanweisung zu bewerten. Hat das Schiff oder der Verband beim Versuch eine geringere Beladung als 70 %, ist die zugelassene Verdrängung für die Talfahrt entsprechend der vorhandenen Beladung festzulegen, sofern die Grenzwerte gemäß 2.1 eingehalten werden.
2.3 Entsprechen beim Versuch die tatsächlichen Werte der Anfangsgeschwindigkeit und der Strömungsgeschwindigkeit nicht den in 2.1 festgelegten Voraussetzungen, sind die erhaltenen Ergebnisse nach dem in Anlage 2 zu dieser Dienstanweisung beschriebenen Verfahren zu bewerten.
Die Abweichung von der vorgegebenen Anfangsgeschwindigkeit von 13 km/h darf höchstens + 1 km/h betragen, im strömenden Wasser muss die Strömungsgeschwindigkeit zwischen 1,3 und 2,2 m/s betragen, andernfalls sind die Versuche zu wiederholen.
2.4 Die höchste in der Talfahrt zugelassene Verdrängung oder die sich daraus ergebende größte Beladung oder der maximale eingetauchte Querschnitt der Schiffe und Verbände ist auf der Grundlage der Versuche festzulegen und in das Schiffsattest einzutragen.
| Messung, Protokollierung und Aufzeichnung von Versuchsdaten beim Stoppmanöver | Anlage 1 zur Dienstanweisung Nr. 2 |
1. Stoppmanöver
Die in Kapitel 5 bezeichneten Schiffe und Verbände müssen auf einer Probefahrtstrecke in strömenden oder stillen Gewässern ein Stoppmanöver durchführen, um nachzuweisen, dass sie mit Hilfe ihrer Antriebsanlage ohne Benutzung von Ankern Bug zu Tal anhalten können. Das Stoppmanöver ist grundsätzlich nach dem in Bild 1 dargestellten Ablauf durchzuführen. Es beginnt bei der Fahrt mit konstanter Geschwindigkeit - die möglichst genau 13 km/h gegenüber Wasser betragen soll - mit dem Umsteuern von "voraus" auf "rückwärts" (Punkt A beim Kommando "Stopp") und endet beim Erreichen des Stillstandes gegen Land (Punkt E : v = 0 gegen Land oder Punkt D = Punkt E : v = 0 gegen Wasser und gegen Land bei Stoppmanövern in stillen Gewässern).
Bei Stoppmanövern in strömenden Gewässern müssen auch Standort und Zeitpunkt des Erreichens von Stillstand gegen Wasser (Schiff bewegt sich mit Strömungsgeschwindigkeit Punkt D : v = 0 gegen Wasser) festgehalten werden.
Die Messwerte sind in einem Messprotokoll entsprechend der Darstellung in Tabelle 1 zu vermerken. Vor der Durchführung des Stoppmanövers sind die geforderten feststehenden Angaben im Kopf des Messprotokolls aufzunehmen.
Die mittlere Strömungsgeschwindigkeit (vSTR) des Gewässers im Bereich des Fahrwassers ist - soweit bekannt - in Abhängigkeit des Pegelstandes oder durch Messung der Bewegung eines Schwimmkörpers festzustellen und im Messprotokoll zu vermerken.
Grundsätzlich ist auch die Verwendung von geeichten Messflügeln zur Erfassung der Schiffsgeschwindigkeit gegen Wasser während des Stoppmanövers zulässig, wenn damit der Bewegungsablauf und die Messdaten im zuvor beschriebenen Sinne erfasst werden können.
2. Aufnahme der Messwerte und Protokollierung (Tabelle 1)
Zunächst ist die Anfangsgeschwindigkeit gegen Wasser für das Stoppmanöver festzustellen. Dies kann durch Messung der Zeitintervalle zwischen jeweils zwei Landmarken erfolgen. In strömenden Gewässern ist dabei deren mittlere Strömungsgeschwindigkeit zu berücksichtigen.
Das Stoppmanöver beginnt mit dem Kommando "Stopp" A beim Passieren einer Landmarke. Das Passieren der Landmarke ist senkrecht zur Längsachse des Schiffes festzustellen und zu protokollieren. Das Passieren aller weiteren Landmarken während des Stoppmanövers ist auf gleiche Weise festzustellen und die jeweilige Landmarke (z.B. Kilometrierung) und der Zeitpunkt des Passierens im Messprotokoll festzuhalten.
Die Aufnahme der Messwerte soll möglichst im Abstand von 50 m erfolgen. Der jeweilige Zeitpunkt des Erreichens der Punkte B und C - soweit feststellbar - sowie die Punkte D und E sind zu vermerken und der jeweilige Standort abzuschätzen. Die im Messprotokoll vorgesehenen Angaben zur Drehzahl müssen nicht aufgenommen werden, sollten aber zum besseren Einstellen der Anfangsgeschwindigkeit festgehalten werden.
3. Darstellung des Ablaufs des Stoppmanövers
Der Ablauf des Stoppmanövers gemäß Bild 1 ist im Diagramm darzustellen. Dazu ist zunächst die Weg-Zeit-Kurve unter Verwendung der Daten des Messprotokolls zu zeichnen, und die Punkte A bis E sind zu kennzeichnen. Anschließend können die Werte der mittleren Geschwindigkeit zwischen jeweils zwei Messpunkten ermittelt und die Geschwindigkeits-Zeit-Kurve gezeichnet werden.
Das geschieht folgendermaßen (siehe Bild 1):
Durch Bildung des Quotienten einer Wegdifferenz und der dazugehörigen Zeitdifferenz Δs/Δt wird die mittlere Schiffsgeschwindigkeit für eben diese Zeitdifferenz ermittelt.
Beispiel:
Für das Zeitintervall von 0 Sekunde bis 10 Sekunden wird die Wegstrecke von 0 m bis 50 m zurückgelegt.
Δs/Δt = 50 m/10 s = 5,0 m/s = 18,0 km/h
Dieser Wert wird als mittlere Geschwindigkeit über dem Abszissenwert von 5 Sekunden aufgetragen. Im zweiten Zeitintervall von 10 Sekunden bis 20 Sekunden werden 45 m zurückgelegt.
Δs/Δt = 45 m/10 s = 4,5 m/s = 16,2 km/h
An der Marke D steht das Schiff relativ zum Wasser, d. h. die Strömung beträgt ca. 5 km/h.
Bild 1 Ablauf des Stoppmanövers

Bezeichnungen in Bild 1:
| A | Kommando "Stopp" |
| B | Propeller steht |
| C | Propeller dreht rückwärts |
| D | v = 0 gegen Wasser |
| E | v = 0 gegen Land |
| v | Schiffsgeschwindigkeit |
| vL | v gegen Land |
| s | gemessener Weg gegen Land |
| T | gemessene Zeit |
| Untersuchungskommission: ..................... | Art des Schiffes oder Verbandes: .................... | Strecke: ......................................... |
| Datum: ..................................................... | L x B [m]: ........................................................ | Pegel [m]: ........................................ |
| Name: ...................................................... | TVersuch[m]: ...................................................... | Wassertiefe [m]: ........................................ |
| Fahrt Nr.: ................................................. | Beladung (beim Versuch) [t]: .......................... | Gefälle [m/km]: ........................................ |
| % der maximalen Tragfähigkeit: ..................... | vSTR
[km/h]: ........................................ [m/s]: ......................................... | |
| Motorische Antriebsleistung PB [kW]: ............ | Maximale Verdrängung [m3]: | |
| Antriebssystem nach Anlage 2, Tabelle 2: ........ |
Tabelle 1: Messprotokoll Stoppmanöver
| Ort s [Strom-km] | Zeit [sek.] | Δs [m] | Δt [sek.] | vIL [km/h] | Drehzahl n [min-1] [min-1] | Bemerkungen |
| Bewertung der Ergebnisse des Stoppmanövers | Anlage 2 zur Dienstanweisung Nr. 2 |
1. Anhand der aufgenommenen Messwerte nach Anlage 1 zur Dienstanweisung Nr. 2 ist die Einhaltung der Grenzwerte festzustellen.
Weichen die Bedingungen während des Stoppmanövers wesentlich von den festgelegten Normbedingungen ab oder bestehen Zweifel an der Einhaltung der Grenzwerte, so sind die Messergebnisse zu bewerten.
Hierzu kann das nachfolgend beschriebene Verfahren zur Berechnung von Stoppmanövern angewandt werden.
2. Die theoretischen Stoppwege bei Normbedingungen gemäß Nummer 2.1 der Dienstanweisung Nr. 2 (sSOLL) und bei den Bedingungen während des Stoppmanövers (sIST) werden berechnet und mit dem gemessenen Stoppweg (sMESSUNG) in Beziehung gebracht. Der korrigierte Stoppweg des Stoppmanövers bei Normbedingungen (SNORM) ergibt sich wie folgt:
Formel 2.1 sNORM = sMESSUNG ⋅ (sSOLL/sIST) < jeweiliger Grenzwert gemäß Nummer 2.1 Buchstabe a oder b der Dienstanweisung Nr. 2.
Wurde das Stoppmanöver mit einer Beladung von 70 - 100 % der maximalen Tragfähigkeit nach Nummer 2.2 der Dienstanweisung Nr. 2 durchgeführt, ist für die Ermittlung von sNORM bei der Berechnung von sSOLL und von sIST die Wasserverdrängung (DSOLL = DIST) einzusetzen, die der beim Versuch vorhandenen Beladung entspricht.
Ergibt die Ermittlung von sNORM gemäß Formel 2.1, dass der jeweilige Grenzwert über- oder unterschritten wird, so ist durch Variation von DSOLL der Wert von sSOLL soweit zu vermindern oder zu vergrößern, dass der Grenzwert gerade eingehalten wird (sNORM = jeweiliger Grenzwert). Die höchste in der Talfahrt zugelassene Verdrängung ist danach festzulegen.
3. Entsprechend der nach Nummer 2.1 Buchstabe a und b der Dienstanweisung Nr. 2 festgelegten Grenzwerte sind nur die Stoppwege
zu berechnen (siehe Bild 1). Der Gesamtstoppweg ergibt sich dann zu
Formel 3.1 sges = sI+ sII
4. Die einzelnen Stoppwege werden wie folgt berechnet:
Berechnung von Stoppmanövern
Bild 2: Schaubild

| Berechnungsformeln: | mit folgenden Koeffizienten | |
| 4.1 | sI = k1 ⋅vL ⋅tI .............. tI < 20 s | - k1 aus Tabelle 1 |
| 4.2 |  | - k2, k3, k4 aus Tabelle 1 |
| 4.3 |  | - k6, k7 aus Tabelle 1
- RT/v2 aus Tabelle 3 |
| 4.4 | RG = i ⋅ D × ρ ⋅g ⋅ 10-6 | |
| 4.5 | νII = k6 ⋅ (νL - νSTR) | - k6 aus Tabelle 1 |
| 4.6 | FPOR = ƒ ⋅ PB | - f aus Tabelle 2 |
| 4.7 |  | - k4 aus Tabelle 1 |
In den Formeln 4.1 bis 4.7 bedeuten:
| νL | Geschwindigkeit gegen Land bei Beginn des Umsteuerns | (m/s) |
| tI | Umsteuerzeit | (s) |
| νII | Geschwindigkeit relativ zum Wasser bei Abschluss des Umsteuerns | (m/s) |
| D | Wasserverdrängung | (m3) |
| FPOR | Pfahlzugkraft rückwärts | (kN) |
| PB | Motorische Antriebsleistung | (kW) |
| RTmII | mittlerer Widerstand während Phase II, festzustellen an Hand des Diagramms zur Ermittlung von RT/v2 | (kN) |
| RG | Gefällewiderstand | (kN) |
| i | Gefälle (bei fehlender Angabe = 0,16) | (m/km) |
| νSTR | mittlere Strömungsgeschwindigkeit | (m/s) |
| g | Erdbeschleunigung (9,81) | (m/s2) |
| ρ | Dichte des Wassers, p Frischwasser = 1 000 | (kg/m3) |
| T | Tiefgang (des Schiffes oder Verbandes) | (m) |
| h | Wassertiefe | (m) |
| B | Breite | (m) |
| L | Länge | (m) |
Die Koeffizienten für die Formeln 4.1, 4.2, 4.3, 4.4, 4.5, 4.6 und 4.7 können den folgenden Tabellen entnommen werden:
Tabelle 1: k-Faktoren für
| a) | b) | c) | Dimension | |
| k1 | 0,95 | 0,95 | 0,95 | - |
| k2 | 0,115 | 0,120 | 0,125 | (kg ⋅ s2) / m4 |
| k3 | 1,20 | 1,15 | 1,10 | - |
| k4 | 0,48 | 0,48 | 0,48 | - |
| k6 | 0,90 | 0,85 | 0,80 | - |
| k7 | 0,58 | 0,55 | 0,52 | - |
Tabelle 2: Koeffizient f für das Verhältnis von Pfahlzugkraft rückwärts zur motorischen Antriebsleistung
| Antriebssystem | f | Dimension |
| Moderne Düsen mit abgerundeter Hinterkante | 0,118 | kN/kW |
| Ältere Düsen mit scharfer Hinterkante | 0,112 | kN/kW |
| Propeller ohne Düsen | 0,096 | kN/kW |
| Ruderpropeller mit Düsen (üblich: scharfe Hinterkante) | 0,157 | kN/kW |
| Ruderpropeller ohne Düsen | 0,113 | kN/kW |
Tabelle 3: Diagramm zur Ermittlung von R T/v2 in Abhängigkeit von D1/3 (B + 2T)

| Beispiele zur Anwendung der Anlage 2 (Bewertung der Ergebnisse des Stoppmanövers) | Anhang zur Anlage 2 der Dienstanweisung Nr. 2 |
1. Daten des Verbandes und seiner Fahrzeuge
Formation:
Gütermotorschiff mit einem seitlich gekuppelten Schubleichter (Europa IIa)
| L [m] | B [m] | Tmax [m] | Tgf *max [t] | Dmax [m3] | PB [kW] | |
| GMS | 110,0 | 11,4 | 3,5 | 2.900 | 3.731 | 1.500 |
| SL | 76,5 | 11,4 | 3,7 | 2.600 | 2.743 | - |
| Verband | 110,0 | 22,8 | 3,7 | 5.500 | 6.474 | 1.500 |
| *) Tgf = Tragfähigkeit | ||||||
GMS-Antriebssystem: Moderne Düsen mit abgerundeter Hinterkante
2. Messwerte aus Stoppmanöver
| Strömungsgeschwindigkeit: | νSTRIST | = | 1,4 m/s | ≈5,1 km/h |
| Schiffsgeschwindigkeit (gegen Wasser): | νSIST | = | 3,5 m/s | ≈12,5 km/h |
| Schiffsgeschwindigkeit (gegen Land): | νLIST | = | 4,9 m/s | ≈17,6 km/h |
| Umsteuerzeit (gemessen) (Punkt A bis C): | tI | = | 16 s | |
| Stoppweg gegen Wasser (Punkt A bis D): | sMESSUNG | = | 340 m | |
| aus Beladungszustand (ggf. Abschätzung): | DIST | = | 5.179 m3 | ≈0,8 Dmax |
| vorhandener Tiefgang des Verbands: | TIST | = | 2,96 m | ≈0,8 Tmax |
3. Grenzwert nach Nummer 2.1 Buchstabe a oder b zum Vergleich mit SNORM
Da B > 11,45 m und da sich der Verband in strömendem Gewässer befindet, gilt für ihn gemäß Nummer 2.1 Buchstabe a:
sNORM < 550 m
4. Ermittlung des korrigierten Stoppweges bei Normbedingungen
sIST aus der Summe von
| sIIST | (nach Formel 4.1 der Anlage 2 mit vLIST) |
| und sIIIST | (nach den Formeln 4.2, 4.3, 4.4, 4.5 und 4.6 der Anlage 2 mit vIIIST, vSTRIST, DIST) |
| sSOLL aus der Summe von | |
| sISOLL | (nach Formel 4.1 der Anlage 2 mit vLSOLL) |
| und sIISOLL | (nach den Formeln 4.2 bis 4.6 der Anlage 2 mit den Soll-Geschwindigkeiten nach Nummer 2.1 der Dienstanweisung Nr. 2; da die Beladung über 70 % des maximalen Beladungszustandes beträgt (≈80 %), gilt außerdem: DSOLL = DIST und TSOLL = TIST) |
zu prüfen:
sNORM = sMESSUNG⋅ (sSOLL/sIST) < 550 m
4.1 Koeffizienten für die Berechnung aus Anlage 2
| für sIIST und sISOLL | k1 = 0,95 |
| für sIIIST und sIISOLL | k2 = 0,12 |
| k3 = 1,15 | |
| k4 = 0,48 | |
| k6 = 0,85 | |
| k7 = 0,55 |
Tabelle 2 (für moderne Düse mit abgerundeter Hinterkante)
f = 0,118
4.2 Berechnung von sIST




Anmerkung: Da die von D abhängige Größe (RTmII - RG) mit 20,67 kN offensichtlich relativ gering gegenüber k3 ⋅FPOR mit 203,55 kN ist, kann vereinfachend sII proportional D, d. h. sII = Konst ⋅ D angesetzt werden.
4.3 Berechnung von sSOLL
Ausgangswerte:
νSTRSOLL = 1,5 m/s = 5,4 km/h DSOLL = DIST = 5.179 m3
νSSOLL = 3,6 m/s = 13 km/h TSOLL = TIST = 2,96 m
νLSOLL = 5,1 m/s = 18,4 km/h

 wie unter 4.2 weil B, D, T unverändert
wie unter 4.2 weil B, D, T unverändert

4.4 Prüfung auf Einhaltung des zulässigen Stoppweges bei Normbedingungen sNORM nach Formel 2.1 der Anlage 2
sNORM = sMESSUNG⋅ (sSOLL/sIST) = 340 ⋅ (322/303,4) = 360,8 m < 550 m
Beurteilung:
Zulässiger Grenzwert wird deutlich unterschritten, d. h.
5. Mögliche Vergrößerung von DIST in der Talfahrt

Mit sIISOLL = KonstSOLL ⋅ D gemäß Anmerkung unter 4.2 ergibt sich:
(sSOLL)Grenze = (sISOLL+ sIISOLL)Grenze = sISOLL + 0,0472 ⋅(DSOLL)Grenze
daraus folgt:

Folgerung:
Da (DSOLL)Grenze > Dmax (8.756 > 6.474) des Verbandes kann diese Formation (siehe 1) für die volle Abladung in der Talfahrt zugelassen werden.
1. Daten des Verbandes und seiner Fahrzeuge
Formation:
Großmotorschiff schiebend mit
2 Leichtern voraus und
1 Leichter seitlich gekuppelt.
| L [m] | B [m] | Tmax [m] | Tgf *max [t] | Dmax [m3] | PB [kW] | |
| GMS | 110,0 | 11,4 | 3,5 | 2.900 | 3.731 | 1.500 |
| je SL | 76,5 | 11,4 | 3,7 | 2.600 | 2.743 | - |
| Verband | 186,5 | 22,8 | 3,7 | 10.700 | 11.960 | 1.500 |
| *) Tgf = Tragfähigkeit | ||||||
GMS-Antriebssystem: Moderne Düsen mit abgerundeter Hinterkante
2. Messwerte aus Stoppmanöver
| Strömungsgeschwindigkeit: | νSTRIST = 1,4 m / s ≈ 5,1 km / h |
| Schiffsgeschwindigkeit (gegen Wasser): | νSIST = 3,5 m / s ≈ 12,5 km / h |
| Schiffsgeschwindigkeit (gegen Land): | νLIST = 4,9 m / s ≈17,6 km / h |
| Umsteuerzeit (gemessen) (Punkt A bis C): | tI = 16 sec |
| Stoppweg gegen Wasser (Punkt A bis D): | sMESSUNG = 580 m |
| aus Beladungszustand (ggf. Abschätzung): | DIST = 9.568 m3 ≈0,8 Dmax |
| vorhandener Tiefgang des Verbands: | TIST = 2,96 ≈0,8 Tmax |
3. Grenzwert gemäß Nummer 2.1 Buchstabe a oder b der Dienstanweisung zum Vergleich mit sNORM
Da B > 11,45 m und da sich der Verband in strömendem Gewässer befindet, gilt für ihn gemäß Nummer 2.1 Buchstabe a der Dienstanweisung Nr. 2:
sNORM < 550 m
4. Ermittlung des korrigierten Stoppweges bei Normbedingungen
| sIIST | (nach Formel 4.1 der Anlage 2 mit vLIST) |
| und sIIIST | (nach den Formeln 4.2 bis 4.6 der Anlage 2 mit Ist-Geschwindigkeit vLIST (siehe Nr. 2) und DIST) |
| sSOLL: sum sISOLL + sIISOLL | (nach den Formeln 4.1 bis 4.6 der Anlage 2 mit den Soll-Geschwindigkeiten nach Anlage 2; da die Beladung > 70 % des maximalen Beladungszustandes beträgt, gilt: DSOLL = DIST und TSOLL = TIST) |
4.1 Koeffizienten für die Berechnung gemäß Anlage 2
| für sIIST und sISOLL | k1 = 0,95 |
| für sIIST und sIISOLL | k2 = 0,12 |
| k3 = 1,15 | |
| k4 = 0,48 | |
| k5 = 0,85 | |
| k7 = 0,55 |
Tabelle 2 (für moderne Düse mit abgerundeter Hinterkante)
ƒ= 0,118
4.2 Berechnung von sIIST




4.3 Berechnung von sSOLL
Ausgangswerte:
| νSTRSOLL = 1,5 m/s ≈5,4 km/h | DSOLL = DIST = 9.568 m3 |
| νSSOLL = 3,6 m/s ≈ 13 km/h | TSOLL = TIST = 2,96 m |
| νLSOLL = 5,1 m/s ≈ 18,4 km/h |

 wie unter 4.2 weil B, D, T unverändert
wie unter 4.2 weil B, D, T unverändert
4.4 Prüfung auf Einhaltung des zulässigen Stoppweges bei Normbedingungen sNORM nach Formel 2.1 der Anlage 2
sNORM = sMESSUNG ⋅ (sSOLL/sIST) = 580 ⋅ (525,5/475) = 641 m > 550 m
Beurteilung: Zulässiger Grenzwert wird deutlich überschritten, daher Zulassung für die Talfahrt nur mit verminderter Zuladung möglich, die gemäß Nummer 5 ermittelt werden kann.
5. Zulässige D* in der Talfahrt nach Formel 2.1 der Anlage 2
sNORM = sMESSUNG ⋅ (s*SOLL/sIST) = 550 m
Daraus folgt:
s
Folgerung:
Da die in der Talfahrt zulässige Verdrängung D* nur 7.950 m3 beträgt, ist näherungsweise
Zulässige Tragfähigkeit ist in dieser Formation (siehe 1)
0,66 ⋅10.700 = 7.112 t
| weiter . | |