
 Für einen individuellen Ausdruck passen Sie bitte die Für einen individuellen Ausdruck passen Sie bitte dieEinstellungen in der Druckvorschau Ihres Browsers an. ▢ Regelwerk, Gefahrgut/Transport / See /MSC |
Entschließung MSC.415(97)
Änderungen des Teils B des Internationalen Codes über Intaktstabilität von 2008 (IS-Code 2008)
Vom 21. Juni 2017
(VkBl. Nr. 13 vom 15.07.2017 S. 609)
Az.: 11-3-0
Siehe Fn. *
(angenommen am 25. November 2016)
Der Schiffssicherheitsausschuss -
gestützt auf Artikel 28 Buchstabe b des Übereinkommens über die internationale Seeschifffahrtsorganisation betreffend die Aufgaben des Ausschusses,
ferner gestützt auf Entschließung MSC.267(85), mit welcher er den Internationalen Code über Intaktstabilität von 2008 ("IS-Code 2008") beschlossen hat,
im Hinblick auf die Bestimmungen hinsichtlich des Verfahrens für Änderungen des Teils B des IS-Codes 2008, festgelegt in Absatz 27.2 der Regel II-1/2 des Internationalen Übereinkommens von 1974 zum Schutz des menschlichen Lebens auf See ("das SOLAS-Übereinkommen") in der durch Entschließung MSC.269(85) geänderten Fassung, und in Absatz (16).2 der Regel I/3 des Protokolls von 1988 zu dem Internationalen Freibord-Übereinkommen von 1966 ("Freibord-Protokoll von 1988"), in der durch Entschließung MSC. 270(85) geänderten Fassung,
in Anbetracht der Notwendigkeit, Bestimmungen für Schiffe im Ankerzieh-, Hebe- und Schleppbetrieb, einschließlich Schlepperassistenz, in den IS-Code 2008 aufzunehmen,
nach der auf seiner siebenundneunzigsten Tagung erfolgten Prüfung der vom Unterausschuss für Schiffsentwurf und -konstruktion auf dessen zweiter Tagung ausgearbeiteten vorgeschlagenen Änderungen des Teils B des IS-Codes 2008,
- Beschließt Änderungen des Teils B des IS-Codes 2008, deren Wortlaut in der Anlage zu dieser Entschließung wiedergegeben ist;
- Empfiehlt betroffenen Regierungen, die Änderungen des Teils B des IS-Codes 2008 als eine Grundlage für einschlägige Sicherheitsnormen zu verwenden, sofern nicht deren nationale Sicherheitsanforderungen mindestens einen gleichwertigen Grad an Sicherheit bieten;
- Ersucht Vertragsregierungen des SOLAS-Übereinkommens und Parteien des Freibord-Protokolls von 1988 zur Kenntnis zu nehmen, dass die oben genannten Änderungen des IS-Codes 2008 am 1. Januar 2020 wirksam werden.
Änderungen des Teils B des IS-Codes 2008
1 Der Titel des Teils B wird durch den folgenden Wortlaut ersetzt:
| alt | neu |
| Teil B Empfehlungen für bestimmte Schiffstypen und zusätzliche Richtlinien | "Teil B Empfehlungen für Schiffe in bestimmten Betriebsarten, bestimmte Schiffstypen und zusätzliche Richtlinien" |
Kapitel 1 - Allgemeines
1.2 Anwendungsbereich
2 Ein neuer Absatz 1.2.2 wird wie folgt hinter dem bestehenden Absatz 1.2.1 eingefügt:
1.2.2 Bei der Bestimmung angemessener Stabilität können die hier enthaltenen Empfehlungen auch auf andere Schiffe angewendet werden, die ähnlichen äußeren Kräften ausgesetzt sind."
und die bestehenden Absätze 1.2.2 und 1.2.3 werden entsprechend umnummeriert.
Kapitel 2 - Empfohlene Baukriterien für bestimmte Schiffstypen
3 Der Titel des Kapitels 2 wird durch das Folgende ersetzt:
| alt | neu |
| Empfohlene Baukriterien für bestimmte Schiffstypen | "Empfohlene Baukriterien für Schiffe in bestimmten Betriebsarten und für bestimmte Schiffstypen" |
4 Absatz 2.4.3.4 wird durch das Folgende ersetzt:
| alt | neu |
| Fahrzeuge im Schleppbetrieb sollen mit einer Vorrichtung zum schnellen Lösen der Schlepptrosse ausgerüstet sein. | Ein Schiff im Schleppbetrieb muss mit einer Vorrichtung zum schnellen Slippen der Schleppleine ausgerüstet sein.* ____ *) Mit Schleppwindensystemen ausgerüstete Schiffe müssen ebenfalls mit einer Vorrichtung zum schnellen Slippen der Schleppleine ausgerüstet sein." |
5 Die folgenden neuen Abschnitte 2.7 bis 2.9 werden hinter dem bestehenden Abschnitt 2.6 hinzugefügt:
"2.7 Schiffe im Ankerziehbetrieb
2.7.1 Anwendungsbereich
2.7.1.1 Die nachfolgenden Vorschriften gelten für Schiffe im Ankerziehbetrieb.
2.7.1.2 Ein Draht bezeichnet eine Leine (Drahtseil, synthetisches Seil oder Kette), die zum Gebrauch beim Ziehen von Ankern mittels einer Ankerziehwinde bestimmt ist.
2.7.2 Krängende Hebelarme
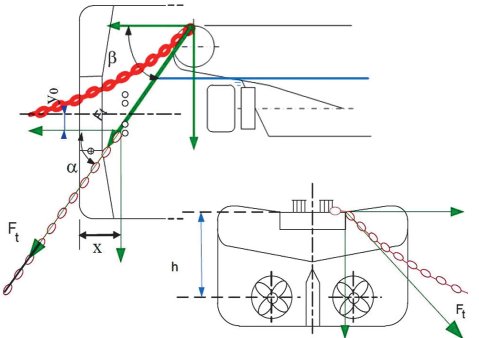
2.7.2.1 Ein krängender Hebelarm HLΦ, der durch die Wirkung eines von den lotrechten und waagerechten Komponenten einer auf den Draht wirkenden Zugkraft verursachten Krängungsmomentes erzeugt wird, muss wie folgt berechnet werden:
HLΦ = (MAH /Δ2) cos Φ
Dabei ist:
| MAH | = | Fp * (h sin α* cosβ + y * sinβ); |
| Δ2 | = | Verdrängung bei einem Ladefall, einschließlich der Einwirkung der hinzukommenden lotrecht wirkenden Lasten (Fv) in der Schiffslängsachse am Heck des Schiffes, |
| Fv | = | Fp * sin β: |
| α | = | oder nach außen positiv gemessene Winkel in der Horizontalebene zwischen der Schiffslängsachse und dem Vektor, in dem die Drahtzugkraft auf das aufrecht schwimmende Schiff einwirkt; |
| β | = | der nach unten positiv gemessene Winkel in der Vertikalebene zwischen der Wasserlinienebene und dem Vektor, in dem die Drahtzugkraft auf das aufrecht schwimmende Schiff einwirkt, der beim Winkel des größten Krängungsmoments unter Verwendung konsistenter Maßeinheiten mit tan-1(y / (h × sin α)), angesetzt werden muss, aber nicht kleiner angesetzt werden darf als cos-1 (1, 5 BP / (FP cos α)); |
Abbildung 2.7-1: Schaubilder zur Darstellung der Bedeutung der Parameter α, β, x, y und h. Ft zeigt den Vektor der einwirkenden Drahtzugkraft.
| BP | = | der Pfahlzug, der dem dokumentierten größten kontinuierlichen Zug entspricht, der bei einem statischen Zugversuch bei der Seeerprobung gemäß Anlage A des Rundschreibens MSC/Circ.884 oder gemäß einer gleichwertigen, für die Verwaltung akzeptierbaren Norm ermittelt wurde; |
| Fp | = | (Zulässige Zugkraft) die Drahtzugkraft, die auf das Schiff in seinem Beladungszustand bei Führung des Drahtes durch ein bestimmtes Schlepp-Pfostenpaar einwirken kann bei jedem α, bei dem alle Stabilitätskriterien erfüllt werden können. Fp darf unter keinen Umständen größer als Fd angesetzt werden; |
| Fd | = | (die auslegungsgemäß größte Zugkraft im Draht) die größte Zugkraft der Schleppwinde oder die größte statische Haltekraft der Windenbremse, je nachdem welche Kraft größer ist; |
| h | = | der senkrechte Abstand (m) zwischen der Wirkungslinie, in der die Antriebskraft auf das Schiff wirkt und entweder: |
| ||
| y | = | Der Abstand in Querschiffsrichtung(m) zwischen der Schiffslängsachse und dem äußeren Punkt, an dem die Drahtzugkraft in das Schiff eingeleitet wird, gegeben durch:
y0 + x tan α; aber nicht größer als B/2; |
| B | = | die Breite auf Spanten (m); |
| y0 | = | Der Abstand in Querschiffsrichtung (m) zwischen der Schiffslängsachse und dem inneren Teil des Schlepp-Pfostens oder jeglicher mechanischen Begrenzung der Bewegung des Drahtes in Querschiffsrichtung; |
| x | = | der Abstand in Schiffslängsrichtung (m) zwischen dem Heck und dem Schlepp-Pfosten oder jeglicher mechanischen Begrenzung der Bewegung des Drahtes in Querschiffsrichtung. |
2.7.3 Zulässige Zugkraft
2.7.3.1 Die zulässige Zugkraft als Funktion des in Absatz 2.7.2 definierten α darf nicht größer sein als die durch Absatz 2.7.3.2 vorgegebene Zugkraft,
2.7.3.2 Zulässige Zugkraft als Funktion von α kann durch direkte Stabilitätsberechnungen berechnet werden, sofern die folgenden Voraussetzungen erfüllt sind:
- der krängende Hebelarm muss für jeden Winkel α so angenommen werden, wie in Absatz 2.7.2 festgelegt;
- die Stabilitätskriterien im Absatz 2.7.4 müssen eingehalten werden;
- α darf, abgesehen von der durch Absatz 2.7.3.3 gestatteten Ausnahme, nicht kleiner als 5 Grad angesetzt werden; und
- α muss in Schritten von höchstens 5 Grad angegeben werden, mit der Ausnahme, dass größere Schritte akzeptiert werden können, sofern die zulässige Zugkraft durch das Bilden von Arbeitssektoren auf die größeren α beschränkt ist.
2.7.3.3 Für den Fall eines geplanten Einsatzes zur Bergung eines festgekommenen Ankers, bei dem das Schiff über dem Anker positioniert ist und geringe oder keine Fahrt macht, darf für α ein geringerer Wert als 5 Grad angesetzt werden.
2.7.4 Stabilitätskriterien
2.7.4.1 Für die Ladefälle, bei denen Ankerziehen vorgesehen ist, aber noch nicht begonnen hat, müssen die in Absatz 2.2 von Teil A vorgegebenen Stabilitätskriterien eingehalten werden, oder, sofern die Merkmale eines Schiffes deren Einhaltung unmöglich machen, die in Absatz 2.4 von Teil B vorgegebenen gleichwertigen Stabilitätskriterien. Während des Ankerziehbetriebes, bei Einwirkung des Krängungsmomentes, müssen die Kriterien gemäß den Absätzen 2.7.4.2 bis 2.7.4.4 eingehalten werden.
2.7.4.2 Die Restfläche zwischen der Kurve der aufrichtenden Hebelarme und der Kurve der gemäß Absatz 2.7.2 berechneten krängenden Hebelarme muss mindestens 0,070 m x Radiant betragen. Die Bestimmung der Fläche erfolgt vom ersten Schnittpunkt der beiden Kurven, Φe, bis zum Winkel des zweiten Schnittpunkts, Φc, oder bis zum Einströmwinkel, Φf, je nachdem welcher Winkel kleiner ist.
2.7.4.3 Der größte zwischen der Kurve der aufrichtenden Hebelarme und der Kurve der gemäß Absatz 2.7.2 berechneten krängenden Hebelarme verbleibende aufrichtende Hebelarm GZ muss mindestens 0,2 m betragen.
2.7.4.4 Der statische Winkel, Φe, beim ersten Schnittpunkt der Kurve der aufrichtenden Hebelarme mit der Kurve der gemäß Absatz 2.7.2 berechneten krängenden Hebelarme darf nicht größer sein als:
- der Winkel, bei dem der aufrichtende Hebelarm 50 v. H. seines Höchstwertes entspricht;
- oder der Winkel, bei dem das Deck eintaucht;
- oder 15°,
je nachdem welcher Winkel der kleinste ist.
2.7.4.5 Bei allen Betriebsbedingungen muss bei einer vorgegebenen, gemäß Absatz 2.7.2. definierten Verdrängung Δ2 am Heck in der Schiffslängsachse ein Mindestfreibord von mindestens 0,005 L eingehalten werden. In dem Fall des durch Absatz 2.7.3.3 behandelten Einsatzes zur Ankerbergung kann ein geringerer Mindestfreibord akzeptiert werden, sofern dem im Einsatzplan gebührend Rechnung getragen wurde.
2.7.5 Bauliche Vorkehrungen gegen Kentern
2.7.5.1 Ein Stabilitätsrechner darf zur Bestimmung der zulässigen Zugkräfte und zur Überprüfung der Einhaltung maßgeblicher Stabilitätskriterien verwendet werden.
Zwei Arten von Stabilitätsrechnern dürfen an Bord benutzt werden:
- entweder eine Software zur Überprüfung der vorgesehenen oder tatsächlichen Zugkraft auf der Grundlage der Kurven der zulässigen Zugkräfte; oder
- eine Software zur Durchführung direkter Stabilitätsberechnungen, um die Einhaltung der maßgeblichen Kriterien für einen gegebenen Ladefall (vor der Einwirkung der Zugkraft), eine gegebene Zugkraft und einen (durch die Winkel α und β definierten) gegebenen Drahtverlauf zu überprüfen.
2.7.5.2 Zugang zum Maschinenraum, ausgenommen Notzugang und Montageluken, muss möglichst innerhalb der Back angeordnet sein. Jeder Zugang vom freiliegenden Ladungsdeck zum Maschinenraum muss mit zwei wetterdichten Verschlüssen versehen sein. Räume unter dem freiliegenden Ladungsdeck müssen vorzugsweise von einer Position innerhalb oder oberhalb des Aufbaudecks aus zugänglich sein.
2.7.5.3 Der Querschnitt der Wasserpforten in den Schanzkleidern an den Seiten des Ladungsdecks muss, je nach Anwendbarkeit, mindestens den Anforderungen der Regel 24 des Internationalen Freibord-Übereinkommens von 1966 oder des Protokolls von 1988 zu dem Internationalen Freibord-Übereinkommen von 1966 in seiner geänderten Fassung entsprechen. Die Anordnung der Wasserpforten muss sorgfältig erwogen werden, um sicherzustellen, dass Wasser, das sich auf dem Arbeitsdeck und in Nischen im Backendschott angesammelt hat, am effektivsten abläuft. Auf Schiffen, die in Gebieten betrieben werden, in denen mit Vereisung zu rechnen ist, dürfen die Wasserpforten nicht mit Klappen versehen sein.
2.7.5.4 Die Windensysteme müssen mit einer Notslippvorrichtung ausgerüstet sein.
2.7.5.5 Für Schiffe im Ankerziehbetrieb müssen die folgenden Empfehlungen für die Einrichtungen zum Ankerziehen berücksichtigt werden:
- Es müssen Begrenzungspfosten oder sonstige konstruktive Lösungen eingebaut werden, die dazu bestimmt sind, ein weiteres Auswandern des Drahtes nach außen zu verhindern; und
- das Arbeitsdeck muss mit kontrastierenden Farben oder anderen Kennzeichnungen, wie z.B. Leitpfosten, Begrenzungspfosten oder ähnlich leicht identifizierbaren Punkten markiert werden, die die Betriebsbereiche für die Schleppleine kennzeichnen, um der Bedienperson bei der Überwachung zu helfen.
2.7.6 Betriebliche Vorkehrungen gegen Kentern
2.7.6.1 Für jeden Ankerziehbetrieb muss ein umfassender Einsatzplan gemäß den in Absatz 3.8 gegebenen Richtlinien festgelegt werden, in dem mindestens, aber nicht ausschließlich, die folgenden Verfahren und Notfallmaßnahmen festgelegt werden müssen:
- Umweltbedingungen für den Betrieb;
- Windenbetrieb und Verschiebungen von Gewichten;
- Einhaltung der Stabilitätskriterien für die verschiedenen erwarteten Ladefälle;
- zulässige Zugkräfte an den Winden als Funktion von a gemäß Absatz 3.8;
- Verfahren für den Abbruch der Arbeit und für Korrekturen; sowie
- Bekräftigung der Verpflichtung des Kapitäns, wenn nötig Korrekturmaßnahmen zu ergreifen.
2.7.6.2 An Deck gestaute Ladung muss so angeordnet werden, dass ein Blockieren der Wasserpforten oder ein plötzliches Verrutschen der Ladung an Deck vermieden wird.
2.7.6.3 Gegenballasten zum Ausgleich der Krängung des Schiffes während des Ankerziehbetriebes muss vermieden werden.
2.8 Schiffe im Schlepp- und im Assistenzbetrieb
2.8.1 Anwendungsbereich
Die nachfolgenden Vorschriften gelten für Schiffe im Hafenschleppbetrieb, im Küsten- oder Hochseeschleppbetrieb und im Assistenzbetrieb, deren Kiel am oder nach dem 1. Januar 2020 gelegt wird oder die sich zu diesem Zeitpunkt in einem entsprechenden Bauzustand * befinden, sowie für Schiffe, die nach diesem Zeitpunkt für den Einsatz im Schleppbetrieb umgebaut werden.
____
*) Entsprechender Bauzustand bezeichnet den Zustand:
- der den Baubeginn eines bestimmten Schiffes erkennen lässt; und
- in dem die Montage von mindestens 50 Tonnen oder 1 v. H. des geschätzten Gesamtbedarfs an Baumaterial begonnen hat, je nachdem welcher Wert kleiner ist.
2.8.2 Der krängende Hebelarm beim Schleppbetrieb
2.8.2.1 Der krängende Hebelarm, bei dem sich die Schleppleine selbsttätig ausklinken muss, wird berechnet wie im Folgenden vorgegeben:
- Ein querschiffs wirkendes Krängungsmoment wird erzeugt durch den größten vom Antrieb und von den Steuersystemen des Schiffes ausgeübten Querschub und den entsprechenden, entgegengerichteten Zug in der Schleppleine.
- Der krängende Hebelarm HLΦ, in (m), als eine Funktion des Krängungswinkels Φ, muss gemäß folgender Formel berechnet werden:
HLΦ = BP * CT * (h * cosΦ - r * sinΦ) / g *Δ
Dabei ist:
| BP | = | Pfahlzug, in (kN), der der größten nachgewiesenen Dauerzugkraft entspricht, die in einem gemäß den einschlägigen IMO-Richtlinien * oder in einem gemäß einer für die Verwaltung akzeptierbaren Norm durchgeführten statischen Pfahlzugversuch erreicht wurde; ______ *) Verwiesen wird auf Anlage A zu den Guidelines for safe ocean towing (MSC/Circ.884). |
| CT | = |
|
| Für Schlepper mit anderer Auslegung der Antriebs- und/oder Schleppeinrichtungen muss der Wert von CT für jeden Einzelfall gemäß den Anforderungen der Verwaltung festgesetzt werden. | ||
| Δ | = | Verdrängung, in (t); |
| l | = | Abstand in Schiffslängsrichtung, in (m), zwischen dem Angriffspunkt der Schleppleine und der vertikalen Drehachse der Antriebseinheiten) bei der jeweils betrachteten Schleppsituation; |
| h | = | lotrechter Abstand, in (m), zwischen dem Angriffspunkt der Schleppleine und der horizontalen Drehachse der Antriebseinheiten) bei der jeweils betrachteten Schleppsituation, |
| g | = | mit 9,81 anzusetzende Erdbeschleunigung, in (m/s2); |
| r | = | der Abstand in Querschiffsrichtung zwischen der Schiffslängsachse und dem Angriffspunkt der Schleppleine, in (m). r ist mit Null anzusetzen, wenn der Angriffspunkt der Schleppleine in der Schiffslängsachse liegt. |
| LLL | = | Länge (L) gemäß der Begriffsbestimmung im in Kraft befindlichen Internationalen Freibordübereinkommen. |
Der Angriffspunkt der Schleppleine ist der Ort, an dem die Zugkraft der Schleppleine in das Schiff eingeleitet wird. Der Angriffspunkt der Schleppleine kann ein Schlepphaken, ein Schleppblock, eine Klüse oder ein gleichwertiger, diesem Zweck dienender Ausrüstungsgegenstand sein.
2.8.2.2 Der krängende Hebelarm HLΦ in (m), bei dem der Schleppanhang ausgeklinkt werden muss, wird gemäß der folgenden Formel berechnet:

Dabei ist:
| C1 | = | Seitenkraftkoeffizient |
| = |  | |
| C2 | = | Berichtigung von C1 für Krängungswinkel |
| = | 
Winkel bis Seite Deck
| |
| C3 | = | Abstand zwischen dem Flächenschwerpunkt von AP und der Wasserlinie als Bruchteil des Tiefgangs bezogen auf den Krängungswinkel |
| = | ||
| y | = | spezifisches Gewicht von Wasser, in (t/m3); |
| V | = | seitliche Geschwindigkeit, in (m/s), V ist mit 2,57 (5 Knoten) anzusetzen; |
| AP | = | projizierte Lateralfläche des Unterwasserschiffes, in (m2), |
| r | = | der Abstand in Querschiffsrichtung zwischen der Schiffslängsachse und dem Angriffspunkt der Schleppleine, in (m), r ist mit Null anzusetzen, wenn der Angriffspunkt der Schleppleine in der Schiffslängsachse liegt; |
| LS | = | der Abstand in Längsschiffsrichtung, in (m), vom hinteren Lot bis zum Angriffspunkt der Schleppleine; |
| LPP | = | die Länge zwischen den Loten, in (m); |
| Φ | = | Krängungswinkel; |
| f | = | Freibord mittschiffs, in (m); |
| B | = | Breite auf Spanten, in (m); |
| h | = | senkrechter Abstand von der Wasserlinie bis zum Angriffspunkt der Schleppleine, in (m); |
| d | = | tatsächlicher mittlerer Tiefgang, in (m). |
Der Angriffspunkt der Schleppleine ist der Ort, an dem die Zugkraft der Schleppleine in das Schiff eingeleitet wird. Der Angriffspunkt der Schleppleine kann ein Schlepphaken, ein Schleppblock, eine Klüse oder ein gleichwertiger, diesem Zweck dienender Ausrüstungsgegenstand sein.
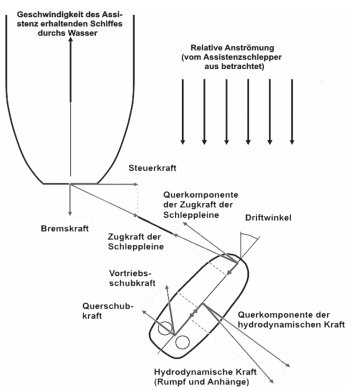
2.8.3 Der krängende Hebelarm beim Assistenzbetrieb
2.8.3.1 Für die Ermittlung der Stabilitätswerte während des Assistenzbetriebes wird das Schiff als in einem Gleichgewichtszustand befindlich betrachtet, der durch das Zusammenwirken der auf den Schiffskörper und die Anhänge wirkenden hydrodynamischen Kräfte, der Schubkraft und der Zugkraft der Schleppleine bestimmt wird, wie in Abbildung 2.8-1 dargestellt.
2.8.3.2 Für jeden Gleichgewichtszustand sind die zugehörigen Werte der Steuerkraft, der Bremskraft, des Krängungswinkels und des krängenden Hebelarms den Ergebnissen von Versuchen mit der Großausführung oder mit einem Modell oder numerischen Simulationen gemäß einer für die Verwaltung akzeptierbaren Methode zu entnehmen.
2.8.3.3 Für jeden maßgeblichen Ladefall ist die Ermittlung der Gleichgewichtszustände über die Bandbreite der auftretenden Assistenzgeschwindigkeiten vorzunehmen, wobei die Geschwindigkeit des Assistenz erhaltenden Schiffes durchs Wasser zu berücksichtigen ist.*
______
*) Die Bandbreite der üblichen Assistenzgeschwindigkeiten liegt zwischen 6 und 10 Knoten.
2.8.3.4 Für jede relevante Kombination von Ladefall und Assistenzgeschwindigkeit ist der größte krängende Hebelarm für die Bewertung der Stabilitätswerte zu verwenden.
2.8.3.5 Bei den Stabilitätsberechnungen ist der krängende Hebelarm als konstant anzusetzen.
Abbildung 2.8-1: Gleichgewichtszustand eines Assistenzschleppers
2.8.4 Stabilitätskriterien
2.8.4.1 Zusätzlich zu den in Teil A, Abschnitt 2.2 vorgegebenen Stabilitätskriterien oder den in Kapitel 4 der "Erläuterungen zum internationalen Code über Intaktstabilität aller Schiffstypen von 2008" vorgegebenen gleichwertigen Stabilitätskriterien müssen dann, wenn die Merkmale des Schiffes die Einhaltung von Teil A, Abschnitt 2.2 unmöglich machen, die folgenden Stabilitätskriterien erfüllt werden:
2.8.4.2 Für Schiffe im Hafen-, Küsten- oder Hochseeschleppbetrieb muss die Fläche A zwischen der Kurve der aufrichtenden Hebelarme und der Kurve der gemäß Absatz 2.8.2.1 (Selbstausklinken) berechneten krängenden Hebelarme, gemessen vom Krängungswinkel, Φe, bis zum Winkel des zweiten Schnittpunkts, Φc, oder bis zum Einströmwinkel Φf, je nachdem welcher Winkel kleiner ist, größer sein als die zwischen der Kurve der krängenden Hebelarme und der Kurve der aufrichtenden Hebelarme eingeschlossene Fläche B, gemessen vom Krängungswinkel Φ = 0 bis zum Krängungswinkel, Φe.
Dabei ist:
| Φe | = | Winkel des ersten Schnittpunkts der Kurve der krängenden Hebelarme mit der Kurve der aufrichtenden Hebelarme; |
| Φf | = | Einströmwinkel, wie er in Teil A, Absatz 2.3.1.4 dieses Codes definiert ist. Öffnungen, die gemäß dem Internationalen Freibordübereinkommen mit wetterdichten Verschlüssen versehen sein müssen, aber aus betrieblichen Gründen offen bleiben müssen, müssen als Einströmpunkte in der Stabilitätsberechnung berücksichtigt werden; |
| Φc | = | Winkel des zweiten Schnittpunkts der Kurven der krängenden Hebelarme und der aufrichtenden Hebelarme. |
2.8.4.3 Für Schiffe im Hafen-, Küsten- oder Hochseeschleppbetrieb muss der erste Schnittpunkt der Kurve der aufrichtenden Hebelarme mit der Kurve der gemäß Absatz 2.8.2.2 (Ausklinken des Schleppanhangs) berechneten krängenden Hebelarme bei einem Krängungswinkel erreicht werden, der kleiner ist als der Einströmwinkel, Φf.
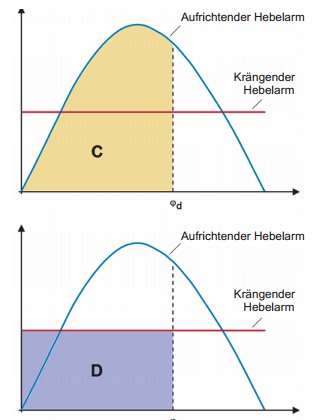
2.8.4.4 Für Schiffe im Assistenzbetrieb muss der gemäß Absatz 2.8.3 bestimmte größte krängende Hebelarm die folgenden Kriterien erfüllen:
- Fläche A > 1,25 x Fläche B;
- Fläche C > 1,40 x Fläche D; und
- Φe < 15 Grad.
Dabei ist:
| Fläche A | = | Fläche unter der Kurve der aufrichtenden Hebelarme, gemessen vom Krängungswinkel Φe bis zu einem Krängungswinkel von 20 Grad (siehe Abbildung 2.8-2); |
| Fläche B | = | Fläche unter der Kurve der krängenden Hebelarme, gemessen vom Krängungswinkel Φe bis zu einem Krängungswinkel von 20 Grad (siehe Abbildung 2.8-2); |
| Fläche C | = | Fläche unter der Kurve der aufrichtenden Hebelarme, gemessen von der aufrechten Schwimmlage (Φ = 0) bisΦd (siehe Abbildung 2.8-3); |
| Fläche D | = | Fläche unter der Kurve der krängenden Hebelarme, gemessen von der aufrechten Schwimmlage (Φ = 0) bis zum Krängungswinkel Φd (siehe Abbildung 2.8-3); |
| Φe | = | Krängungswinkel der Gleichgewichtslage, der beim ersten Schnittpunkt der Kurve der krängenden Hebelarme mit der Kurve der aufrichtenden Hebelarme liegt; |
| Φd | = | der Krängungswinkel, der beim zweiten Schnittpunkt der Kurve der krängenden Hebelarme mit der Kurve der aufrichtenden Hebelarme liegt oder der Einströmwinkel oder 40 Grad, je nachdem welcher Winkel der kleinste ist. |
Abbildung 2.8-2: Flächen A und B
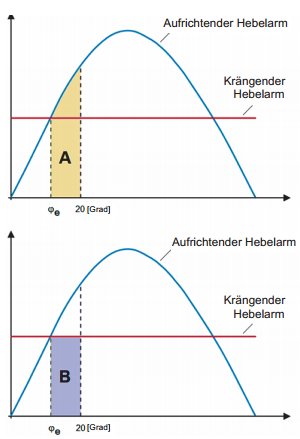
Abbildung 2.8-3: Flächen C und D
2.8.5 Bauliche Vorkehrungen gegen Kentern
2.8.5.1 Zugang zum Maschinenraum, ausgenommen Notzugang und Montageluken, muss möglichst innerhalb der Back angeordnet sein. Jeder Zugang vom freiliegenden Ladungsdeck zum Maschinenraum muss mit zwei wetterdichten Verschlüssen versehen sein. Räume unter dem freiliegenden Ladungsdeck müssen vorzugsweise von einer Position innerhalb oder oberhalb des Aufbaudecks aus zugänglich sein.
2.8.5.2 Der Querschnitt der Wasserpforten in den Schanzkleidern an den Seiten des Ladungsdecks muss, je nach Anwendbarkeit, mindestens den Anforderungen der Regel 24 des Internationalen Freibord-Übereinkommens von 1966 oder des Protokolls von 1988 zu dem Internationalen Freibord-Übereinkommen von 1966 in seiner geänderten Fassung entsprechen. Die Anordnung der Wasserpforten muss sorgfältig erwogen werden, um sicherzustellen, dass Wasser, das sich auf dem Arbeitsdeck und in Nischen im Backendschott angesammelt hat, am effektivsten abläuft. Auf Schiffen, die in Gebieten betrieben werden, in denen mit Vereisung zu rechnen ist, dürfen die Wasserpforten nicht mit Klappen versehen sein.
2.8.5.3 Ein Schiff im Schleppbetrieb muss mit einer Vorrichtung zum schnellen Slippen der Schleppleine ausgerüstet sein.*
____
*) Mit Schleppwindensystemen ausgerüstete Schiffe müssen ebenfalls mit einer Vorrichtung zum schnellen Slippen der Schleppleine ausgerüstet sein.
2.8.6 Betriebliche Vorkehrungen gegen Kentern
2.8.6.1 Die Anordnung von an Deck gestauter Ladung muss so sein, dass ein Blockieren der Wasserpforten oder ein plötzliches Verrutschen der Ladung an Deck vermieden wird. Sofern sich Ladung an Deck befindet, darf diese die Bewegung der Schleppleine nicht behindern.
2.8.6.2 Bei allen Betriebsbedingungen muss am Heck ein Mindestfreibord von mindestens 0,005 x LLL eingehalten werden.
2.9 Schiffe im Hebebetrieb
2.9.1 Anwendungsbereich
2.9.1.1 Die nachfolgenden Vorschriften gelten für Schiffe im Hebebetrieb, deren Kiel am oder nach dem 1. Januar 2020 gelegt wird oder die sich zu diesem Zeitpunkt in einem entsprechenden Bauzustand * befinden sowie für Schiffe, die nach diesem Zeitpunkt für den Einsatz im Hebebetrieb umgebaut werden.
_____
*) Entsprechender Bauzustand bezeichnet den Zustand:
- der den Baubeginn eines bestimmten Schiffes erkennen lässt und
- in dem die Montage von mindestens 50 Tonnen oder 1 v. H. des geschätzten Gesamtbedarfs an Baumaterial begonnen hat, je nachdem welcher Wert kleiner ist.
2.9.1.2 Die Vorschriften dieses Abschnittes müssen auf Einsätze angewendet werden, die das Heben schiffseigener Strukturen beinhalten oder auf Hebevorgänge, bei denen das größte durch das Heben verursachte Krängungsmoment größer ist als das durch folgende Formel angegebene:
Dabei ist:
| ML | = | Schwellenwert für das Krängungsmoment, in (t.m), das durch die (Hebeeinrichtung und) Last an der Hebeeinrichtung hervorgerufen wird; |
| GM | = | die metazentrische Anfangshöhe, in (m), mit freier Oberflächenkorrektur, einschließlich der Wirkung der (Hebeeinrichtung und) Last an der Hebeeinrichtung; |
| f | = | der Mindestfreibord, in (m), gemessen von der Oberseite des Wetterdecks bis zur Wasserlinie; |
| B | = | die Breite des Schiffes auf Spanten, in (m); und |
| Δ | = | die Verdrängung des Schiffes, einschließlich der angehobenen Last, in (t). |
Die Vorschriften dieses Abschnittes gelten auch für Schiffe in einem Hebebetrieb, bei dem kein querschiffs wirkendes Krängungsmoment auftritt und bei dem sich der Schwerpunkt des Schiffes in der Senkrechten (VCG) aufgrund des angehobenen Gewichtes um mehr als 1 v. H. nach oben verlagert.
Die Berechnungen müssen für die ungünstigsten Ladefälle erfolgen, bei denen die Hebeeinrichtung genutzt werden soll.
2.9.1.3 Im Sinne dieses Abschnitts sind nichtexponierte Gewässer solche, bei denen die Umwelteinflüsse auf den Hebebetrieb vernachlässigbar sind.
Andernfalls sind Gewässer als exponiert zu betrachten.
Im Allgemeinen sind nichtexponierte Gewässer ruhige Gewässerbereiche, d. h. Flussmündungen, Reeden, Buchten, Lagunen, in denen die Windstreichlänge * höchstens sechs Meilen beträgt.
_____
*) Die Windstreichlänge ist eine hindernisfreie waagerechte Strecke, über die der Wind geradlinig über Wasser streichen kann.
2.9.2 Last und Schwerpunkt in der Senkrechten für verschiedene Arten von Hebebetrieb
2.9.2.1 Beim Hebebetrieb unter Einsatz einer Hebevorrichtung, die aus einem Kran, Ladebaum, Ausleger, A-förmigen Rahmen oder ähnlichem besteht:
- muss die Größe der lotrecht wirkenden Last (PL) der größten bei einer gegebenen Auslage der Hebeeinrichtung zulässigen statischen Last entsprechen;
- ist der seitliche Abstand (y) der Abstand in Querschiffsrichtung zwischen dem Punkt, an dem die lotrecht wirkende Last auf die Hebeeinrichtung einwirkt, und der Schiffslängsachse bei aufrechter Schwimmlage;
- wird die senkrechte Höhe der Last (KGload) als der senkrechte Abstand zwischen dem Punkt, an dem die lotrecht wirkende Last auf die Hebeeinrichtung einwirkt, und der Grundlinie bei aufrechter Schwimmlage angenommen; und
- muss die Änderung der Schwerpunktslage der Hebeeinrichtungen) berücksichtigt werden.
2.9.2.2 Beim Hebebetrieb ohne Einsatz einer Hebevorrichtung, die aus einem Kran, Ladebaum, Ausleger, A-förmigen Rahmen oder ähnlichem besteht, bei dem ganz oder teilweise unter Wasser befindliche Gegenstände über in oder nahe der Deckshöhe gelegene Rollen oder Umlenkpunkte gehoben werden:
- muss die Größe der lotrecht wirkenden Last (PL) der Bremshaltekraft der Winde entsprechen;
- ist der seitliche Abstand (y) der Abstand in Querschiffsrichtung zwischen dem Punkt, an dem die lotrecht wirkende Last auf das Schiff einwirkt, und der Schiffslängsachse bei aufrechter Schwimmlage; und
- wird die senkrechte Höhe der Last (KGload) als der senkrechte Abstand zwischen dem Punkt, an dem die lotrecht wirkende Last auf das Schiff einwirkt, und der Grundlinie bei aufrechter Schwimmlage angenommen.
2.9.3 Stabilitätskriterien
2.9.3.1 Die hier enthaltenen Stabilitätskriterien oder gegebenenfalls die in den Absätzen 2.9.4, 2.9.5 oder 2.9.7 enthaltenen Stabilitätskriterien müssen bei der ungünstigsten Lage der Hebeeinrichtung und ihrer Last für alle Ladefälle erfüllt werden, bei denen Hebebetrieb vorgesehen ist. Im Sinne dieses Abschnitts müssen die Hebeeinrichtung und ihre Lasten) und ihr Schwerpunkt (COG) in die Verdrängung und den Schwerpunkt des Schiffes eingerechnet werden, wobei dann kein Krängungsmoment/krängender Hebelarm von außen wirkt.
2.9.3.2 Alle während des Hebebetriebs benutzten Ladefälle müssen die in den Abschnitten 2.2 und 2.3 von Teil A vorgegebenen Stabilitätskriterien erfüllen. Sofern die Merkmale eines Schiffes die Einhaltung des Abschnitts 2.2 von Teil A unmöglich machen, müssen die in Kapitel 4 der "Erläuterungen zum internationalen Code über Intaktstabilität aller Schiffstypen von 2008" vorgegebenen gleichwertigen Stabilitätskriterien angewendet werden. Während des Hebebetriebes müssen auch, wie in Absatz 2.9.1 bestimmt, die folgenden Stabilitätskriterien angewendet werden:
- der Krängungswinkel beim Gleichgewichtszustand, Φ1, darf nicht größer sein als der größte statische Krängungswinkel, für den die Hebeeinrichtung ausgelegt ist und der bei der Zulassung des Ladegeschirrs berücksichtigt wurde;
- während des Hebebetriebs in nichtexponierten Gewässern darf der Mindestabstand zwischen der Wasseroberfläche und dem obersten durchlaufenden Deck, das den wasserdichten Schiffskörper abschließt, unter Berücksichtigung von Trimm und Krängung an keiner Stelle der gesamten Schiffslänge weniger als 0,50 Meter betragen; und
- während des Hebebetriebs in exponierten Gewässern darf der Restfreibord nicht weniger als 1,00 Meter oder als 75 v. H. der größten während
des Betriebes angetroffenen kennzeichnenden Wellenhöhe HS, in (m), betragen, je nachdem welcher Wert größer ist.
2.9.4 Hebebetrieb, der bei Vorliegen von Umwelt- oder Betriebsbeschränkungen durchgeführt wird
2.9.4.1 Für Hebebetrieb bei Bedingungen, die innerhalb der in Absatz 2.9.4.1.1 niedergelegten klar definierten Grenzen durchgeführt werden, dürfen anstelle der in Absatz 2.9.3 enthaltenen Kriterien die in Absatz 2.9.4.1.2 niedergelegten Intaktkriterien angewendet werden.
- Die Grenzen der Umweltbedingungen müssen mindestens das Folgende angeben:
- die größte kennzeichnende Wellenhöhe HS; und
- die größte Windgeschwindigkeit (eine Minute andauernd in 10 Metern Höhe über dem Meeresspiegel).
Die Grenzen der Einsatzbedingungen müssen mindestens das Folgende angeben:
- Die längste Dauer des Hebevorgangs;
- Beschränkungen der Schiffsgeschwindigkeit; und
- Verkehrsbeschränkungen / Verkehrslenkung.
- Die folgenden Stabilitätskriterien müssen gelten, wenn sich die angehobene Last in der ungünstigsten Lage befindet:
- die Ecke des obersten durchlaufenden Decks, das den wasserdichten Schiffskörper abschließt, darf nicht eintauchen;
- ARL > 1,4 × AHL
Dabei ist:
ARL = die Fläche unter der um das Krängungsmoment durch den Kran und gegebenenfalls um das durch den Gegenballast bewirkte aufrichtende Moment berichtigten Kurve der auf richtenden Netto-Hebelarme im Bereich vom Krängungswinkel beim Gleichgewichtszustand, Φ1, bis zu dem Einströmwinkel, ΦF, dem Winkel bei dem die Stabilität verschwindet, ΦR, oder dem zweiten Schnittpunkt der Kurve der aufrichtenden Hebelarme mit der Kurve der Winddruckhebelarme, je nachdem welcher Winkel der kleinste ist, siehe Abbildung 2.9-1; AHL = die Fläche unter der Kurve der Winddruckhebelarme aufgrund der auf das Schiff und die angehobene Last wirkenden Windkraft bei der größten in Absatz 2.9.4.1.1 spezifizierten Windgeschwindigkeit, siehe Abbildung 2.9-1. Abbildung 2.9-1: Intaktkriterien bei Vorliegen von Umwelt- und Betriebsbeschränkungen
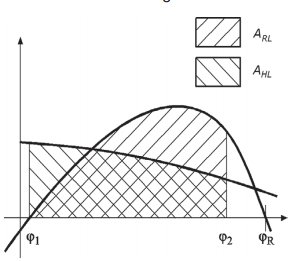
- Die Fläche unter der Kurve der aufrichtenden Netto-Hebelarme zwischen dem Krängungswinkel beim Gleichgewichtszustand, Φ1, und dem Einströmwinkel ΦF, oder dem Winkel von 20°, je nachdem welcher Winkel kleiner ist, muss mindestens 0,03 m rad betragen.
2.9.5 Plötzlicher Verlust der Hakenlast
2.9.5.1 Ein Schiff im Hebebetrieb, das Gegenballast verwendet, muss in der Lage sein, dem plötzlichen Verlust der Hakenlast standzuhalten, wobei der ungünstigste Punkt zu berücksichtigen ist, an dem die Hakenlast auf das Schiff einwirkt (d. h. das größte Krängungsmoment). Zu diesem Zweck muss die Fläche auf der der angehobenen Last gegenüberliegenden Seite des Schiffes (Fläche 2), wie in Abbildung 2.9-2 dargestellt, um den im folgenden angegebenen Betrag größer sein, als die Restfläche auf der Seite, an der die Last angehoben wird (Fläche 1):
Fläche 2 > 1,4 × Fläche 1,
für Hebebetrieb in exponierten Gewässern.
Fläche 2 > 1,0 × Fläche 1,
für Hebebetrieb in nichtexponierten Gewässern.
Abbildung: 2.9-2
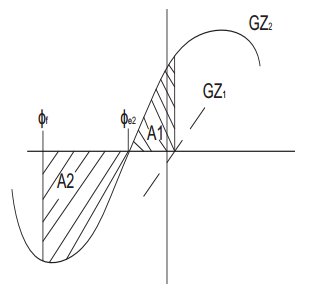
| GZ1 | = | Kurve der aufrichtenden Netto-Hebelarme (GZ) für den Zustand vor dem Verlust der Last am Kran, berichtigt um Krängungsmoment durch den Kran und gegebenenfalls um das durch den Gegenballast bewirkte aufrichtende Moment; |
| GZ2 | = | Kurve der aufrichtenden Netto-Hebelarme (GZ) für den Zustand nach Verlust der Last am Kran, gegebenenfalls berichtigt um das durch den Gegenballast bewirkte Quermoment; |
| Φe2 | = | der Winkel, bei dem nach dem Verlust der Last am Kran statisches Gleichgewicht herrscht; |
| Φf | = | der Einströmwinkel oder der Krängungswinkel beim zweiten Schnittpunkt der Kurven der krängenden Hebelarme und der aufrichtenden Hebelarme, je nachdem welcher Winkel kleiner ist; und |
Der Ausdruck "Netto-Hebelarm" bedeutet, dass der tatsächliche Schwerpunkt des Schiffes in Querrichtung als Funktion des Krängungswinkels in die Berechnung der GZ-Kurve eingeht.
2.9.6 Alternative Methode
2.9.6.1 Die Kriterien in Absatz 2.9.6 dürfen auf ein Schiff im Hebebetrieb, wie es in Absatz 2.9.1 bestimmt ist, alternativ zu den jeweils zutreffenden Kriterien in den Absätzen 2.9.3 bis 2.9.5 angewendet werden. Im Sinne dieses Abschnittes und der in Absatz 2.9.7 niedergelegten Stabilitätskriterien wird die angehobene Last, die eine Krängung des Schiffes verursacht, für den Zweck der Stabilitätsberechnung in ein Krängungsmoment bzw. einen krängenden Hebelarm umgewandelt, das bzw. der auf die Kurve der aufrichtenden Hebelarme des Schiffes angewendet wird.
2.9.6.2 Das aufgrund einer angehobenen Last auf das Schiff wirkende Krängungsmoment und der zugehörige krängende Hebelarm müssen unter Verwendung der folgenden Formeln berechnet werden:
HMΦ= PL * y * cos Φ
HLΦ= HMΦ÷ Δ
Dabei ist:
| HMΦ | = | das Krängungsmoment, in (t.m), aufgrund der angehobenen Last bei Φ; |
| PL | = | die lotrecht wirkende Komponente der angehobenen Last in (t), wie in 2.9.2.1.1 definiert; |
| y | = | der seitliche Abstand der angehobenen Last in (m), wie in 2.9.2.1.2 definiert, |
| Φ | = | der Krängungswinkel; |
| HLΦ | = | der krängende Hebelarm aufgrund der angehobenen Last bei Φ, in (m); und |
| Δ | = | die Verdrängung des Schiffes mit der angehobenen Last, in (t). |
2.9.6.3 Zur Anwendung der in Absatz 2.9.7 enthaltenen Kriterien für den Fall des plötzlichen Verlustes der angehobenen Last bei Verwendung von Gegenballast müssen die den Gegenballast beinhaltenden krängenden Hebelarme mittels folgender Formeln berechnet werden:
| CHL1 | = | |
| CBHL2 | = |
Dabei ist:
| CBM | = | das vom Gegenballast hervorgerufene Krängungsmoment, in (t.m); |
| CHL1 | = | der kombinierte krängende Hebelarm, in (m), aufgrund der zu hebenden Last und des Krängungsmoments des Gegenballastes bei einer Verdrängung, die derjenigen des Schiffes mit der zu hebenden Last entspricht; und |
| CBHL2 | = | der vom durch den Gegenballast hervorgerufenen Krängungsmoment hervorgerufene krängende Hebelarm, in (m), bei einer Verdrängung, die derjenigen des Schiffes ohne die zu hebende Last entspricht. |
2.9.6.4 Der Krängungswinkel beim Gleichgewichtszustand Φe, auf den in 2.9.7 Bezug genommen wird, bezeichnet den Winkel des ersten Schnittpunkts der Kurve der aufrichtenden Hebelarme mit der Kurve der krängenden Hebelarme.
2.9.7 Alternative Stabilitätskriterien
2.9.7.1 Für die Ladefälle, bei denen Hebebetrieb vorgesehen ist, aber noch nicht begonnen hat, müssen die in den Abschnitten 2.2 und 2.3 von Teil A vorgegebenen Stabilitätskriterien eingehalten werden. Sofern die Merkmale eines Schiffes die Einhaltung des Abschnitts 2.2 von Teil A unmöglich machen, müssen die in Kapitel 4 der "Erläuterungen zum internationalen Code über Intaktstabilität aller Schiffstypen von 2008" vorgegebenen gleichwertigen Stabilitätskriterien angewendet werden. Während des Hebebetriebes müssen, wie in Absatz 2.9.1 bestimmt, die folgenden Stabilitätskriterien angewendet werden:
- die Fläche der restlichen aufrichtenden Hebelarme unterhalb der Kurve der aufrichtenden Hebelarme und oberhalb der Kurve der krängenden Hebelarme zwischen Φe und 40° oder, falls dieser kleiner ist, dem Winkel, bei dem der restliche aufrichtende Hebelarm am größten ist, darf nicht kleiner sein als:
0,080 m rad, wenn der Hebebetrieb in exponierten Gewässern durchgeführt wird; oder
0,053 m rad, wenn der Hebebetrieb in nichtexponierten Gewässern durchgeführt wird; - zusätzlich ist der Winkel beim Gleichgewichtszustand auf den kleinsten der folgenden Werte zu begrenzen:
- 10 Grad;
- den Winkel, bei dem das oberste durchlaufende Deck, das den wasserdichten Schiffskörper abschließt, eintaucht; oder
- den für die Hebevorrichtung zulässigen Wert für Trimm/Krängung (Daten sind aus den vom Hersteller eingeholten zulässigen Werten für Schrägzug senkrecht zu der und in der Ladebaumebene abzuleiten).
2.9.7.2 Ein Schiff im Hebebetrieb, das Gegenballast verwendet, muss in der Lage sein, dem plötzlichen Verlust der Last am Haken standzuhalten, wobei der ungünstigste Punkt, an dem die Last am Haken auf das Schiff einwirkt (d. h. das größte Krängungsmoment bewirkt) zu berücksichtigen ist. Zu diesem Zweck muss die Fläche auf der der angehobenen Last gegenüberliegenden Seite des Schiffes (Fläche 2) in Abbildung 2.9-3, um den im folgenden angegebenen Betrag größer sein, als die Restfläche auf der Seite, an der die Last angehoben wird (Fläche 1) in Abbildung 2.9-3:
Fläche 2 - Fläche 1 > K,
Dabei ist:
| K | = | 0,037 m rad, für einen Hebebetrieb in exponierten Gewässern, und |
| K | = | 0,0 m rad, für einen Hebebetrieb in nichtexponierten Gewässern. |
Abbildung 2.9-3
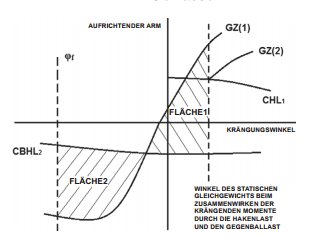
| GZ(1) | = | Die Kurve der aufrichtenden Hebelarme bei der Verdrängung, die derjenigen des Schiffes ohne die Last am Haken entspricht; |
| GZ(2) | = | Die Kurve der aufrichtenden Hebelarme bei der Verdrängung, die derjenigen des Schiffes mit der Last am Haken entspricht; |
| Fläche 2 | = | Die Restfläche zwischen GZ(1) und CBHL2 bis zum Einströmwinkel oder bis zum Winkel beim zweiten Schnittpunkt von GZ(2) und CBHL2, je nachdem welcher Winkel der kleinere ist. |
| Fläche 1 | = | Die Restfläche unterhalb von GZ(1) und oberhalb von CBHL2 bis Φe. |
2.9.8 Modellversuche oder direkte Berechnungen
2.9.8.1 Nach einer für die Verwaltung akzeptierbaren Methodik durchgeführte Modellversuche oder direkte Berechnungen, die die Überlebensfähigkeit des Schiffes nach einem plötzlichen Verlust der Last am Haken nachweisen, dürfen als Alternative zur Einhaltung der Anforderungen der Absätze 2.9.5 oder 2.9.7.2 zugelassen werden, sofern:
- die Wirkung von Wind und Wellen berücksichtigt wird; und
- die größte dynamische Rollamplitude des Schiffes nach dem Verlust der Last nicht zum Eintauchen ungeschützter Öffnungen führt.
2.9.9 Betriebliche Vorkehrungen gegen Kentern
2.9.9.1 Schiffe müssen Bedingungen mit resonantem Rollen meiden, wenn sie sich im Hebebetrieb befinden."
Kapitel 3 - Hinweise zur Erstellung von Stabilitätsunterlagen
3.4 Zu überprüfende Standardladefälle
3.4.1 Ladefälle
6 Die folgenden neuen Absätze 3.4.1.7 bis 3.4. 1.10 werden hinter dem bestehenden Absatz 3.4.1.6 hinzugefügt:
"3.4.1.7 Für ein Schiff im Ankerziehbetrieb müssen, zusätzlich zu den Standardladefällen für ein Frachtschiff in Absatz 3.4.1.2, die folgenden Ladefälle Standardladefälle sein:
- Betriebsladefall beim größten Tiefgang, bei dem Ankerziehbetrieb erfolgen kann, mit den krängenden Hebelarmen gemäß der Definition in Absatz 2.7.2 für die Leinenzugkraft, die das Schiff aufbringen kann mit mindestens 67 v. H. Vorräten und Treibstoff, bei dem alle relevanten Stabilitätskriterien, wie sie in Absatz 2.7.4 festgelegt sind, eingehalten werden;
- Betriebsladefall beim kleinsten Tiefgang, bei dem Ankerziehbetrieb erfolgen kann, mit den krängenden Hebelarmen gemäß der Definition in Absatz 2.7.2 für die Leinenzugkraft, die das Schiff aufbringen kann mit 10 v. H. Vorräten und Treibstoff, bei dem alle relevanten Stabilitätskriterien, wie sie in Absatz 2.7.4 festgelegt sind, eingehalten werden.
3.4.1.8 Für ein Schiff im Hafen-, Küsten- oder Hochseeschleppbetrieb und/oder im Assistenzbetrieb müssen, zusätzlich zu den Standardladefällen für ein Frachtschiff in Absatz 3.4.1.2, die folgenden Ladefälle in den Standardladefällen enthalten sein:
- größter Betriebstiefgang, bei dem Schlepp- oder Assistenzbetrieb durchgeführt wird, unter Berücksichtigung voller Vorräte und Treibstoff;
- kleinster Betriebstiefgang, bei dem Schlepp- oder Assistenzbetrieb durchgeführt wird, unter Berücksichtigung von 10 v. H. Vorräten und Treibstoff; und
- Zwischenzustand mit 50 v. H. Vorräten und Treibstoff.
3.4.1.9 Für Schiffe im Hebebetrieb müssen Ladefälle im Stabilitätshandbuch enthalten sein, die die betrieblichen Beschränkungen des Schiffes widerspiegeln. Gegebenenfalls muss die Verwendung von Gegenballast klar dokumentiert werden und die Angemessenheit der Stabilität des Schiffes im Falle des plötzlichen Verlustes der Hakenlast muss nachgewiesen werden.
3.4.1.10 Die jeweils zutreffenden der in den Absätzen 2.9.3, 2.9.4, 2.9.5 oder 2.9.7 aufgestellten Kriterien müssen bei allen Ladefällen, bei denen ein Heben beabsichtigt ist, erfüllt werden, wobei sich die Hakenlast in den ungünstigsten Lagen befindet. Für jeden Ladefall müssen das Gewicht und der Schwerpunkt der angehobenen Last, die Hebevorrichtung und gegebenenfalls der Gegenballast enthalten sein. Die ungünstigste Lage kann aus dem Lastdiagramm entnommen werden und wird dort gefunden, wo die Summe der Momente um die Querachse und um die Hochachse am größten ist. Die Prüfung zusätzlicher, den verschiedenen Baumstellungen und (gegebenenfalls) Gegenballast mit unterschiedlichen Füllständen entsprechender Ladefälle kann erforderlich sein."
3.4.2 Annahmen für die Berechnung von Ladefällen
7 Im Absatz 3.4.2.3 wird der folgende Satz am Ende eingefügt:
"Fährt ein Schiff in Bereichen, in denen mit einer Vereisung gerechnet werden kann, sind Zuschläge für Vereisung nach Maßgabe der Vorschriften des Kapitels 6 (Vereisung) zu berücksichtigen."
5. Fährt ein Fahrzeug in Bereichen, in denen mit einer Vereisung gerechnet werden kann, sind Zuschläge für Vereisung nach Maßgabe der Vorschriften des Kapitels 6 (Vereisung) zu berücksichtigen.
wird gestrichen.
2. Zuschläge für eine voraussichtliche Vereisung in Übereinstimmung mit Abschnitt 6.3;
wird gestrichen und die übrigen Unterabsätze werden entsprechend umnummeriert.
10 Die folgenden neuen Absätze 3.4.2.9 bis 3.4.2.11 werden wie folgt hinzugefügt:
"3.4.2.9 Für Schiffe im Hafen-, Küsten- oder Hochseeschleppbetrieb, im Assistenzbetrieb, im Ankerziehbetrieb oder im Hebebetrieb müssen bei der Berechnung von Ladefällen Zuschläge gemacht werden für das zu erwartende Gewicht von Ladung an und unter Deck, für Kette in Kettenkästen, für die zu erwartende Art von Draht oder Tau auf Stautrommeln und für Draht auf den Winden.
3.4.2.10 Für Schiffe im Ankerziehbetrieb muss die Einhaltung der relevanten Stabilitätskriterien für jedes Schlepp-Pfostenpaar und die zugehörigen zulässigen Zugkräfte der Leine, einschließlich jeglicher baulichen Teile oder Einrichtungen, die die Bewegung der Leine beschränken können, erfolgen.
3.4.2.11 Für Schiffe im Ankerziehbetrieb müssen die Bezugsladefälle in Absatz 3.4.1.8 die Stabilitätskriterien in Absatz 2.7.4 mindestens für das kleinste a von 5 Grad erfüllen, wenn die auslegungsgemäße Zugkraft Fd, auf das Schlepp-Pfostenpaar, das der Schiffslängsachse am nächsten liegt, aufgebracht wird."
3.5 Berechnung von Stabilitätskurven
11 Der folgende neue Abschnitt 3.5.4 wird hinter dem bestehenden Abschnitt 3.5.3 hinzugefügt:
"3.5.4 Berechnung von Stabilitätskurven für Schiffe im Ankerziehbetrieb, die dem Abschnitt 2.7 unterliegen
3.5.4.1 Für die den vorgesehenen Ankerziehbetrieb abdeckenden Tiefgangs- (oder Verdrängungs-) und Trimmwerte sind Kurven (oder Tabellen) der zulässigen Zugkräfte als Funktion des zulässigen KG (oder GM) bereitzustellen. Die Kurven (oder Tabellen) müssen unter den folgenden Annahmen erstellt werden:
- KG ist das dem genehmigten Stabilitätshandbuch entnommene größte zulässige KG;
- es müssen Angaben zur Kurve oder Tabelle der zulässigen Zugkräfte für jedes Schlepp-Pfostenpaar, einschließlich jeglicher baulichen Teile oder Einrichtungen, die die Bewegung der Leine beschränken können, als Funktion der Stabilitätsgrenzkurve enthalten sein;
- sofern dies wünschenswert ist, muss für jeden speziellen Ladefall eine Kurve oder Tabelle der zulässigen Zugkräfte bereitgestellt werden;
- die für den Tiefgang (oder die Verdrängung), den Trimm und KG (oder GM) zu berücksichtigenden Werte sind diejenigen vor der Einwirkung der Zugkraft; und
- sofern Tabellen zur Verfügung gestellt werden, die die in Absatz 3.8.2 angesprochenen Betriebs-, Warn- und Arbeitsstoppbereiche gegeneinander abgrenzen ("Grüne", "Gelbe" oder "Bernsteinfarbene" bzw."Rote" Farbkennzeichnung), dürfen die mit baulichen Gegebenheiten des Hecks, einschließlich der Leitrollen, verbundenen Abgrenzungswinkel zur Festlegung der Grenzen zwischen den Betriebs-
und Warnbereichen (Grenze zwischen Grün und Gelb) sowie zwischen den Warnbereichen und Arbeitsstoppbereichen (Grenze zwischen Gelb und Rot) verwendet werden."
3.6 Stabilitätshandbuch
12 Die folgenden neuen Absätze 3.6.3 bis 3.6.5 werden hinter dem bestehenden Absatz 3.6.2 eingefügt:
"3.6.3 Das Stabilitätshandbuch für Schiffe im Ankerziehbetrieb muss zusätzliche Angaben enthalten über:
- den größten Pfahlzug, die Zugkraft der Winde und die Haltekraft der Bremse;
- Einzelheiten der Einrichtung zum Ankerziehen, wie z.B. Lage des Befestigungspunktes des Drahtes, Bauart und Anordnung der Schlepp-Pfosten, Heckrolle, alle Punkte oder Elemente, an denen eine Zugkraft auf das Schiff einwirkt;
- Erkennen kritischer Einströmöffnungen;
- Hinweise zu den zulässigen Zugkräften für jede Betriebsart und jedes Schlepp-Pfostenpaar, einschließlich jeglicher baulichen Teile oder Einrichtungen, die die Bewegung der Leine beschränken können, als Funktion aller relevanten Stabilitätskriterien; und
- Empfehlungen zur Nutzung von Rolldämpfungssystemen.
3.6.4 Das Stabilitätshandbuch für Schiffe im Hafen-, Küsten- oder Hochseeschleppbetrieb und/oder im Assistenzbetrieb muss zusätzliche Angaben enthalten über:
- den größten Pfahlzug;
- die Einzelheiten der Auslegung der Schleppeinrichtung, einschließlich der Lage und der Bauart der (des) Angriffspunktes) der Schleppleine, wie z.B. Schlepphaken, Schleppblock, Klüse oder jeder andere, diesem Zweck dienende Punkt;
- das Erkennen der kritischen Einströmöffnungen;
- Empfehlungen für die Nutzung von Rolldämpfungssystemen;
- falls irgendein Draht usw. Teil des Leerschiffsgewichtes ist, müssen klare Hinweise zur Menge und Größe gegeben werden;
- den größten und kleinsten Tiefgang im Schlepp- und im Assistenzbetrieb,
- Anweisungen für die Nutzung der Vorrichtung zum schnellen Slippen; und
- für Schiffe im Assistenzbetrieb müssen die folgenden zusätzlichen Betriebshinweise enthalten sein:
- eine Tabelle mit den zulässigen Grenzwerten für den Krängungswinkel gemäß den in Absatz 2.7.3.4 als Funktion von Ladefall und Assistenzgeschwindigkeit enthaltenen Kriterien; und
- Anweisungen zu den verfügbaren Mitteln, um den Krängungswinkel innerhalb der zulässigen Grenzen zu halten.
3.6.5 Für Schiffe im Hebebetrieb, die dem Abschnitt 2.9 unterliegen, müssen im Stabilitätshandbuch zusätzliche Unterlagen enthalten sein:
- größtes Krängungsmoment für jede Richtung des Hebens/der Neigung als eine Funktion des Krängungsmoments durch Gegenballast, sofern solcher verwendet wird, des Tiefgangs und des Schwerpunktes in der Senkrechten;
- sofern fester Gegenballast verwendet wird, müssen die folgenden Angaben enthalten sein:
- Gewicht des festen Gegenballasts; und
- Schwerpunkt des festen Gegenballasts in Längs- und Querrichtung und in der Senkrechten (LCG, TCG, VCG);
- Ladefälle über die Bandbreite der Tiefgänge, bei denen Hebebetrieb mit der größten lotrechten Komponente der zu hebenden Last durchgeführt werden kann. Soweit zutreffend müssen für jeden Ladefall Kurven der aufrichtenden Hebelarme vor und nach dem Ablegen der Last angegeben werden;
- Beschränkungen des Kranbetriebes, einschließlich zulässiger Krängungswinkel, falls solche angegeben sind;
- betriebliche Beschränkungen, wie z.B.:
- größte sichere Arbeitslast (SWL);
- größte Betriebsausladung aller Ladebäume und Hebeeinrichtungen;
- größtes Lastmoment; und
- Umweltbedingung, die Auswirkungen auf die Stabilität des Schiffes hat;
- Anweisungen bezüglich des normalen Kranbetriebes, einschließlich solcher für die Verwendung von Gegenballast;
- Anweisungen wie z.B. Verfahren zur Aufnahme und Abgabe von Ballast zum Aufrichten des Schiffes nach einem unfallbedingten Abfallen der Last;
- Erkennen kritischer Einströmöffnungen;
- Empfehlungen zur Nutzung von Rolldämpfungssystemen;
- Zeichnung des Kranes mit Angabe des Gewichtes und des Schwerpunktes, einschließlich vom Kranhersteller festgesetzter Beschränkungen für Krängung/Trimm;
- ein Lastdiagramm des Kranes, mit angemessenen Abschlägen für die Wellenhöhe;
- Lastdiagramm für Hebebetrieb, das die Bandbreite der beim Heben auftretenden Betriebstiefgänge abdeckt und eine Zusammenfassung der Stabilitätsergebnisse einschließt;
- getrennt davon muss zur Information ein vom Hersteller geliefertes Kranhandbuch bereitgestellt werden;
- die Tabelle der Grenzwerte für die Last, die Ausladung und die Ladebaumneigung der Hebeeinrichtung, einschließlich Angabe von Grenzwinkeln für Schrägzug in der und senkrecht zu der Ladebaumebene und Grenzen des Schwenkbereiches sowie Bezug auf die Schiffslängsachse;
- eine Tabelle, die Trimm und Krängung des Schiffes in Beziehung setzt zur Last, zur Ausladung, zum Schwenkwinkel und Grenzen sowie zu den Grenzen für Schrägzug in der und senkrecht zu der Ladebaumebene;
- Verfahren zur Berechnung der Winkel für Schrägzug in der und senkrecht zu der Ladebaumebene sowie des Schwerpunktes des Schiffes in der Senkrechten (VCG) bei darauf einwirkender Last;
- sofern ein Anzeigesystem für das Lastmoment eingebaut ist, die damit zusammenhängenden Daten und die im System enthaltenen Kennzahlen;
- sofern die Schrägzüge in der und senkrecht zu der Ladebaumebene an der Hebeeinrichtung (Kran) den größten Winkel beim Gleichgewichtszustand des Schiffes bestimmen, muss das Stabilitätshandbuch eine Bemerkung enthalten, die die Hebeeinrichtung als den die Stabilität während des Hebebetriebes begrenzenden Faktor kenntlich macht; und
- Angaben zum Einsatz von (Stabilitäts-)Pontons zur Unterstützung des Hebebetriebes, sofern solche vorhanden sind.
Die Angaben in obigen Unterabsätzen .2 bis .19 dürfen in anderen an Bord des Schiffes befindlichen schiffsspezifischen Unterlagen enthalten sein. In diesem Fall muss im Stabilitätshandbuch ein Verweis auf diese Unterlagen enthalten sein."
und die bestehenden Absätze 3.6.3, 3.6.4 und 3.6.5 werden entsprechend als Absätze 3.6.6, 3.6.7 und 3.6.8 umnummeriert.
3.8 Betriebshandbücher für bestimmte Schiffstypen
13 Die folgenden neuen Abschnitte 3.8 und 3.9 werden hinter dem bestehenden Abschnitt 3.7 eingefügt:
"3.8 Betriebs- und Planungshandbücher für Schiffe im Ankerziehbetrieb, die dem Abschnitt 2.7 unterliegen
3.8.1 Zur Unterstützung des Kapitäns muss ein Betriebs- und Planungshandbuch an Bord gegeben werden, das Richtlinien für die Planung und Durchführung bestimmter Einsätze enthält. Die Richtlinien müssen Angaben enthalten, die ausreichen, um den Kapitän dazu zu befähigen, die anzuwendenden in diesem Code enthaltenen Anforderungen bei der Planung und dem Betrieb des Schiffes zu erfüllen. Soweit zutreffend müssen darin die folgenden Angaben enthalten sein:
- Einrichtungen zum Ankerziehen, einschließlich:
- Anordnung von Einzelheiten der Decksausrüstung zum Ankerziehen (Winden, Drahtstopper, Schlepp-Pfosten usw.);
- üblicher Anordnung von Ladung an Deck (Anker, Drähte, Ketten usw.);
- Kettenkästen, die beim Ausbringen von Verankerungen genutzt werden;
- Ankerzieh-/Schleppwinde; - Beistopperwinden;
- Heckrolle, einschließlich der seitlichen Begrenzungen an beiden Enden;
- Hebeeinrichtungen, sofern vorhanden und sofern sie eine mechanische Begrenzung gemäß Absatz 3.4.2.10 bilden; und
- typischer Drahtverläufe zwischen Winden und Heckrolle mit Darstellung der Sektoren, für die Einschränkungen gelten; und
- ausführliche Daten über die zulässigen Zugkräfte, Stabilitätsgrenzkurven und Empfehlungen zur Berechnung von Ladefällen für das Schiff, einschließlich Musterberechnungen.
3.8.2 Ein Einsatzplan muss vom Kapitän des Schiffes gebilligt und in Kopie vor dem Einsatzbeginn an einem Ort außerhalb des Schiffes verwahrt werden. Richtlinien und Verfahren zur Festlegung eines schrittweisen Einsatzplanes für einen bestimmten Einsatz müssen Anweisungen enthalten für:
- Ermittlung und Berechnung von Ladefällen für alle wesentlichen Einsatzphasen unter Berücksichtigung der erwarteten Verbräuche von Treibstoff und Vorräten, der Veränderungen der Decksladung und der Auswirkungen des Ausbringens oder Einholens des Drahtes auf die Winden und Kettenkästen;
- Planung von Ballastvorgängen;
- Festlegung der günstigsten Abfolge der Verbräuche und das Erkennen der zu den stärksten Belastungen führenden Situationen;
- Erkennen der Möglichkeit oder der Unzulässigkeit der Nutzung der Rolldämpfungssysteme in allen Betriebsphasen;
- Betrieb mit offenen Kettenkästen, z.B. zusätzliche Ladefälle für deren asymmetrische Füllung oder sonstige Maßnahmen zur Verringerung der Möglichkeit einer Flutung;
- Sammeln aktualisierter Wettervorhersagen und für Festlegen von Umweltbedingungen für den Ankerziehbetrieb;
- die Verwendung von Stabilitätsgrenzkurven und vorgesehener Zugkräfte;
- die Festlegung von Grenzwerten, bei deren Überschreitung die Arbeit abgebrochen werden muss:
- zulässige Zugkräfte und Betriebssektoren für a;,
- Krängungswinkel gemäß den Stabilitätskriterien; und
- Umweltbedingungen;
- Umsetzung und Festlegung von Verfahren für Korrekturen und für Notfälle;
- Festlegung:
- eines Betriebsbereiches, in dem der normale Betrieb bis zur zulässigen Zugkraft stattfindet, (d. h. ein "Grüner" Bereich);
- eines Warnbereiches (d. h. eines "Gelben" oder "Bernsteinfarbenen" Bereichs), in dem der Betrieb gedrosselt oder unterbrochen werden kann, um die Möglichkeiten des Schiffes für eine Rückkehr in den Betriebs- oder "Grünen" Bereich abzuwägen: der Warnbereich darf nicht kleiner sein als ein Winkel von 10 Grad, sofern die Tabelle 3.8.3 nichts anderes festlegt; und
- eines "Arbeitsstopp" Bereiches (d. h. eines "Roten" Bereiches), in dem der Einsatz abgebrochen werden muss, für den bei üblichen Einsätzen die Grenze zwischen Gelb und Rot bei nicht mehr als 45 Grad oder bei dem Punkt liegen darf, an dem der Draht vom Deck abhebt. Dessen ungeachtet darf Einsätzen in angemessener Weise Rechnung getragen werden, die sich von üblichen Ankerzieheinsätzen unterscheiden, bei denen die Einsatzplanung die Schiffssicherheit gewährleistet; und
- Beispiele für die Darstellung der zulässigen Zugkräfte werden in der Anlage 3 zum Teil B gegeben.
3.8.3 Die folgende Tabelle bietet eine Hilfestellung für die Festlegung der zulässigen Zugkräfte und der Bereiche auf Grundlage der Verfügbarkeit von Zugüberwachung und bordeigenem Stabilitätsrechner:
Tabelle 3.8.3
| Verfügbarkeit von Zugüberwachung und bordeigenem Stabilitätsrechner | Zugüberwachung ist nicht verfügbar | Zugüberwachung ist verfügbar, jedoch kein Stabilitätsrechner verfügbar | Sowohl Zugüberwachung als auch ein Stabilitätsrechner sind verfügbar |
| Zulässige Zugkraft Fp | Größte Zugkraft Fp, die innerhalb des Betriebsbereiches auslegungsgemäß im Draht wirken kann. | Fp wie im Stabilitätshand- buch, in den Richtlinien zur Einsatzplanung oder im spezifischen Einsatzplan beschrieben. | Fp gemäß der mit dem Stabilitätsrechner für den vorliegenden Ladefall erfolgten Berechnung. |
| Tabelle der zulässigen Werte | Der erste Wert für α muss 5° betragen.
Die einzige zulässige Zugkraft ist die auslegungsgemäß größte Zugkraft in der Leine, Fd.
Die Werte in der Tabelle geben Fd für solche Winkel α an, für die gilt: Fp > Fd. Der Warnbereich umfasst die Bereiche, in denen gilt: Fd > Fp > die größte Zugkraft der Schleppwinde. Der Arbeitsstoppbereich umfasst den gesamten übrigen Bereich, in dem gilt: Fp < die größte Zugkraft der Schleppwinde. Falls das Kriterium bei α= 5° nicht erfüllt wird, darf ohne Änderungen an der Winde kein Ankerziehen durchgeführt werden. | Es können Tabellen erstellt werden für verschiedene Tiefgangs-, Trimm-, KG- oder GM-Werte oder für spezielle vorbestimmte Ladefälle. Die Werte in der Tabelle müssen den Bereich von α= 0 bis α= 90º abdecken. Eine Tabelle muss den Wert von Fp an kritischen Punkten angeben und die Tabelle muss für jedes Schlepp-Pfostenpaar bereitgestellt werden. | Im Stabilitätshandbuch bereitgestellte Tabellen oder Kurven dürfen verwendet werden, wo Fp im gesamten uneingeschränkten Betriebsbereich die größte zu erwartende Drahtzugkraft übersteigt; andernfalls müssen für den vorliegenden Ladefall errechnete Tabellen oder Kurven entwickelt werden. |
| Bereiche | Der Betriebsbereich muss als der Sektor zwischen den beiden nach außenbords gemessenen Werten von αbestimmt werden, für die gilt:
Fp > Fd.
Der Warnbereich muss als der Sektor bestimmt werden, der zwischen dem α, für das gilt: Fp = Fd und dem α, für das gilt: Fp = die größte Zugkraft der Schleppwinde, liegt.0 Der Arbeitsstoppbereich muss alle übrigen Bereiche abdecken.
Die Sektoren müssen im Stabilitätshandbuch, in den Richtlinien zur Einsatzplanung oder in dem speziellen Einsatzplan angegeben werden.
Das Sektordiagramm kann für mehrere Ladefälle erstellt werden.
Falls das begrenzende α kleiner als 5°ist, | Die Bereiche können entweder auf Grundlage der in den Richtlinien zur Einsatzplanung enthaltenen üblichen betrieblichen Praxis entwickelt werden, z.B. so, dass der Betriebsbereich auf der Heckrolle liegt, der Warnbereich nicht weiter als 15 Grad über die Heckrolle hinaus reicht und darüber hinaus der rote Bereich gilt, oder sie können für einen bestimmten Betrieb entwickelt werden, bei dem der Betriebsbereich durch die um 10º verminderten Werte der nach außenbords gemessenen Werte von α bestimmt wird, für die gilt:
Fp = größte zu erwartende Drahtzugkraft, sofern α größer ist als 20º. Falls dieses α kleiner ist als 20°, ist der Betriebsbereich als der Sektor bestimmt, der zwischen halben Werten der nach außenbords gemessenen Werte von α liegt, für die gilt:
Fp = größte zu erwartende Drahtzugkraft.
In jedem Fall ist der Warnbereich festgelegt zwischen der Grenze des Betriebsbereiches und dem Wert von α, bei dem gilt:
Fp = größte zu erwartende Drahtzugkraft. | Die Bereiche können entweder auf Grundlage der in den Richtlinien zur Einsatzplanung enthaltenen üblichen betrieblichen Praxis entwickelt werden, z.B. so,
dass der Betriebsbereich auf der Heckrolle liegt, der Warnbereich nicht weiter als 15 Grad über die Heckrolle hinaus reicht und darüber hinaus der rote Bereich gilt, oder sie können für einen bestimmten Betrieb entwickelt werden, bei dem der Betriebsbereich durch die um 10º verminderten Werte der nach außenbords gemessenen Werte von α bestimmt wird, für die gilt: Fp = größte zu erwartende Drahtzugkraft, sofern α größer ist als 20º. Falls dieses α kleiner ist als 20°, ist der Betriebsbereich als der Sektor bestimmt, der zwischen halben Werten der nach außenbords gemessenen Werte von α liegt, für die gilt: Fp = größte zu erwartende Drahtzugkraft. In jedem Fall ist der Warnbereich festgelegt zwischen der Grenze des Betriebsbereiches und dem Wert von α, bei dem gilt:
Fp= größte zu erwartende Drahtzugkraft. |
3.9 Betriebs- und Planungshandbücher für Schiffe im Hebebetrieb, die dem Abschnitt 2.9 unterliegen.
3.9.1 Ein Einsatzplan muss vom Kapitän des Schiffes gebilligt und in Kopie vor dem Einsatzbeginn an einem Ort außerhalb des Schiffes verwahrt werden. Zur Unterstützung des Kapitäns muss ein Betriebs- und Planungshandbuch an Bord bereitgestellt werden, das Richtlinien für die Planung und Durchführung spezieller Einsätze enthält.
3.9.2 Die Richtlinien müssen ausreichende Angaben enthalten, um den Kapitän zur Planung und zum Betrieb des Schiffes gemäß den in diesem Code enthaltenen einschlägigen Anforderungen zu befähigen. Soweit zutreffend müssen darin die folgenden Angaben enthalten sein:
- Hebeeinrichtungen, Leistungsvermögen und Verfahren für den Betrieb des Hebesystems; und
- Ausführliche Daten zum Hebevermögen des Schiffes, zu betrieblichen Beschränkungen, zu Beschränkungen der Aufnahmefähigkeit von Ladung, zu Stabilitätsgrenzkurven und zu Empfehlungen für die Berechnung von Ladefällen für das Schiff, einschließlich Beispielrechnungen.
3.9.3 Richtlinien und Verfahren zur Festlegung eines schrittweisen Einsatzplanes für einen bestimmten Einsatz müssen Anweisungen enthalten für:
- Ermittlung und Berechnung von Ladefällen für alle wesentlichen Einsatzphasen unter Berücksichtigung der Veränderungen der Decksladung und der Auswirkungen des Ausbringens oder Einholens der Leine auf die Winden (insbesondere wenn das Heben bei großer Wassertiefe erfolgt);
- die Planung von Ballast- oder Gegenballastvorgängen;
- Erkennen der Möglichkeit der Nutzung der Rolldämpfungssysteme in allen Betriebsphasen;
- Sammeln neuester Wettervorhersagen, um die Umweltbedingungen für den beabsichtigten Hebebetrieb festzusetzen;
- gegebenenfalls Verwendung von Stabilitätsgrenzkurven;
- Festlegung von Grenzwerten, bei deren Überschreitung die Arbeit abgebrochen werden muss:
- Krängungswinkel gemäß den Stabilitätskriterien; und
- Umweltbedingungen; und
- Umsetzung und Festlegung von Verfahren für Korrekturen und für Notfälle."
und der bestehende Abschnitt 3.8 wird umnummeriert als Abschnitt 3.10.
Kapitel 4 - Computergestützte Stabilitätsberechnungen
4.1 Stabilitätsrechner
4.1.4 Funktionale Anforderungen
14 Der folgende neue Absatz 4.1.4.2 wird hinter dem bestehenden Absatz 4.1.4.1 eingefügt:
"4.1.4.2 Für Schiffe im Ankerziehbetrieb müssen Planungswerkzeuge gemäß den Anforderungen des Betriebshandbuchs bereitgestellt werden. Es müssen Angaben z.B. zu Ballast- und Verbrauchsabfolgen, zur zulässigen Zugkraft, zu Arbeitsbereichen, zu Krängungswinkeln und zur Verwendung von Rolldämpfungseinrichtungen gemacht werden."
und die bestehenden Absätze 4.1.4.2 bis 4.1.4.7 werden entsprechend in 4.1.4.3 bis 4.1.4.8 umnummeriert.
Teil B - Anlagen
15 Am Ende von Teil B wird eine neue Anlage 3 wie folgt hinzugefügt:
"Anlage 3
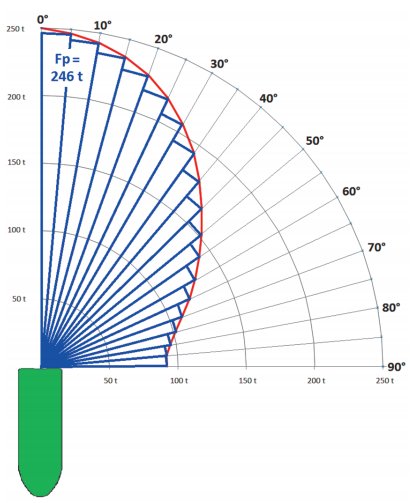
Empfohlenes Modell für die grafische oder tabellarische Darstellung zulässiger Zugkräfte zur Verwendung beim Ankerziehbetrieb.
Die Aufnahme eines empfohlenen Modells für die Darstellung zulässiger Zugkräfte als Funktion von a könnte für einen universellen Informationsstandard von Vorteil sein. Diese einheitliche Darstellung wird seine Verbreitung und die Vertrautheit der Betreiber mit dem Schiff und seiner Ausrüstung fördern.
Hier wird ein Beispiel für eine mögliche grafische Darstellung der zulässigen Zugkraft sowohl in Form einer Tabelle als auch in Form eines Diagramms eingefügt.
Abbildung A3-1: Tabelle der zulässigen Zugkraft für Schiff mit 3 Schlepp-Punkten
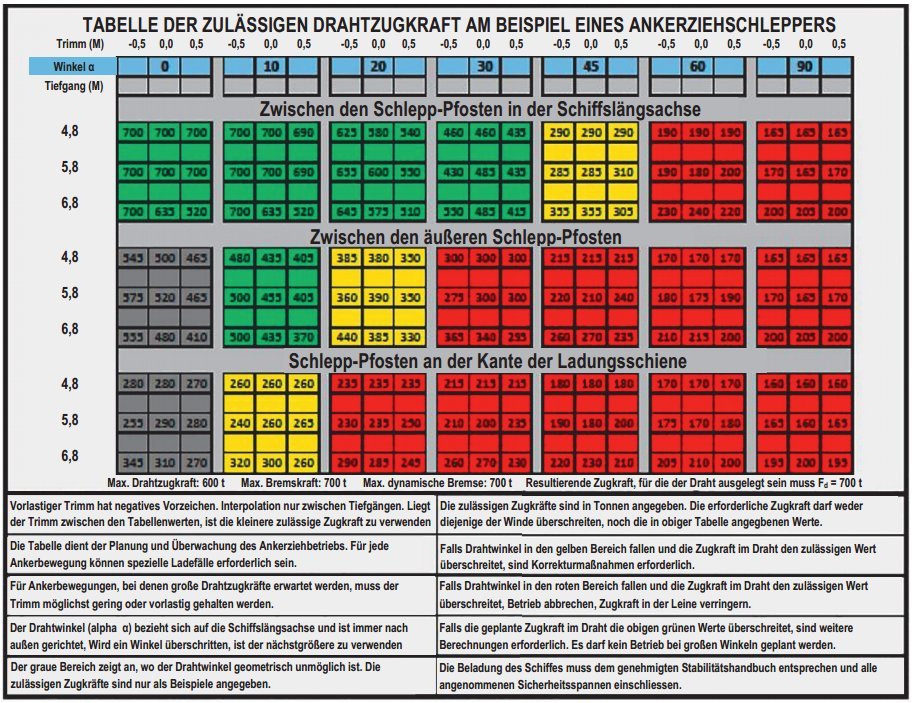
Abbildung A3-2: Darstellung der Betriebs-, Warn- und Arbeitsstoppbereiche (jeweils als "Grüne", "Gelbe" und "Rote" Bereiche gekennzeichnet)

Abbildung A3-3: Sektordiagramm der zulässigen Zugkraft auf Grundlage von Standardwerten für Alpha (5°, 10°, 15°, 90°)"
*) Durch die Dienststelle Schiffssicherheit der BG Verkehr wird hiermit die Entschließung des Schiffssicherheitsausschusses MSC.415(97), "Änderungen des Teils B des Internationalen Codes über Intaktstabilität von 2008 (IS-Code 2008)", in deutscher Sprache amtlich bekannt gemacht.
 | ENDE |
...
X
⍂
↑
↓