
 | zurück |  |
| Eingabeparameter für das Simulationsinstrument | Anlage 12 19 |
Diese Anlage enthält eine beschreibende Aufstellung der vom Hersteller des Getriebes, des Drehmomentwandlers (TC), der sonstigen Drehmoment übertragenden Bauteile (OTTC) und der sonstigen Bauteile des Antriebsstrangs (ADC) für das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
(1) "Parameter ID": im "Simulationsinstrument (simulation tool)" verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten
(2) "Type": Datentyp des Parameters
| string ... | Zeichenabfolge in ISO8859-1-Kodierung |
| token ... | Zeichenabfolge in ISO8859-1-Kodierung ohne Leerzeichen am Anfang/am Ende |
| date ... | Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DDTHH:MM:SSZ, wobei kursive Zeichen unveränderlich sind, z.B."2002-05-30T09:30:10Z" |
| integer ... | Wert mit integralem Datentyp ohne führende Nullen, z.B."1800" |
| double, X ... | Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen (".") und ohne führende Nullen, z.B. für "double, 2": 2345.67, für "double, 4": "45.6780" |
(3) "Unit" ... physikalische Einheit des Parameters
Satz von Eingabeparametern
Tabelle 1 Eingabeparameter "Transmission/General" 19 22
| Parameterbezeichnung | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Manufacturer | P205 | token | [-] | |
| Model | P206 | token | [-] | Bei Getrieben mit integriertem Differenzial ist nur das Übersetzungsverhältnis des Getriebes ohne Berücksichtigung der Achsgetriebeübersetzung anzugeben. |
| CertificationNumber | P207 | token | [-] | |
| Date | P208 | date Time | [-] | Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
| AppVersion | P209 | token | [-] | |
| TransmissionType | P076 | string | [-] | Zulässige Werte 1: "SMT", "AMT", "APT-S", "APT-P", "APT-N", "IHPC Type 1 |
| MainCertificationMethod | P254 | string | [-] | Zulässige Werte: "Option 1", "Option 2", "Option 3", "Standard values" |
| DifferentialIncluded |
P353 |
boolean |
[-] | |
| AxlegearRatio |
P150 |
double, 3 |
[-] | Optional, nur erforderlich, wenn "DifferentialIncluded" = "true" |
| 1) DCT ist als Getriebetyp AMT anzugeben. | ||||
Tabelle 2 Eingabeparameter "Transmission/Gears" pro Gang
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| GearNumber | P199 | integer | [-] | |
| Ratio | P078 | double, 3 | [-] | |
| MaxTorque | P157 | integer | [Nm] | fakultativ |
| MaxSpeed | P194 | integer | [1/min] | fakultativ |
Tabelle 3 Eingabeparameter "Transmission/LossMap" pro Gang und für jeden Gitterpunkt in der Verlustabbildung
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| Input Speed | P096 | double, 2 | [1/min] | |
| Input Torque | P097 | double, 2 | [Nm] | |
| Torque Loss | P098 | double, 2 | [Nm] |
Tabelle 4 Eingabeparameter "Torque Converter/General" 19
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| Manufacturer | P210 | token | [-] | |
| Model | P211 | token | [-] | |
| CertificationNumber | P212 | token | [-] | |
| Date | P213 | date Time | [-] | Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
| AppVersion | P214 | string | [-] | |
| CertificationMethod | P257 | string | [-] | Zulässige Werte: "Measured", "Standard values" |
Tabelle 5 Eingabeparameter "Torque Converter/Characteristics" für jeden Gitterpunkt der charakteristischen Kurve
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| Speed Ratio | P099 | double, 4 | [-] | |
| Torque Ratio | P100 | double, 4 | [-] | |
| Input TorqueRef | P101 | double, 2 | [Nm] |
Tabelle 6 Eingabeparameter "ADC/General" (nur erforderlich, wenn entsprechendes Bauteil vorhanden) 19 22
| Parametername | Parameter ID | Type | Unit | Beschreibung/Bezug |
| Manufacturer | P220 | token | [-] | |
| Model | P221 | token | [-] | |
| CertificationNumber | P222 | token | [-] | |
| Date | P223 | date Time | [-] | Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
| AppVersion | P224 | string | [-] | |
| Ratio | P176 | double, 3 | [-] | |
| CertificationMethod | P258 | string | [-] | Zulässige Werte: "Option 1", "Option 2", "Option 3", "Standard values" |
Tabelle 7 Eingabeparameter "ADC/LossMap" für jeden Gitterpunkt im Verlustkennfeld (nur erforderlich, wenn entsprechendes Bauteil vorhanden) 22
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| InputSpeed | P173 | double, 2 | [1/min] | |
| InputTorque | P174 | double, 2 | [Nm] | |
| TorqueLoss | P175 | double, 2 | [Nm] |
Tabelle 8 Eingabeparameter "Retarder/General" (nur erforderlich, wenn entsprechendes Bauteil vorhanden) 19
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| Manufacturer | P225 | token | [-] | |
| Model | P226 | token | [-] | |
| CertificationNumber | P227 | token | [-] | |
| Date | P228 | date Time | [-] | Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
| AppVersion | P229 | string | [-] | |
| CertificationMethod | P255 | string | [-] | Zulässige Werte: "Measured", "Standard values" |
Tabelle 9 Eingabeparameter "Retarder/LossMap" für jeden Gitterpunkt in der charakteristischen Kurve (nur erforderlich, wenn entsprechendes Bauteil vorhanden)
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Bezug |
| RetarderSpeed | P057 | double, 2 | [1/min] | |
| TorqueLoss | P058 | double, 2 | [Nm] |
| Überprüfung der Achsdaten | Anhang VII 19 22 |
1. Einleitung
In diesem Anhang werden die Zertifizierungsvorschriften zu den Drehmomentverlusten der Antriebsachsen für schwere Nutzfahrzeuge beschrieben. Alternativ zur Zertifizierung der Achsen kann zur Bestimmung der fahrzeugspezifischen CO2-Emissionen das Berechnungsverfahren für die Standard-Drehmomentverluste gemäß der Definition in Anlage 3 dieses Anhangs angewandt werden.
Im Sinne dieses gs gelten folgende Begriffsbestimmungen:
1."Einfach untersetzte Achse" (single reduction axle, SR) bezeichnet eine Antriebsachse mit nur einer Untersetzung, typischerweise einem Kegelradgetriebe mit oder ohne Achsversatz.2. "Portalachse" (single portal axle, SP) bezeichnet eine Achse, bei der die Drehachse des Kronenrads und die des Rades typischerweise höhenversetzt angeordnet sind, um eine höhere Bodenfreiheit oder, im Rahmen der Niederflurbauweise für Stadtbusse, einen niedrigeren Fahrzeugboden zu erzielen. Typischerweise erfolgt die erste Untersetzung über ein Kegelradgetriebe und die zweite über ein höhenversetzt nah an den Rädern angeordnetes Stirnradgetriebe (oder Schraubenradgetriebe).
3. "Nabenuntersetzungsachse (hub reduction axle, HR)" bezeichnet eine Antriebsachse mit zwei Untersetzungen. Bei der ersten handelt es sich typischerweise um ein Kegelradgetriebe mit oder ohne Achsversatz. Bei der zweiten handelt es sich um ein Planetengetriebe, das typischerweise im Bereich der Radnaben angebracht ist.
4. "Einfach untersetzte Durchtriebsachse" (single reduction tandem axle, SRT) bezeichnet eine Antriebsachse, die grundsätzlich einer einzelnen Antriebsachse gleicht, jedoch auch dazu dient, Drehmoment vom Eingangsflansch über einen Ausgangsflansch an eine weitere Achse zu übertragen. Das Drehmoment kann mithilfe eines Zahnradgetriebes am Eingangsflansch übertragen werden, um eine höhenversetzte Anordnung des Ausgangsflanschs zu ermöglichen. Eine weitere Möglichkeit ist der Einsatz eines zweiten Ritzels im Kegelradgetriebe, das das Drehmoment am Kronenrad abnimmt.
5. "Nabenuntersetzungsachse mit Durchtrieb" (hub reduction tandem axle, HRT) bezeichnet eine Nabenuntersetzungsachse, die die Möglichkeit hat, Drehmoment auf die in der Begriffsbestimmung für "einfach untersetzte Durchtriebsachse" beschriebene Weise nach hinten zu übertragen.
6. "Achsgehäuse" bezeichnet die Gehäuseteile, die für die strukturelle Tauglichkeit und als Träger der Antriebsstrangteile sowie der Lager und Dichtungen der Achse erforderlich sind.
7. "Ritzel" bezeichnet einen Teil eines normalerweise aus zwei Zahnrädern bestehenden Kegelradgetriebes. Das Ritzel ist das treibende, mit dem Eingangsflansch verbundene Zahnrad. Bei einer einfach untersetzten Durchtriebsachse/Nabenuntersetzungsachse mit Durchtrieb kann ein zweites Ritzel eingebaut werden, um Drehmoment vom Kronenrad abzunehmen.
8. "Kronenrad" bezeichnet einen Teil eines normalerweise aus zwei Zahnrädern bestehenden Kegelradgetriebes. Das Kronenrad ist das angetriebene Zahnrad und ist mit dem Differentialgehäuse verbunden.
9. "Nabenuntersetzung" bezeichnet das Planetengetriebe, das bei Nabenuntersetzungsachsen normalerweise außerhalb des Planetenträgers angebracht ist. Das Getriebe besteht aus drei verschiedenen Zahnrädern, dem Sonnenrad, den Planetenrädern und dem Hohlrad. Das Sonnenrad befindet sich im Zentrum, die Planetenräder rotieren um das Sonnenrad und sind mit dem Planetenträger verbunden, der an der Radnabe befestigt ist. Die Zahl der Planetenräder beträgt typischerweise zwischen drei und fünf. Das Hohlrad rotiert nicht und ist am Achskörper befestigt.
10. "Planetenräder" bezeichnet die Zahnräder, die innerhalb des Hohlrades eines Planetengetriebes um das Sonnenrad rotieren. Sie sind über Lager mit einem Planetenträger verbunden, welcher an einer Nabe befestigt ist.
11. "Viskositätsgrad der Ölart" bezeichnet einen Viskositätsgrad gemäß der Definition in SAE J306.
12. "Ab Werk eingefülltes Öl" bezeichnet den Viskositätsgrad der Ölart, die im Werk eingefüllt wird und dazu bestimmt ist, im ersten Wartungsintervall in der Achse zu verbleiben.
13. "Achsenreihe" bezeichnet eine Gruppe von Achsen, die dieselben grundlegenden Achsenfunktionen gemäß der Definition im Familienkonzept teilen.
14. "Achsenfamilie" bezeichnet die von einem Hersteller festgelegte Gruppe von Achsen mit konstruktionsbedingt ähnlichen Eigenschaften in Bezug auf Bauart, CO2-Emissionen und Kraftstoffverbrauch gemäß Anlage 4 dieses Anhangs.
15. "Schleppdrehmoment" bezeichnet das zur Überwindung der inneren Reibung einer Achse notwendige Drehmoment, wenn die Radenden mit einem Ausgangsdrehmoment von 0 Nm frei rotieren.
16. "Spiegelbildliches Achsgehäuse" bezeichnet ein in der Vertikalebene spiegelbildliches Achsgehäuse.
17. "Achseingang" bezeichnet die Seite der Achse, an der das Drehmoment an die Achse abgegeben wird.
18. "Achsausgang" bezeichnet die Seiten der Achse, an denen das Drehmoment an die Räder abgegeben wird.
3. Allgemeine Anforderungen 22
Die Achsgetriebe und alle Lager müssen für die Überprüfung der Achsverluste neu sein, während die Radendlager bereits eingelaufen sein und für mehrere Messungen verwendet werden können.
Auf Ersuchen des Antragstellers können verschiedene Gangübersetzungen in ein und demselben Achsgehäuse unter Verwendung der gleichen Radenden geprüft werden.
Verschiedene Achsübersetzungen von Nabenuntersetzungsachsen (Außenplanetenachsen, Nabenuntersetzungsachsen mit Durchtrieb) und Portalachsen können bereits durch den Austausch der Nabenuntersetzung gemessen werden. Es gelten die in Anlage 4 dieses Anhangs festgelegten Bestimmungen.
Die Gesamtlaufzeit für das optionale Einfahren und die Messung einer einzelnen Achse (das Achsgehäuse und die Radenden ausgenommen) darf 120 Stunden nicht übersteigen.
Zur Prüfung der Verluste einer Achse wird das Kennfeld der Drehmomentverluste für jede Übersetzung einer einzelnen Achse gemessen, wobei die Achsen gemäß den Bestimmungen in Anlage 4 dieses Anhangs Achsenfamilien zugeordnet werden können.
3.1. Einfahren
Auf Ersuchen des Antragstellers kann die Achse einem Einfahrverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einfahrverfahren:
3.1.1. Für das Einfahrverfahren darf ausschließlich ab Werk eingefülltes Öl verwendet werden. Das für das Einfahren benutzte Öl darf nicht für die in Absatz 4 beschriebene Prüfung verwendet werden.
3.1.2. Drehzahl- und Drehmomentverlauf für das Einfahrverfahren werden vom Hersteller festgelegt.
3.1.3. Das Einfahrverfahren ist vom Hersteller im Hinblick auf Laufzeit, Drehzahl, Drehmoment und Öltemperatur zu dokumentieren und der Genehmigungsbehörde mitzuteilen.
3.1.4. Die Anforderungen bezüglich Öltemperatur (4.3.1), Messgenauigkeit (4.4.7) und Prüfanordnung (4.2) gelten nicht für das Einfahrverfahren.
4. Prüfverfahren für Achsen
4.1. Prüfbedingungen
4.1.1. Umgebungstemperatur
Die Temperatur im Prüfraum muss bei 25 °C ± 10 °C liegen. Die Umgebungstemperatur wird in einem Abstand von 1 m zum Achsgehäuse gemessen. Eine erzwungene Erhitzung der Achse darf nur durch ein externes Ölkonditionierungssystem gemäß 4.1.5 vorgenommen werden.
4.1.2. Öltemperatur
Die Öltemperatur ist in der Mitte des Ölsumpfs oder an einer anderen geeigneten Stelle nach den allgemein anerkannten Regeln der Technik zu messen. Bei externer Ölkonditionierung kann die Öltemperatur auch in der vom Achsgehäuse zum Konditioniersystem verlaufenden Auslassleitung in einem Bereich von 5 cm unterhalb des Auslasses gemessen werden. In beiden Fällen darf die Öltemperatur 70 °C nicht überschreiten.
Für die Messung sind nur vom Achsenhersteller empfohlene ab Werk eingefüllte Öle zu verwenden. Wenn verschiedene Gangübersetzungsstufen unter Verwendung ein und desselben Achsgehäuses geprüft werden, muss für jede Einzelmessung des gesamten Achssystems neues Öl eingefüllt werden.
4.1.4. Ölviskosität
Sind verschiedene Öle mit mehreren Viskositätsgraden für die ab Werk eingefüllten Öle angegeben, ist vom Hersteller für die Messungen an der Stammachse das Öl mit dem höchsten Viskositätsgrad zu wählen.
Falls für eine Achsenfamilie mehrere Öle mit demselben Viskositätsgrad als ab Werk eingefülltes Öl angegeben sind, kann der Antragsteller eines dieser Öle für die zur Zertifizierung benötigten Messungen wählen.
4.1.5. Ölstand und Konditionierung
Der Ölstand bzw. die Füllmenge ist auf den in den Wartungsvorschriften des Herstellers angegebenen Höchststand einzustellen.
Ein externes Ölkonditionierungs- und Filtersystem ist erlaubt. Das Achsgehäuse darf für den Einbau des Ölkonditionierungssystems verändert werden.
Das Ölkonditionierungssystem darf entsprechend den allgemein anerkannten Regeln der Technik nicht in einer Weise eingebaut werden, dass die Ölstände einer Achse verändert werden könnten, um so die Effizienz zu steigern oder Antriebsdrehmomente zu erzeugen.
4.2. Prüfanordnung
Zur Messung des Drehmomentverlustes sind verschiedene Prüfanordnungen gemäß den Absätzen 4.2.3 und 4.2.4 erlaubt.
4.2.1. Einbau der Achsen
Handelt es sich um eine Tandemachse, sind beide Achsen jeweils getrennt zu messen. Die erste Achse mit Längsdifferenzial ist zu sperren. Die Ausgangswelle der Durchtriebsachsen muss frei drehbar eingebaut werden.
4.2.2. Einbau von Drehmomentmessern
4.2.2.1. Bei einer Prüfanordnung mit zwei Elektromotoren sind die Drehmomentmesser am Eingangsflansch und an einem Radende anzubringen, während das andere Ende gesperrt ist.
4.2.2.2. Bei einer Prüfanordnung mit drei Elektromotoren sind die Drehmomentmesser am Eingangsflansch und an jedem Radende anzubringen.
4.2.2.3. Halbwellen unterschiedlicher Länge sind in einer Prüfanordnung mit zwei Motoren gestattet, um das Differenzial zu sperren und so zu gewährleisten, dass beide Radenden sich drehen.
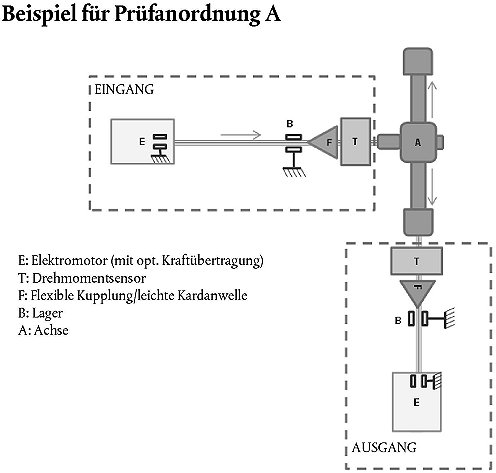
4.2.3. Prüfanordnung "Typ A" 22
Eine Prüfanordnung "Typ A" besteht aus einem Prüfstand auf der Seite des Achseingangs und mindestens einem Prüfstand auf der/den Seite/n des Achsausgangs. Geräte zur Messung des Drehmoments sind an der oder den Achseingangs- und Achsausgangsseiten anzubringen. Bei Prüfanordnungen vom Typ A mit nur einem Prüfstand an der Ausgangsseite muss das frei drehende Ende der Achse drehbar mit dem anderen Ende an der Ausgangsseite verriegelt werden (z.B. durch eine aktivierte Differenzialsperre oder durch eine andere mechanische Differenzialsperre, die nur für die Messung eingesetzt wird).
Um parasitäre Verluste durch die Prüfanordnung zu vermeiden, sind die Geräte zur Drehmomentmessung möglichst nahe an der oder den Achseingangs- und Ausgangsseiten anzubringen und durch passende Lager zu stützen.
Zusätzlich können die Drehmomentsensoren von den parasitären Lasten der Wellen mechanisch entkoppelt werden, beispielsweise durch Einbau zusätzlicher Lager und einer elastischen Kupplung oder einer Leichtbaukardanwelle zwischen den Sensoren und einem dieser Lager. Abbildung 1 zeigt ein Beispiel für eine Prüfanordnung des Typs A mit zwei Prüfständen.
Für die Konfiguration von Prüfanordnungen des Typs A muss der Hersteller eine Analyse der parasitären Lasten zur Verfügung stellen. Auf Grundlage dieser Analyse entscheidet die Genehmigungsbehörde über den maximalen Einfluss der parasitären Lasten. Der Wert ipara darf jedoch nicht niedriger als 10 % sein.
Abbildung 1
Beispiel für eine Prüfanordnung "Typ A"
4.2.4. Prüfanordnung "Typ B"
Jede andere Konfiguration einer Prüfanordnung wird als Prüfanordnung "Typ B" bezeichnet. Der maximale Einfluss der parasitären Lasten ipara für diese Konfigurationen ist auf 100 % einzustellen.
Niedrigere Werte für ipara sind in Absprache mit der Genehmigungsbehörde zulässig.
Um das Kennfeld der Drehmomentverluste einer Achse zu ermitteln, sind deren grundlegende Daten gemäß Absatz 4.4 zu messen und zu berechnen. Die Ergebnisse für die Drehmomentverluste müssen gemäß Nummer 4.4.8 ergänzt und gemäß Anlage 6 formatiert werden, um die weitere Verarbeitung durch das Simulationsinstrument zu ermöglichen.
Die Anlagen des Kalibrierlabors müssen die Anforderungen der IATF 16949, ISO-9000-Reihen oder der ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale und internationale Prüfnormen zurückführbar sein.
4.3.1.1. Drehmomentmessung
Die Unsicherheit der Drehmomentmessung ist gemäß Absatz 4.4.7 zu berechnen und einzubeziehen.
Die Abtastrate der Drehmomentsensoren muss 4.3.2.1 entsprechen.
4.3.1.2. Drehgeschwindigkeit
Die Unsicherheit der Drehgeschwindigkeitssensoren zur Messung der Eingangs- und der Ausgangsdrehzahl darf ± 2 U/min nicht überschreiten.
4.3.1.3. Temperaturen
Die Unsicherheit der Temperatursensoren zur Messung der Umgebungstemperatur darf ± 1 °C nicht überschreiten.
Die Unsicherheit der Temperatursensoren zur Messung der Öltemperatur darf ± 0,5 °C nicht überschreiten.
4.3.2. Messsignale und Datenaufzeichnung 22
Zum Zweck der Berechnung der Drehmomentverluste sind die folgenden Signale aufzuzeichnen:
- Eingangs- und Ausgangsdrehmoment [Nm]
- Eingangs- und/oder Ausgangsdrehzahl [U/min]
- Umgebungstemperatur [°C]
- Öltemperatur [°C]
- Temperatur am Drehmomentsensor [C] (optional)
4.3.2.1. Es gelten folgende Mindestabtastfrequenzen der Sensoren:
Drehmoment: 1 kHz
Drehgeschwindigkeit: 200 Hz
Temperaturen: 10 Hz
4.3.2.2. Die Datenaufzeichnungsrate zur Bestimmung der arithmetischen Mittelwerte eines jeden Rasterpunkts muss 10 Hz oder höher sein. Rohdaten müssen nicht mitgeteilt werden.
Eine Signalfilterung kann in Absprache mit der Genehmigungsbehörde angewandt werden. Aliasing-Effekte jeglicher Art sind zu vermeiden.
Der Umfang des zu messenden Kennfelds der Drehmomentverluste ist beschränkt auf:
- ein Ausgangsdrehmoment von 10 kNm für schwere Lastkraftwagen und schwere Busse bzw. 2 kNm für mittelschwere Lastkraftwagen
- oder ein Eingangsdrehmoment von 5 kNm für schwere Lastkraftwagen und schwere Busse bzw. 1 kNm für mittelschwere Lastkraftwagen;
- oder die maximale Motorleistung, die vom Hersteller für eine bestimmte Achse toleriert wird, oder im Falle mehrerer Antriebsachsen die maximale Motorleistung entsprechend der nominalen Leistungsverteilung.
4.3.3.1. Der Hersteller kann die Messung auf ein Ausgangsdrehmoment von bis zu 20 kNm ausweiten, indem er eine lineare Extrapolation der Drehmomentverluste vornimmt oder Messungen mit einem Ausgangsdrehmoment von bis zu 20 kNm in Stufen von 2.000 Nm durchführt. Für diesen zusätzlichen Drehmomentbereich sind ein weiterer Drehmomentsensor auf Ausgangsseite mit einem maximalen Drehmoment von 20 kNm (bei einer Anordnung mit zwei Motoren) oder zwei 10 kNm-Sensoren (bei einer Anordnung mit drei Motoren) zu verwenden.
Wenn der Durchmesser des kleinsten Reifens (z.B. aufgrund einer Produktentwicklung) nach Abschluss der Messung einer Achse verringert wird oder wenn die physischen Grenzen des Prüfstandes erreicht sind (z.B. durch entwicklungsbedingte Änderungen des Produkts), kann der Hersteller die fehlenden Punkte aus dem vorhandenen Kennfeld extrapolieren. Die extrapolierten Punkte dürfen nicht mehr als 10 % aller Punkte in dem Kennfeld darstellen, und für diese Punkte ist ein Drehmomentverlust von 5 % als Straffaktor zu den extrapolierten Punkten zu addieren.
4.3.3.2. Zu messende Ausgangsdrehmomentstufen für schwere Lastkraftwagen und schwere Busse:
250 Nm < Tout < 1.000 Nm: Stufen von 250 Nm 1.000 Nm ≤ Tout ≤ 2.000 Nm: Stufen von 500 Nm 2.000 Nm ≤ Tout ≤ 10.000 Nm: Stufen von 1.000 Nm Tout > 10.000 Nm: Stufen von 2.000 Nm Zu messende Ausgangsdrehmomentstufen für mittelschwere Lastkraftwagen: 50 Nm < Tout < 200 Nm: Stufen von 50 Nm 200 Nm ≤ Tout ≤ 400 Nm: Stufen von 100 Nm 400 Nm ≤ Tout ≤ 2.000 Nm: Stufen von 200 Nm Tout > 2.000 Nm: Stufen von 400 Nm
4.3.4. Drehzahlbereich
Der Prüfdrehzahlbereich muss zwischen einer Raddrehzahl von 50 U/min und der maximalen Drehzahl liegen. Die zu messende maximale Prüfdrehzahl ist entweder durch die maximale Achseingangsdrehzahl oder die maximale Raddrehzahl definiert, abhängig davon, welche der folgenden Bedingungen zuerst erfüllt ist:
4.3.4.1. Die anwendbare maximale Achseingangsdrehzahl ist möglicherweise durch die Bauartspezifikation der Achse begrenzt.
4.3.4.2. Die maximale Raddrehzahl wird für den kleinsten anwendbaren Reifendurchmesser bei einer Fahrzeuggeschwindigkeit von 90 km/h für mittelschwere und schwere Lastkraftwagen und von 110 km/h für schwere Busse berechnet. Ist der kleinste anwendbare Reifendurchmesser nicht definiert, findet Absatz 4.3.4.1 Anwendung.
4.3.5. Zu messende Raddrehzahlstufen 22
Für die Prüfung ist ein Raddrehzahlstufen-Intervall von 50 U/min für schwere Lastkraftwagen und schwere Busse und von 100 U/min für mittelschwere Lastkraftwagen zu verwenden. Die Messung von Übergangs-Drehzahlstufen ist zulässig.
4.4. Messung des Kennfelds der Drehmomentverluste für Achsen
4.4.1. Prüfsequenz für das Kennfeld der Drehmomentverluste 19 22
Für jede Drehzahlstufe ist der Drehmomentverlust für die einzelnen Ausgangsdrehmomentstufen beginnend vom niedrigsten Drehmomentwert aufwärts bis zum Maximalwert sowie abwärts bis zum Mindestwert zu messen. Die Folge der Drehzahlstufen kann beliebig sein. Die Messsequenz für das Drehmoment ist zweimal durchzuführen und aufzuzeichnen.
Eine Unterbrechung der Sequenz für den Zweck der Kühlung oder Erwärmung ist zulässig.
Die Messdauer für jeden einzelnen Rasterpunkt muss mindestens 5 und höchsten 20 Sekunden betragen.
4.4.3. Mittelung der Rasterpunkte 19
Die innerhalb des in Nummer 4.4.2 angegebenen Intervalls von 5 bis 20 Sekunden aufgezeichneten Werte für jeden Rasterpunkt sind arithmetisch zu mitteln.
Aus allen vier gemittelten Intervallen der einander entsprechenden Drehzahl- und Drehmoment-Rasterpunkte der beiden jeweils aufwärts und abwärts durchgeführten Messfolgen ist ein arithmetisches Mittel zu bilden, das einen einzelnen Wert für den Drehmomentverlust ergibt.
4.4.4. Der Drehmomentverlust (auf Eingangsseite) der Achse ist wie folgt zu berechnen:
dabei gilt:
| Tloss, | = Drehmomentverlust der Achse auf Eingangsseite [Nm] |
| Tin | = Eingangsdrehmoment [Nm] |
| igear | = Achsgetriebeübersetzung [-] |
| Tout | = Ausgangsdrehmoment [Nm] |
4.4.5. Validierung der Messung 19
4.4.5.1. Die gemittelten Drehzahlwerte pro Rasterpunkt (Intervall von 5 bis 20 s) dürfen für die Ausgangsdrehzahl nicht mehr als ± 5 U/min von den Einstellwerten abweichen.
4.4.5.2. Die gemäß 4.4.3 gemittelten Ausgangsdrehmoment-Werte für jeden Rasterpunkt dürfen nicht mehr als ± 20 Nm oder ± 1 % (je nachdem, welcher Wert höher ist) vom Drehmoment-Sollwert für den betreffenden Rasterpunkt abweichen.
4.4.5.3. Werden die oben stehenden Kriterien nicht erfüllt, ist die Messung ungültig. In diesem Fall muss die Messung für die gesamte betreffende Drehzahlstufe wiederholt werden. Wenn die wiederholte Messung gültig ist, sind die Daten zu konsolidieren.
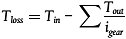
4.4.6. Berechnung der Unsicherheit 22
Die Gesamtunsicherheit UT,loss des Drehmomentverlustes ist auf Grundlage der folgenden Parameter zu berechnen:
- Temperatureffekt
- Parasitäre Lasten
- Unsicherheit (einschließlich Empfindlichkeitstoleranz, Linearität, Hysterese und Wiederholbarkeit)
Die Gesamtunsicherheit des Drehmomentverlustes (UT,loss) beruht auf den Unsicherheiten der Sensoren mit einem Konfidenzniveau von 95 %. Die Berechnung erfolgt für jeden verwendeten Sensor (z.B. bei einer Anordnung mit drei Motoren: UT,in, UT,out,1, UT,out,2) als Quadratwurzel der Summe der Quadrate ("Gaußsches Fehlerfortpflanzungsgesetz").
dabei gilt:
| UT,in/out | = | Unsicherheit der Messung des Eingangs-/Ausgangsdrehmomentverlustes, getrennt für Eingangs- und Ausgangsdrehmoment; [Nm] |
| igear | = | Achsgetriebeübersetzung [-] |
| UTKC | = | Unsicherheit durch den Temperatureinfluss auf das aktuelle Drehmomentsignal; [Nm] |
| wtkc | = | Temperatureinfluss auf das aktuelle Drehmomentsignal pro Kref, vom Sensorhersteller angegeben; [%] |
| UUTK0 | = | Unsicherheit durch den Temperatureinfluss auf das Nulldrehmomentsignal (bezogen auf das Nenndrehmoment); [Nm] |
| wtk0 | = | Temperatureinfluss auf das Nulldrehmomentsignal pro Kref (bezogen auf das Nenndrehmoment), vom Sensorhersteller angegeben; [%] |
| Kref | = | Bezugstemperatur-Messbereichsgrenze für tkc und tk0, vom Sensorhersteller angegeben; °C] |
| Δ K | = | absolute Differenz der am Drehmomentsensor zwischen der Kalibrierung und der Messung gemessenen Sensortemperatur; kann die Sensortemperatur nicht gemessen werden, ist der Standardwert Δ K = 15 zu verwenden; °C] |
| Tc | = | aktueller/gemessener Drehmomentwert am Drehmomentsensor; [Nm] |
| Tn | = | Drehmomentnennwert des Drehmomentsensors; [Nm] |
| Ucal | = | Unsicherheit durch die Kalibrierung des Drehmomentsensors; [Nm] |
| wcal | = | relative Kalibrierungsunsicherheit (bezogen auf das Nenndrehmoment); [%] |
| kcal | = | Kalibrierfaktor (falls vom Sensorhersteller angegeben, andernfalls = 1) |
| Upara | = | Unsicherheit durch parasitäre Lasten; [Nm] |
| wpara | = | senspara * ipara
relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden |
| senspara | = | maximaler Einfluss parasitärer Lasten für einen gegebenen Drehmomentsensor, vom Sensorhersteller angegeben, [%]; wird vom Sensorhersteller kein bestimmter Wert für die parasitären Lasten angegeben, ist der Wert auf 1,0 % einzustellen |
| ipara | = | maximaler Einfluss parasitärer Lasten für einen gegebenen Drehmomentsensor abhängig von der Prüfanordnung wie in den Abschnitten 4.2.3 und 4.2.4 dieses Anhangs angegeben |
4.4.7. Bewertung der Gesamtunsicherheit des Drehmomentverlustes 22
Falls die berechneten Unsicherheiten UT,in/out unter den folgenden Grenzwerten liegen, ist davon auszugehen, dass der gemeldete Drehmomentverlust Tloss,rep mit dem gemessenen Drehmomentverlust Tloss übereinstimmt.
UT,in: 7,5 Nm oder 0,25 % des gemessenen Drehmoments, abhängig davon, welcher zulässige Unsicherheitswert höher ist
Für Prüfanordnungen mit einem Prüfstand an der Ausgangsseite:
UT,out: 15 Nm oder 0,25 % des gemessenen Drehmoments, abhängig davon, welcher zulässige Unsicherheitswert höher ist
Für Prüfanordnungen mit zwei Prüfständen an jeder Ausgangsseite:
UT,out: 7,5 Nm oder 0,25 % des gemessenen Drehmoments, abhängig davon, welcher zulässige Unsicherheitswert höher ist
Falls die berechneten Unsicherheiten höher sind, ist der Teil der berechneten Unsicherheit, der die oben stehenden Grenzwerte überschreitet, zu Tloss für den gemeldeten Drehmomentverlust Tloss,rep wie folgt hinzuzurechnen:
Falls die Grenzwerte von UT,in überschritten werden:
T loss,rep =T loss +Δ UT in
Δ U T,in =MIN((U T,in -0,25 % ×T c)oderr (U T,in -7,5 Nm ))
Falls die Grenzwerte von UT,out überschritten werden:
T loss,rep =T loss +Δ U T,out / igear
Für Prüfanordnungen mit einem Prüfstand an der Ausgangsseite:
Δ U T,out =MIN((U T,out -0,25 % ×T c) oder (U T,out -15 Nm ))
Für Prüfanordnungen mit zwei Prüfständen an jeder Ausgangsseite:
![]()
Δ U T,out_1 =MIN((U T,out_1 -0,25 % × Tc) oder (U T,out_1 -7,5Nm ))
Δ U T,out_2 =MIN((U T,out_1 -0,25 % × Tc) oder (U T,out_1 -7,5Nm ))
Dabei gilt:
UT,in/out = Unsicherheit der Messung des Eingangs-/Ausgangsdrehmomentverlustes, getrennt für Eingangs- und Ausgangsdrehmoment; [Nm]
igear = Achsübersetzung [-]
Δ UT = der Teil der berechneten Unsicherheit, der die angegebenen Grenzwerte überschreitet
4.4.8. Ergänzung der Daten für das Kennfeld der Drehmomentverluste 19
4.4.8.1. Wenn die Drehmomentwerte den Grenzwert des oberen Bereichs überschreiten, ist eine lineare Extrapolation durchzuführen. Für die Extrapolation ist die Steigung der linearen Regression auf Basis aller für die entsprechende Drehzahlstufe gemessenen Drehmomentpunkte zu verwenden.
4.4.8.2. Für Werte des Ausgangsdrehmomentbereichs unter dem niedrigsten gemessenen Rasterpunkt gemäß Nummer 4.3.3.2 müssen die Drehmomentverlustwerte des niedrigsten gemessenen Rasterpunkts verwendet werden.
4.4.8.3. Bei einer Raddrehzahl von 0 U/min sind die Drehmomentverlustwerte der Drehzahlstufe 50 U/min zu verwenden.
4.4.8.4. Bei negativen Eingangsdrehmomenten (z.B. Schiebebetrieb, Freilauf) ist der Wert des Drehmomentverlustes zu verwenden, der für das betreffende positive Eingangsdrehmoment gemessen wird.
4.4.8.5. Bei einer Tandemachse ist das kombinierte Kennfeld der Drehmomentverluste für beide Achsen anhand der Prüfergebnisse für die einzelnen Achsen an der Eingangsseite zu berechnen. Auch die Eingangsdrehmomentwerte sind hinzuzufügen.
T loss,rep,tdm = T loss,rep, 1 + T loss,rep, 2
T in,tdm = Tin, 1 + Tin, 2
5. Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften
5.1. Jeder im Einklang mit diesem Anhang genehmigte Achsentyp muss in der Weise hergestellt werden, dass er im Hinblick auf die Beschreibung im Zertifizierungsformular und dessen Anlagen mit dem genehmigten Typ übereinstimmt. Die Verfahren zur Überprüfung der Übereinstimmung der für die zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften müssen mit denen in Artikel 31 der Verordnung (EU) 2018/858 übereinstimmen.
5.2. Die Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist auf Grundlage der Angaben in der in Anlage 1 dieses Anhangs beschriebenen Bescheinigung und der im vorliegenden Absatz aufgeführten besonderen Bedingungen zu überprüfen.
5.3. Vom Hersteller ist jährlich mindestens die in Tabelle 1 angegebene Anzahl von Achsen auf der Grundlage der jährlichen Produktionszahlen zu prüfen. Bei der Festlegung der Produktionszahlen sind nur Achsen zu berücksichtigen, für die die Anforderungen der vorliegenden Verordnung gelten.
5.4. Jede vom Hersteller geprüfte Achse muss für eine bestimmte Achsenfamilie repräsentativ sein.
5.5. Die Anzahl der Familien von einfach untersetzten Achsen und anderen Achsen, für die Prüfungen durchgeführt werden müssen, ist Tabelle 1 zu entnehmen.
Tabelle 1 Stichprobengröße für die Konformitätsprüfung
| Produktionszahlen | Anzahl der Prüfungen für einfach untersetzte Achsen | Anzahl der Prüfungen für andere Achsen (ohne einfach untersetzte Achsen) |
| 0 - 40.000 | 2 | 1 |
| 40.001 - 50.000 | 2 | 2 |
| 50.001 - 60.000 | 3 | 2 |
| 60.001 - 70.000 | 4 | 2 |
| 70.001 - 80.000 | 5 | 2 |
| 80.001 und mehr | 5 | 3 |
5.6. Die beiden Achsenfamilien mit den höchsten Produktionsvolumen müssen immer geprüft werden. Der Hersteller muss die Anzahl der durchgeführten Prüfungen und die Auswahl der Familien gegenüber der Genehmigungsbehörde nachweisen (z.B. durch Angabe der Umsatzzahlen). Die restlichen Familien, für die Prüfungen durchzuführen sind, werden zwischen dem Hersteller und der Genehmigungsbehörde vereinbart.
5.7. Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ermittelt die Genehmigungsbehörde in Absprache mit dem Hersteller den bzw. die zu prüfenden Achsentypen. Die Genehmigungsbehörde stellt sicher, dass die ausgewählte(n) Achsentypen gemäß denselben Standards wie für die Serienproduktion hergestellt werden.
5.8. Wenn das Ergebnis einer gemäß Nummer 6 durchgeführten Prüfung die in Nummer 6.4 angegebenen Werte überschreitet, müssen drei weitere Achsen derselben Familie geprüft werden. Wenn mindestens eine dieser Achsen die Prüfung nicht besteht, gelten die Bestimmungen in Artikel 23.
6. Überprüfung der Übereinstimmung der Produktion
6.1. Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist in vorheriger Absprache zwischen der Genehmigungsbehörde und dem Antragsteller eines der folgenden Verfahren anzuwenden:
- Die Messung des Drehmomentverlustes gemäß diesem Anhang unter Anwendung des vollständigen Verfahrens wird auf die in Absatz 6.2 beschriebenen Rasterpunkte begrenzt.
- Die Messung des Drehmomentverlustes gemäß diesem Anhang unter Anwendung des vollständigen Verfahrens wird auf die in Absatz 6.2 beschriebenen Rasterpunkte begrenzt, mit Ausnahme des Einfahrverfahrens. Zur Berücksichtigung der Einfahreigenschaften einer Achse kann ein Korrekturfaktor angewandt werden. Dieser Faktor ist nach bestem technischem Ermessen in Absprache mit der Genehmigungsbehörde festzulegen.
- Messung des Schleppdrehmoments gemäß Absatz 6.3. Der Hersteller kann ein Einfahrverfahren nach bestem technischem Ermessen von bis zu 100 Stunden wählen.
6.2. Erfolgt die Bewertung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gemäß Absatz 6.1 Buchstabe a oder b, sind die Rasterpunkte für diese Messung auf vier Rasterpunkte aus dem genehmigten Kennfeld der Drehmomentverluste begrenzt.
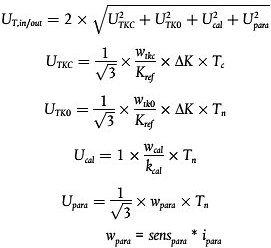
6.2.1. Zu diesem Zweck ist das komplette Kennfeld der Drehmomentverluste der Achse, die zur Überstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften zu prüfen ist, in drei abstandsgleiche Drehzahlbereiche und in drei Drehmomentbereiche zu unterteilen, um neun Kontrollbereiche zu definieren (siehe Abbildung 2).
Abbildung 2 Drehzahl- und Drehmomentbereiche zur Überprüfung der Übereinstimmung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden zertifizierten Eigenschaften 19
6.2.2. Für vier Kontrollbereiche ist gemäß dem vollständigen Verfahren ein einzelner Punkt auszuwählen, zu messen und auszuwerten, wie in Absatz 4.4 beschrieben. Jeder Kontrollpunkt ist wie folgt auszuwählen:
- Die Kontrollbereiche sind abhängig von der Achsenreihe auszuwählen:
- einfach untersetzte Achsen einschließlich Tandemkombinationen: Kontrollbereiche 5, 6, 8 und 9.
- Nabenuntersetzungsachsen einschließlich Tandemkombinationen: Kontrollbereiche 2, 3, 4 und 5.
- Der ausgewählte Punkt muss in der Mitte des Bereichs liegen, der sich auf den Drehzahlbereich und den anwendbaren Drehmomentbereich für die betreffende Drehzahl bezieht.
- Um einen korrespondierenden Punkt für den Vergleich mit dem für die Zertifizierung gemessenen Kennfeld der Verluste zu erhalten, ist der ausgewählte Punkt zu dem am nächsten liegenden gemessenen Punkt aus dem genehmigten Kennfeld zu verschieben. Liegt der gewählte Punkt in der Mitte zwischen zwei genehmigten Punkten, so ist der höhere Punkt zu verwenden.
6.2.3. Für jeden gemessenen Punkt zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften und dessen korrespondierenden Punkt dem typgenehmigten Kennfeld wird die Effizienz wie folgt berechnet:
ηi = Tout / (iaxle × Tin)
dabei gilt:
| ηi | = Effizienz des Rasterpunkts aus den einzelnen Kontrollbereichen 1 bis 9 |
| Tout | = Ausgangsdrehmoment [Nm] |
| Tin | = Eingangsdrehmoment [Nm] |
| iaxle | = Achsübersetzung [-] |
6.2.4. Die durchschnittliche Effizienz des Kontrollbereichs ist wie folgt zu berechnen:
Für einfach untersetzte Achsen:
Für Nabenuntersetzungsachsen:
dabei gilt:
| ηavr,low speed | = durchschnittliche Effizienz für niedrige Drehzahl |
| ηavr,mid speed | = durchschnittliche Effizienz für mittlere Drehzahl |
| ηavr,high speed | = durchschnittliche Effizienz für hohe Drehzahl |
| ηavr,total | = vereinfachte gemittelte Effizienz für die Achse |
6.2.5. Erfolgt die Bewertung der Übereinstimmung der für die CO-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gemäß Absatz 6.1 Buchstabe c, ist das Schleppdrehmoment der Stammachse der Familien, der die geprüfte Achse angehört, während der Zertifizierung zu bestimmen. Dies kann vor oder nach dem Einfahrverfahren gemäß Nummer 3.1 oder durch Extrapolation aller Werte des Kennfelds der Drehmomente für jede Drehzahlstufe bis hinunter zu 0 Nm durchgeführt werden. Die Extrapolation erfolgt linear oder durch ein Polynom zweiter Ordnung, je nachdem, welche Standardabweichung geringer ist.
6.3. Bestimmung des Schleppdrehmoments
6.3.1. Zur Bestimmung des Schleppdrehmoments einer Achse ist eine vereinfachte Prüfanordnung mit nur einem Elektromotor und nur einem Drehmomentsensor auf der Eingangsseite erforderlich. Bei einer Portalachse mit unterschiedlicher Länge der beiden Ausgangswellen ist auch ein Prüfaufbau mit zwei elektrischen Maschinen und zwei Drehmomentsensoren an jedem Ausgang zulässig. Dabei werden beide Ausgangswellen synchron in Fahrtrichtung angetrieben. Das endgültige Schleppdrehmoment ergibt sich aus der Summe der beiden Ausgangsdrehmomente.
6.3.2. Es gelten die Prüfbedingungen gemäß Absatz 4.1. Die auf das Drehmoment bezogene Unsicherheitsberechnung kann entfallen.
6.3.3. Die Messung des Schleppdrehmoments ist innerhalb des Drehzahlbereichs des genehmigten Typs gemäß Absatz 4.3.4 unter Berücksichtigung der in 4.3.5 genannten Drehzahlstufen durchzuführen.
6.4. Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften 19
6.4.1. Die Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist erfolgreich, wenn eine der folgenden Bedingungen erfüllt ist:
- Wird eine Messung des Drehmomentverlustes gemäß Nummer 6.1 Buchstabe a oder b durchgeführt, darf die durchschnittliche Effizienz einer Achse, die während der Überprüfung der Übereinstimmung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden zertifizierten Eigenschaften geprüft wurde, bei einfach untersetzten Achsen nicht niedriger als 1,5 % und bei allen anderen Achsenreihen nicht niedriger als 2,0 % unter der entsprechenden durchschnittlichen Effizienz der typgenehmigten Achse liegen.
- Wird eine Messung des Schleppdrehmoments gemäß Nummer 6.1 Buchstabe c durchgeführt, so muss das Schleppdrehmoment einer Achse, die während der Überprüfung der Übereinstimmung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden zertifizierten Eigenschaften geprüft wurde, niedriger sein als das entsprechende Schleppdrehmoment der typgenehmigten Achse oder innerhalb der in Tabelle 2 angegebenen Toleranz liegen.
| Achsenreihe | Toleranzen für Achsen, gemessen bei Überprüfung der Übereinstimmung der Produktion nach Einfahren Vergleich mit Td0 | Toleranzen für Achsen, gemessen bei Überprüfung der Übereinstimmung der Produktion ohne Einfahren Vergleich mit Td0 | ||||||
| für i | Toleranz Td0_Eingang [Nm] | für i | Toleranz Td0_Eingang [Nm] | für i | Toleranz Td0_Eingang [Nm] | für i | Toleranz Td0_Eingang [Nm] | |
| SR | ≤ 3 | 10 | > 3 | 9 | > 3 | 16 | > 3 | 15 |
| SRT | ≤ 3 | 11 | > 3 | 10 | > 3 | 18 | > 3 | 16 |
| SP | ≤ 6 | 11 | > 6 | 10 | > 6 | 18 | > 6 | 16 |
| HR | ≤ 7 | 15 | > 7 | 12 | > 7 | 25 | > 7 | 20 |
| HRT | ≤ 7 | 16 | > 7 | 13 | > 7 | 27 | > 7 | 21 |
| i = Gangübersetzung"; | ||||||||
| Muster der Bescheinigung für ein Bauteil, eine selbstständige technische Einheit oder ein System | Anlage 1 |
Größtformat: A4 (210 × 297 mm)
Bescheinigung über die Eigenschaften einer Achsenfamilie in bezug auf die CO2-Emissionen und den Kraftstoffverbrauch
| Mitteilung über: |
|
einer Bescheinigung über die Eigenschaften einer Achsenfamilie in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch gemäß Verordnung (EU) 2017/2400
Verordnung (EU) 2017/2400 der Kommission, zuletzt geändert durch ...
Nummer der Bescheinigung:
Hash:
Grund für die Erweiterung:
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Typ:
0.3. Merkmale zur Typidentifizierung, sofern an der Achse vorhanden:
0.3.1. Anbringungsstelle dieser Kennzeichnung:
0.4. Name und Anschrift des Herstellers:
0.5. Bei Bauteilen und selbstständigen technischen Einheiten Lage und Anbringungsart des EG-Zertifizierungszeichens:
0.6. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.7. (Ggf.) Name und Anschrift des Bevollmächtigten des Herstellers:
1. Zusätzliche Angaben (falls zutreffend): siehe Beiblatt
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts:
4. Nummer des Prüfberichts:
5. Gegebenenfalls Bemerkungen: siehe Beiblatt
6. Ort:
7. Datum:
8. Unterschrift:
Anlage:
- Beschreibungsbogen
- Prüfbericht
| Achsen-Beschreibungsbogen | Anlage 2 19 |
|
| |
| Beschreibungsbogen Nr.: | Gegenstand:
Ausstellungsdatum: Datum der Änderung |
gemäß ...
Achstyp/-familie (falls zutreffend):
...
0. Allgemeines
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers):
0.3. Achstyp:
0.4. Achsenfamilie (falls zutreffend):
0.5. Achstyp als selbstständige technische Einheit / Achsenfamilie als selbstständige technische Einheit
0.6. Handelsname(n) (sofern vorhanden):
0.7. Merkmale zur Typidentifizierung, sofern an der Achse vorhanden:
0.8. Bei Bauteilen und selbstständigen technischen Einheiten Anbringungsstelle und Anbringungsart des Zertifizierungszeichens:
0.9. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
Teil 1
Wesentliche Merkmale der (Stamm-)Achse und der Achs-Typen in der Achsenfamilie 19 22
 | ||||||
| 0.0. - gestrichen - | ||||||
| 0.1. - gestrichen - | ||||||
| 0.2. - gestrichen - | ||||||
| 0.3. - gestrichen - | ||||||
| 0.4. - gestrichen - | ||||||
| 0.5. - gestrichen - | ||||||
| 0.6. - gestrichen - | ||||||
| 0.7. - gestrichen - | ||||||
| 0.8. - gestrichen - | ||||||
| 0.9. - gestrichen - | ||||||
| 1.0. Einzelangaben über die Achse | ||||||
| 1.1 Achslinie (SR, HR, SP, SRT, HRT) |
... |
... |
... |
... | ||
| 1.2 Achsenübersetzung |
... |
... |
... |
... | ||
| 1.3 Achsgehäuse (Zeichnung) |
... |
... |
... |
... | ||
| 1.4 Getriebespezifikationen |
... |
... |
... | |||
| 1.4.1 Kronenrad-Durchmesser; [mm] |
... |
... | ||||
| 1.4.2 Vertikaler Versatz Ritzel / Kronenrad; [mm] |
... | |||||
| 1.4.3. Ritzel: Winkel zur horizontalen Ebene; [°] | ||||||
1.4.4. nur bei Portalachsen:
Winkel zwischen Ritzel-Achse und Kronenrad-Achse; [°] | ||||||
| 1.4.5. Anzahl der Zähne Getrieberad | ||||||
| 1.4.6. Anzahl der Zähne Kronenrad | ||||||
| 1.4.7. Horizontaler Versatz des Ritzels; [mm] | ||||||
| 1.4.8. Horizontaler Versatz Getrieberad / Tellerrad; [mm] | ||||||
| 1.5. Ölvolumen (Ölvolumina); [cm3] | ||||||
| 1.6. Ölstand (Ölstände); [mm] | ||||||
| 1.7. Öl-Spezifikationen | ||||||
| 1.8. Lagertyp (Art, Anzahl, Innendurchmesser, Außendurchmesser, Breite und Zeichnung) | ||||||
| 1.9. Dichtungstyp (Hauptdurchmesser, Lippenanzahl); [mm] | ||||||
| 1.10. Radenden (Zeichnung) | ||||||
| 1.10.1. Lagertyp (Art, Anzahl, Innendurchmesser, Außendurchmesser, Breite und Zeichnung) | ||||||
| 1.10.2. Dichtungstyp (Hauptdurchmesser, Lippenanzahl); [mm] | ||||||
| 1.10.3. Schmiermitteltyp | ||||||
| 1.11. Anzahl der Planeten-/Zahnradgetriebe für den Differenzialträger | ||||||
| 1.12. Kleinste Breite des Planeten-/Zahnradgetriebes für den Differenzialträger; [mm] | ||||||
| 1.13. Getriebeübersetzung der Nabenuntersetzung | ||||||
Liste der Anlagen
| Nr. | Beschreibung: | Ausstellungsdatum: |
| 1 | ... | ... |
| 2 | ... |
| Berechnung des Standard-Drehmomentverlusts | Anlage 3 22 |
Die Standard-Drehmomentverluste für Achsen sind in Tabelle 1 aufgeführt. Die Standardwerte der Tabelle bestehen aus der Summe eines Wertes des allgemeinen konstanten Wirkungsgrads zur Abbildung der lastabhängigen Verluste und einem allgemeinen Wert für den Schleppverlust zur Abbildung der Schleppverluste bei geringer Last.
Durchtriebsachsen werden anhand einer kombinierten Effizienz für eine Achse einschließlich Durchtrieb (SRT, HRT) zuzüglich der zughörigen Einzelachse (SR, HR) berechnet.
Tabelle 1 Allgemeiner Wirkungsgrad und Schleppverlust
| Grundfunktion | Allgemeiner Wirkungsgrad η | Schleppdrehmoment (Radseite) Td0 = T0 + T1 × igear |
| Einfach untersetzte Achse (SR) | 0,98 | T0 = 70 Nm 1 = 20 Nm |
| Einfach untersetzte Durchtriebsachse (SRT) / Portalachse (SP) | 0,96 | T0 = 80 Nm T1 = 20 Nm |
| Nabenuntersetzungsachse (HR) | 0,97 | T0 = 70 Nm T1 = 20 Nm |
| Nabenuntersetzungsachse mit Durchtrieb (HRT) | 0,95 | T0 = 90 Nm T1 = 20 Nm |
| Alle anderen Achstechnologien | 0,90 | T0 = 150 Nm T1 = 50 Nm |
Der allgemeine Schleppverlust (Radseite) Td0 wird mit folgender Formel berechnet:
Td0 = T0 + T1 × igear
wobei die Werte aus Tabelle 1 verwendet werden.
Der Standard-Drehmomentverlust Tloss,std auf der Eingangsseite der Achse wird mit folgender Formel berechnet:
Dabei gilt:
| Tloss,std | = Standard-Drehmomentverlust auf der Eingangsseite [Nm] |
| Td0 | = Allgemeiner Schleppverlust über den gesamten Drehzahlbereich [Nm] |
| igear | = Achsübersetzung [-] |
| η | = allgemeiner Wirkungsgrad bei lastabhängigen Verlusten [-] |
| Tout | = Ausgangsdrehmoment [Nm] |
Das entsprechende Drehmoment (auf Eingangsseite) der Achse ist wie folgt zu berechnen:
Dabei gilt:
| Tin = Eingangsdrehmoment [Nm] |
| Familienkonzept | Anlage 4 19 |
1. Der Antragsteller legt der Genehmigungsbehörde einen Antrag auf Erteilung einer Bescheinigung für eine Achsenfamilie im Sinne der in Absatz 3 genannten Kriterien vor.
Eine Achsenfamilie ist durch ihre Konstruktions- und Leistungsparameter bestimmt. Diese müssen für alle Achsen einer Familie die gleichen sein. Welche Achsen zu einer Familie gehören, kann der Achsenhersteller nach eigenem Ermessen festlegen, solange er sich dabei an die Vorschriften von Absatz 4 hält. Zusätzlich zu den in Absatz 4 aufgeführten Parametern kann der Hersteller weitere Kriterien für die Festlegung kleinerer Achsenfamilien einführen. Diese Parameter sind nicht unbedingt solche, die sich auf das Leistungsniveau auswirken. Die Achsenfamilie ist von der Genehmigungsbehörde zu genehmigen. Der Hersteller muss der Genehmigungsbehörde die entsprechenden Daten zur Leistung der Achsen einer Familie zur Verfügung stellen.
2. Sonderfälle
In manchen Fällen können Wechselwirkungen zwischen den Parametern vorliegen. Dies muss berücksichtigt werden, damit gewährleistet ist, dass einer Achsenfamilie nur Achsen mit ähnlichen Eigenschaften zugeordnet werden. Diese Fälle sind vom Hersteller zu ermitteln und der Genehmigungsbehörde mitzuteilen. Sie sind dann bei der Festlegung einer neuen Achsenfamilie zu berücksichtigen.
Sind Parameter vorhanden, die in Absatz 3 nicht aufgeführt sind, aber das Leistungsniveau stark beeinflussen, so muss sie der Hersteller nach den anerkannten Regeln der Technik feststellen und der Genehmigungsbehörde mitteilen.
3. Parameter für die Festlegung der Achsenfamilie
- Einfach untersetzte Achse (SR)
- Nabenuntersetzungsachse (HR)
- Portalachse (SP)
- Einfach untersetzte Durchtriebsachse (SRT) /
- Nabenuntersetzungsachse mit Durchtrieb (HRT)
- Gleiche Geometrie des inneren Achsgehäuses zwischen Differenziallagern und der horizontalen Ebene des Zentrums der Ritzelwelle nach Angabe auf Zeichnung (Ausnahme Portalachsen (SP)). Änderungen der Geometrie aufgrund des wahlweisen Einbaus einer Differenzialsperre sind innerhalb derselben Achsenfamilie erlaubt. Bei spiegelbildlichen Achsgehäusen können die spiegelbildlichen Achsen in dieselbe Familie eingeordnet werden wie die Originalachsen, vorausgesetzt, die Kegelradgetriebe sind für die andere Laufrichtung geeignet (Änderung der Spiralrichtung).
- Kronenrad-Durchmesser (+ 1,5/- 8 % rel. zum größten Durchmesser nach Zeichnung)
- Vertikaler Achsversatz Ritzel/Kronenrad innerhalb ± 2 mm
- Bei Portalachsen (SP): Getrieberad-Winkel zur horizontalen Ebene innerhalb ± 5°
- Bei Portalachsen (SP): Winkel zwischen Ritzel-Achse und Kronenrad-Achse innerhalb ± 3,5°
- Bei Nabenuntersetzungs- und Portalachsen (HR, HRT FHR, SP): Gleiche Anzahl von Planeten- und Stirnrädern
- Übersetzungsverhältnis jeder Gangstufe in einer Achse im Bereich 2, solange nur ein Getriebe gewechselt wird
- Ölstand innerhalb ± 10 mm oder Ölvolumen innerhalb ± 0,5 l zur Angabe auf der Zeichnung und Einbauort im Fahrzeug
- Gleicher Viskositätsgrad der Ölart (empfohlenes ab Werk eingefülltes Öl)
- Art der Lager (Innendurchmesser, Außendurchmesser und Breite) an den entsprechenden Stellen (falls vorhanden) mit einer Toleranz von ±1 mm gegenüber der Zeichnungsreferenz
- Art der Dichtung
4. Wahl der Stammachse
4.1. Die Stammachse einer Achsenfamilie wird als die Achse mit der größten Achsübersetzung definiert. Wenn mehr als zwei Achsen dieselbe Achsübersetzung aufweisen, muss der Hersteller eine Analyse vorlegen, damit die Achse mit den schlechtesten Werten als Stammachse definiert werden kann.
4.2. Die Genehmigungsbehörde kann zu dem Schluss kommen, dass der stärkste Drehmomentverlust innerhalb der Familie am besten durch Überprüfung weiterer Achsen ermittelt werden kann. In diesem Fall muss der Achsenhersteller Angaben machen, mit denen die Achse mit den voraussichtlich höchsten Drehmomentverlusten innerhalb der Familie ermittelt werden kann.
4.3. Weisen die Motoren einer Achsenfamilie weitere Merkmale auf, von denen man einen Einfluss auf die Drehmomentverluste erwarten kann, so sind diese Merkmale ebenfalls zu bestimmen und bei der Auswahl der Stammachse zu berücksichtigen.
| Kennzeichnungen und Nummerierung | Anlage 5 19 |
Wenn eine Achse gemäß diesem Anhang typgenehmigt wird, muss die Achse folgende Angaben aufweisen:
1.1. Herstellername und Handelsmarke
1.2. Fabrikmarke und Typenbezeichnung gemäß Angaben in Anlage 2 Absätze 0.2 und 0.3 dieses Anhangs
1.3. Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben "e" umgibt, gefolgt von der Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
1 für Deutschland2 für Frankreich
3 für Italien
4 für die Niederlande
5 für Schweden
6 für Belgien
7 für Ungarn
8 für die Tschechische Republik
9 für Spanien
11 für das Vereinigte Königreich
12 für Österreich
13 für Luxemburg
17 für Finnland
18 für Dänemark
19 für Rumänien
20 für Polen
21 für Portugal
23 für Griechenland
24 für Irland
25 für Kroatien
26 für Slowenien
27 für die Slowakei
29 für Estland
32 für Lettland
34 für Bulgarien
36 für Litauen
49 für Zypern
50 für Malta
1.4. Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die "Grundzertifizierungsnummer" gemäß den Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang IV der Verordnung (EU) 2020/683 vermerkt sein. Davor stehen die zweistellige laufende Nummer, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet, sowie der Buchstabe "L" zur Angabe, dass die Zertifizierung für eine Achse erteilt wurde.
Die laufende Nummer für die vorliegende Verordnung ist "02."
1.4.1. Beispiel für ein Zertifizierungszeichen samt Abmessungen
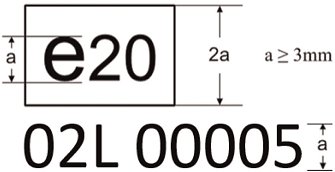
Das obige an einer Achse angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (02) geben die laufende Nummer an, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet. Der folgende Buchstabe gibt an, dass die Zertifizierung für eine Achse (L) erteilt wurde. Die letzten fünf Ziffern (00005) wurden von der Typgenehmigungsbehörde vergeben und stellen die Grundzertifizierungsnummer für die Achse dar.
1.5. Auf Ersuchen des Antragstellers für die Zertifizierung und nach vorheriger Abstimmung mit der Typgenehmigungsbehörde können andere Typengrößen als die in 1.4.1 angegebenen verwendet werden. Diese alternativen Typengrößen müssen weiterhin deutlich lesbar sein.
1.6. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer der Achse ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden.
1.7. Die Zertifizierungsnummer muss bei eingebauter Achse in das Fahrzeug sichtbar sein und an einem für den normalen Betrieb notwendigen Teil angebracht werden, das während seiner Lebensdauer in der Regel nicht ausgetauscht werden muss.
2.1. Die Zertifizierungsnummer für Achsen setzt sich wie folgt zusammen:
eX*YYYY/YYYY*ZZZZ/ZZZZ*L*00000*00
| Abschnitt 1 | Abschnitt 2 | Abschnitt 3 | Zusätzlicher Buchstabe zu Abschnitt 3 | Abschnitt 4 | Abschnitt 5 |
| Angabe des Landes, das die Zertifizierung ausstellt | Verordnung über CO2-Zertifizierungen für schwere Nutzfahrzeuge "2017/2400" | Letzte Änderung der Verordnung (ZZZZ/ZZZZ) | L = Achse | Grundzertifizierungsnummer 00000 | Erweiterung 00 |
| Eingabeparameter für das Simulationsinstrument | Anlage 6 19 |
Diese Anlage enthält die Liste der vom Bauteilehersteller für die Eingabe in das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
(1) "Parameter ID": im Simulationsinstrument verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten
(2) "Type": Datentyp des Parameters
| string ... | Zeichenabfolge in ISO8859-1-Kodierung |
| token ... | Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende |
| date ... | Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DD T HH:MM:SS Z, wobei kursive Zeichen unveränderlich sind, z.B. "2002-05-30T09:30:10Z" |
| integer ... | Wert mit integralem Datentyp ohne führende Nullen, z.B."1800" |
| double, X ... | Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen (".") und ohne führende Nullen, z.B. für "double, 2": "2345.67", für "double, 4": "45.6780" |
(3) "Unit" ... physikalische Einheit des Parameters
Satz Eingabeparameter
Tabelle 1 Eingabeparameter "Axlegear/General" 19
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Manufacturer | P215 | token | [-] | |
| Model | P216 | token | [-] | |
| CertificationNumber | P217 | token | [-] | |
| Date | P218 | date Time | [-] | Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
| AppVersion | P219 | token | [-] | |
| LineType | P253 | string | [-] | Zulässige Werte: "Single reduction axle", "Single portal axle", "Hub reduction axle", "Single reduction tandem axle", "Hub reduction tandem axle" |
| Ratio | P150 | double, 3 | [-] | |
| CertificationMethod | P256 | string | [-] | Zulässige Werte: "Measured", "Standard values" |
Tabelle 2 Eingabeparameter "Axlegear/LossMap" für jeden Rasterpunkt im Drehmomentverlust-Kennfeld
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Input Speed | P151 | double, 2 | [1/min] | |
| Input Torque | P152 | double, 2 | [Nm] | |
| Torque Loss | P153 | double, 2 | [Nm] |
| Überprüfung der Daten zum Luftwiderstand | Anhang VIII 19 22 |
In diesem Anhang sind die Prüfverfahren für die der Bestimmung der der Daten zum Luftwiderstand beschrieben.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs gelten folgende Begriffsbestimmungen:
1. "Aktive aerodynamische Einrichtung" bezeichnet Maßnahmen, die von einer Steuereinheit zur Verringerung des Luftwiderstands des gesamten Fahrzeugs aktiviert werden.2."Aerodynamisches Zubehör" bezeichnet zulässige Einrichtungen, die dazu dienen, den Luftstrom um das gesamte Fahrzeug herum zu beeinflussen.
3. "A-Säule" bezeichnet eine tragende Struktur, die das Fahrerhausdach und die Stirnwand miteinander verbindet.
4. "Geometrie der Rohkarosserie" bezeichnet die tragende Struktur einschließlich der Windschutzscheibe des Fahrerhauses.
5. "B-Säule" bezeichnet eine tragende Struktur, die in der Mitte des Fahrerhauses dessen Boden und Dach verbindet.
6. "Fahrerhaus-Unterbau" bezeichnet die tragende Struktur des Fahrerhausbodens.
7. "Fahrerhaushöhe über dem Rahmen" bezeichnet den Abstand des Fahrerhaus-Bezugspunkts zum Rahmen in der Senkrechten z. Der Abstand wird von der Oberkante des horizontalen Rahmens bis zum Fahrerhaus-Bezugspunkt in der Senkrechten z gemessen.
8. "Fahrerhaus-Bezugspunkt" bezeichnet den Bezugspunkt (x/y/z = 0/0/0) im CAD-Koordinatensystem des Fahrerhauses oder einen klar definierten Punkt des Fahrerhauspakets, z.B. den Fersenpunkt.
9. "Fahrerhausbreite" bezeichnet den horizontalen Abstand zwischen der linken und rechten B-Säule des Fahrerhauses.
10. "Prüfung mit konstanter Geschwindigkeit" bezeichnet das auf einer Prüfstrecke durchzuführende Messverfahren zur Ermittlung des Luftwiderstands.
11. "Datensatz" bezeichnet die bei einem einfachen Durchfahren eines Messabschnitts aufgezeichneten Daten.
12. "EMS" bezeichnet das europäische modulare System (EMS) gemäß der Richtlinie 96/53/EG des Rates.
13. "Rahmenhöhe" bezeichnet den Abstand des Radmittelpunktes zur Oberkante des Rahmens in der z-Achse.
14. "Fersenpunkt" bezeichnet den Punkt, an dem die Ferse des Schuhs den niedergedrückten Bodenbelag berührt, wenn die Schuhunterseite mit dem nicht niedergetretenen Gaspedal in Kontakt ist und das Fußgelenk einen Winkel von 87° bildet. (ISO 20176:2011)
15. "Messfläche" bezeichnet ausgewiesene Teile der Prüfstrecke, bestehend aus mindestens einem Messabschnitt und einem davorliegenden Stabilisierungsabschnitt.
16. "Messabschnitt" bezeichnet einen für die Datenaufzeichnung und -auswertung relevanten ausgewiesenen Teil der Prüfstrecke.
17. "Dachhöhe" bezeichnet den Abstand des Fahrerhaus-Bezugspunktes vom höchsten Punkt des Daches ohne Schiebedach in der Senkrechten z.
3. Bestimmung des Luftwiderstands 19 22
Zur Bestimmung der Luftwiderstandseigenschaften ist das Verfahren zur Prüfung mit konstanter Geschwindigkeit anzuwenden. Während der Prüfung mit konstanter Geschwindigkeit sind die wichtigsten Signale wie Antriebsdrehmoment, Fahrzeuggeschwindigkeit, Luftströmungsgeschwindigkeit und Gierwinkel bei zwei unterschiedlichen konstanten Fahrzeuggeschwindigkeiten (niedrige und hohe Geschwindigkeit) unter festgelegten Bedingungen auf einer Prüfstrecke zu messen. Die während dieser Prüfung mit konstanter Geschwindigkeit aufgezeichneten Messdaten sind in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten einzugeben. Dieses Instrument bestimmt das Produkt aus dem Luftwiderstandskoeffizienten und der Querschnittsfläche bei fehlendem Seitenwind Cd Acr (0), das in das Simulationsinstrument einfließt. Von dem die Zertifizierung beantragenden Antragsteller muss ein Wert für Cd · Adeclaredangegeben werden, der in folgendem Bereich liegt: von gleich Cd · Acr (0)bis maximal +0,2 m2 höher als dieser Wert. Der Wert Cd·A declared dient als Eingabe für das Simulationsinstrument und als Bezugswert für die Überprüfung der Übereinstimmung der zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften.
Für Fahrzeuge, die nicht zu einer Familie gehören, müssen gemäß der Beschreibung in Anlage 7 dieses Anhangs die Standardwerte für Cd· Adeclaredverwendet werden. In diesem Fall müssen keine Eingabedaten zum Luftwiderstand vorgelegt werden. Die Standardwerte werden vom Simulationsinstrument automatisch zugewiesen.
3.1. Anforderungen an die Prüfstrecke
3.1.1. Die Prüfstrecke muss folgende Geometrie haben:
- Kreisförmige Strecke (befahrbar in einer Richtung *):
mit zwei Messflächen jeweils auf einem geraden Absatz, die eine maximale Abweichung von weniger als 20 Grad haben;
oder
- Kreisförmige oder gerade Prüfstrecke (befahrbar in beiden Richtungen):
mit nur einer Messfläche (oder zwei Messflächen mit der oben angegebenen maximalen Abweichung); zwei Optionen sind möglich: unterschiedliche Fahrtrichtung entweder nach jedem Prüfabschnitt oder nach einem festzulegenden Satz von Prüfabschnitten, z.B. zehn Mal Fahrtrichtung 1 gefolgt von zehn Mal Fahrtrichtung 2.
3.1.2. Messabschnitte
Auf der Prüfstrecke sind ein oder mehrere Messabschnitte mit einer Länge von 250 m mit einer Toleranz von ± 3 m zu definieren.
3.1.3. Messflächen
Eine Messfläche muss aus mindestens einem Messabschnitt und einem Stabilisierungsabschnitt bestehen. Dem ersten Messabschnitt einer Messfläche muss ein Stabilisierungsabschnitt vorangehen, um Geschwindigkeit und Drehmoment zu stabilisieren. Der Stabilisierungsabschnitt muss mindestens 25 m lang sein. Die Prüfstrecke ist so zu gestalten, dass das Fahrzeug bereits mit der während der Prüfung vorgesehenen Höchstgeschwindigkeit in den Stabilisierungsabschnitt eintreten kann.
Breite und Länge des Anfangs- und Endpunkts eines jeden Messabschnitts sind mit einer Genauigkeit von mindestens 0,15 m, d. h. 95 % Kreisfehlerwahrscheinlichkeit (DGPS-Genauigkeit), festzulegen.
3.1.4. Form der Messabschnitte
Mess- und Stabilisierungsabschnitt müssen eine Gerade sein.
3.1.5. Längsneigung der Messabschnitte
Die durchschnittliche Längsneigung eines jeden Messabschnitts und des Stabilisierungsabschnitts darf nicht mehr als ± 1 % betragen. Eine Abweichung der Neigung im Messabschnitt darf nicht zu Geschwindigkeits- und Drehmomentänderungen führen, welche die in 3.10.1.1 Ziffern vii. und viii. dieses Anhangs angegebenen Schwellenwerte überschreiten.
3.1.6. Oberfläche der Prüfstrecke
Die Prüfstrecke muss aus Asphalt oder Beton bestehen. Ein Messabschnitt muss eine einheitliche Oberfläche haben. Verschiedene Messabschnitte dürfen unterschiedliche Oberflächen aufweisen.
3.1.7. Stillstandbereich
Die Prüfstrecke muss einen Stillstandbereich umfassen, in dem das Fahrzeug angehalten werden kann, um die Nullstellung und die Driftüberprüfung des Drehmomentmesssystems durchzuführen.
3.1.8. Abstand zu straßenseitigen Hindernissen und lichte Höhe
Auf beiden Seiten des Fahrzeugs dürfen sich innerhalb eines Abstands von 5 m keine Hindernisse befinden. Sicherheitsbarrieren bis zu einer Höhe von 1 m mit mehr als 2,5 m Abstand zum Fahrzeug sind zulässig. Über dem Messabschnitt dürfen sich keine Brücken oder ähnlichen Bauwerke befinden. Die Prüfstrecke muss über eine ausreichende lichte Höhe verfügen, damit das Anemometer wie in Absatz 3.4.7 dieses Anhangs beschrieben am Fahrzeug angebracht werden kann.
3.1.9. Höhenprofil
Vom Hersteller ist festzulegen, ob bei der Auswertung der Prüfung eine Höhenkorrektur vorgenommen werden muss. Ist dies der Fall, muss das Höhenprofil für jeden Messabschnitt zur Verfügung gestellt werden. Die Daten müssen folgende Anforderungen erfüllen:
- Die Messungen für das Höhenprofil sind in einem Rasterabstand von kleiner oder gleich 50 m in Fahrtrichtung durchzuführen.
- Für jeden Rasterpunkt sind Länge, Breite und Höhe an mindestens einem Punkt ("Höhenmesspunkt") beidseitig der Fahrbahnmittellinie zu messen. Anschließend ist ein Mittelwert für den Rasterpunkt zu bilden.
- Die Rasterpunkte, die in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten eingehen, müssen in einem Abstand von weniger als 1 m zur Mittellinie des Messabschnitts liegen.
- Die Lage der Höhenmesspunkte zur Fahrbahnmittellinie (senkrechter Abstand, Anzahl der Punkte) ist so zu wählen, dass das resultierende Höhenprofil für die vom Prüffahrzeug gefahrene Neigung repräsentativ ist.
- Das Höhenprofil muss eine Genauigkeit von ± 1 cm oder besser aufweisen.
- Die Messdaten dürfen nicht älter als zehn Jahre sein. Eine Erneuerung der Oberfläche innerhalb der Messfläche erfordert eine neue Messung des Höhenprofils.
3.2. Anforderungen an die Umgebungsbedingungen
3.2.1. Die Umgebungsbedingungen sind mit den in Absatz 3.4 angegebenen Messeinrichtungen zu messen.
3.2.2. Die Umgebungstemperatur muss im Bereich von 0 °C bis 25 °C liegen. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des Signals für die am Fahrzeug gemessene Umgebungstemperatur geprüft. Dieses Kriterium gilt nur für Datensätze, die während der Prüfsequenz "niedrige Geschwindigkeit - hohe Geschwindigkeit - niedrige Geschwindigkeit" aufgezeichnet werden; es gilt nicht für die Versatzkalibrierungsprüfung und die Warmlaufphasen.
3.2.3. Die Bodentemperatur darf 40 °C nicht überschreiten. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des Signals für die von einem Infrarotsensor am Fahrzeug gemessene Bodentemperatur geprüft. Dieses Kriterium gilt nur für Datensätze, die während der Prüfsequenz "niedrige Geschwindigkeit - hohe Geschwindigkeit - niedrige Geschwindigkeit" aufgezeichnet werden; es gilt nicht für die Versatzkalibrierungsprüfung und die Warmlaufphasen.
3.2.4. Während der Prüfsequenz "niedrige Geschwindigkeit - hohe Geschwindigkeit - niedrige Geschwindigkeit" muss die Straßenoberfläche trocken sein, damit vergleichbare Rollwiderstandskoeffizienten erhalten werden.
3.2.5. Die Windbedingungen müssen innerhalb des folgenden Bereichs liegen:
- Durchschnittliche Windgeschwindigkeit: ≤ 5 m/s
- Böengeschwindigkeit (1 s zentraler gleitender Durchschnitt):
≤ 8 m/s
Die Ziffern i und ii gelten nur für Datensätze, die während der Prüfung mit hoher Geschwindigkeit und während der Versatzkalibrierungsprüfung aufgezeichnet werden; sie gelten nicht für die Prüfungen mit niedriger Geschwindigkeit.
- Durchschnittlicher Gierwinkel (β):
≤ 3 Grad für Datensätze, die während der Prüfung mit hoher Geschwindigkeit aufgezeichnet werden;
≤ 5 Grad für Datensätze, die während der Versatzkalibrierungsprüfung aufgezeichnet werden.
Die Gültigkeit der Windbedingungen wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage der Signale geprüft, die am Fahrzeug nach Durchführung der Grenzschichtkorrektur aufgezeichnet werden. Messdaten, die unter Bedingungen erfasst werden, welche die oben stehenden Grenzwerte überschreiten, werden automatisch aus der Berechnung ausgeschlossen.
3.3. Aufbau des Fahrzeugs 19 22
3.3.1. Allgemeine Anforderungen an den Aufbau
3.3.1.1. Das geprüfte Fahrzeug muss im Einklang mit den Vorschriften für die Typgenehmigung gemäß Verordnung (EU) 2018/858 repräsentativ für das Fahrzeug sein, das in Verkehr gebracht werden soll. Ausrüstung, die zur Durchführung der Prüfung mit konstanter Geschwindigkeit erforderlich ist (z.B. Gesamtfahrzeughöhe einschließlich Anemometer), ist von dieser Bestimmung ausgenommen.
3.3.1.2. Das Fahrzeug ist mit Reifen auszustatten, die den folgenden Kriterien entsprechen:
- Beste oder zweitbeste Reifenklasse in Bezug auf die Kraftstoffeffizienz die zum Zeitpunkt der Prüfung verfügbar ist;
- Maximale Profiltiefe von 10 mm bei allen Reifen des vollständigen Fahrzeugs, einschließlich Anhänger (sofern zutreffend);
- Die Reifen müssen den seitlich am Reifen angegebenen Druck gemäß Artikel 3 der UN-Regelung Nr. 54 1 aufweisen; dabei gilt eine Toleranz ±20 kPa.
3.3.1.3. Die Achseinstellung muss innerhalb der Herstellerangaben liegen.
3.3.1.4. Während der Prüfungen mit niedriger Geschwindigkeit - hoher Geschwindigkeit - niedriger Geschwindigkeit dürfen keine aktiven Reifendruckkontrollsysteme verwendet werden.
3.3.1.5. Ist das Fahrzeug mit einer aktiven aerodynamischen Einrichtung ausgestattet, so kann diese während der Prüfung mit konstanter Geschwindigkeit unter den folgenden Bedingungen aktiv sein:
- Der Genehmigungsbehörde gegenüber wurde nachgewiesen, dass die Einrichtung stets aktiviert und wirksam ist, um den Luftwiderstand bei einer Fahrzeuggeschwindigkeit über 60 km/h für mittelschwere und schwere Lastkraftwagen und über 80 km/h für schwere Busse zu verringern.
- Die Einrichtung ist bei allen Fahrzeugen der Familie auf die gleiche Weise installiert und wirksam.
In allen anderen Fällen muss die aktive aerodynamische Einrichtung während der Prüfung mit konstanter Geschwindigkeit vollständig deaktiviert werden.
3.3.1.6. Das Fahrzeug darf nicht mit provisorischen Funktionen, Modifikationen oder Einrichtungen ausgestattet sein, die für das verwendete Fahrzeug nicht repräsentativ sind und die dazu dienen, den Luftwiderstandswert während der Prüfung zu verringern (z.B. verschlossene Öffnungen im Aufbau). Modifikationen, die vorgenommen wurden, um die aerodynamischen Eigenschaften des geprüften Fahrzeugs mit den Spezifikationen des Stammfahrzeugs in Einklang zu bringen, sind zulässig.
3.3.1.7. Nachrüstteile, d. h. Teile, die nicht unter die Fahrzeug-Typgenehmigung gemäß Verordnung (EU) 2018/858 fallen (z.B. Sonnenblenden, Hupen, Zusatzscheinwerfer, Signalleuchten, Frontschutzbügel oder Skiboxen), werden für den Luftwiderstand gemäß diesem Anhang nicht berücksichtigt.
3.3.1.8. Die Messung ist ohne Nutzlast durchzuführen.
3.3.2. Anforderungen an den Aufbau für mittelschwere und schwere Sololastkraftwagen
3.3.2.1. Das Fahrgestell muss den Abmessungen der Standardkarosserie oder des Standard-Sattelanhängers entsprechen, wie in Anlage 4 dieses Anhangs definiert.
3.3.2.2. Die gemäß Nummer 3.5.3.1 Ziffer vii bestimmte Fahrzeughöhe muss innerhalb der in Anlage 3 dieses Anhangs angegebenen Grenzwerte liegen.
3.3.2.3. Der Mindestabstand zwischen Fahrerhaus und Kasten oder Sattelanhänger muss den Herstellervorgaben und den Anweisungen des Karosseriebauers entsprechen.
3.3.2.4. Fahrerhaus und aerodynamisches Zubehör sind so anzupassen, dass sie für die definierte Standardkarosserie oder den definierten Standard-Sattelanhänger optimal geeignet sind. Der Aufbau von aerodynamischem Zubehör (z.B. Spoilern) muss den Herstelleranweisungen entsprechen.
3.3.2.5. Der Sattelanhänger ist gemäß den Vorgaben in Anlage 4 dieses Anhangs einzurichten.
Das Kalibrierlabor muss die Anforderungen der IATF 16949, ISO 9000 Reihen oder der ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale und internationale Prüfnormen zurückführbar sein.
3.4.1. Drehmoment
3.4.1.1. Zur Messung des direkten Drehmoments an allen Antriebsachsen ist eines der folgenden Messsysteme zu verwenden:
- Naben-Drehmomentmesser
- Felgen-Drehmomentmesser
- Halbwellen-Drehmomentmesser
3.4.1.2. Jedes Drehmomentmessgerät muss durch Kalibrierung die folgenden Systemanforderungen erfüllen:
i) Nichtlinearität :
< ± 6 Nm für schwere Lastkraftwagen und schwere Busse
< ± 5 Nm für mittelschwere Lastkraftwagen;ii) Wiederholbarkeit : < ± 6 Nm für schwere Lastkraftwagen und schwere Busse
< ± 5 Nm für mittelschwere Lastkraftwagen;iii) Nebensprechen : < ± 10 Nm für schwere Lastkraftwagen und schwere Busse < ± 8 Nm für mittelschwere Lastkraftwagen
(gilt nur für Felgen-Drehmomentmesser);
iv) Messrate : ≥ 20 Hz
dabei gilt:
"Nichtlinearität" bedeutet die maximale Abweichung zwischen den idealen und den tatsächlichen Eigenschaften des Ausgangssignals bezogen auf die Messgröße in einem bestimmten Messbereich.
"Wiederholbarkeit" gibt den Grad der Übereinstimmung zwischen den Ergebnissen aufeinanderfolgender Messungen derselben Messgröße an, die unter denselben Messbedingungen durchgeführt werden.
"Nebensprechen" ist ein Signal am Hauptausgang eines Sensors (My), das von einer auf den Sensor wirkenden Messgröße (Fz) erzeugt wird und das sich von der diesem Ausgang zugeordneten Messgröße unterscheidet. Das Bezugssystem wird gemäß ISO 4130 definiert.
Die aufgezeichneten Drehmomentdaten sind für den vom Lieferanten" bestimmten Messgerätefehler zu korrigieren.
3.4.2. Fahrzeuggeschwindigkeit
Die Fahrzeuggeschwindigkeit wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des CAN-Bus-Vorderachsensignals bestimmt, dessen Kalibrierung auf einer der folgenden Größen basiert:
| Option a): | einer Bezugsgeschwindigkeit, die sich errechnet aus einer Delta-Zeit von zwei festen optoelektronischen Schranken (siehe Absatz 3.4.4 dieses Anhangs) und der bekannten Länge des oder der Messabschnitte oder |
| Option b): | einem durch die Delta-Zeit bestimmten Geschwindigkeitssignal vom Positionssignal eines DGPS und der bekannten Länge des oder der Messabschnitte, von den DGPS-Koordinaten abgeleitet. |
Zur Kalibrierung der Fahrzeuggeschwindigkeit werden die während der Prüfung mit hoher Geschwindigkeit aufgezeichneten Daten verwendet.
3.4.3. Referenzsignal zur Berechnung der Drehgeschwindigkeit der Räder an der Antriebsachse 22
Es stehen drei Optionen zur Auswahl:
Option 1: Auf Grundlage der Motordrehzahl
Es ist das CAN-Motordrehzahlsignal zusammen mit den Übersetzungsverhältnissen (Gänge für die Prüfung mit niedriger Geschwindigkeit und für die Prüfung mit hoher Geschwindigkeit, Achsübersetzung) zur Verfügung zu stellen. Für das CAN-Motordrehzahlsignal ist nachzuweisen, dass das für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten gelieferte Signal mit dem Signal identisch ist, das für die Prüfung in Betrieb befindlicher Fahrzeuge oder Motoren gemäß Anhang I der Verordnung (EU) Nr. 582/2011 der Kommission zu verwenden ist.
Bei Fahrzeugen mit einem Drehmomentwandler, die nicht in der Lage sind, die in Option 1 genannte Prüfung mit niedriger Geschwindigkeit mit geschlossener Wandlerüberbrückungskupplung zu durchlaufen, müssen zusätzlich das Drehzahlsignal der Kardanwelle und die Achsübersetzung oder das Signal der durchschnittlichen Raddrehzahl für die Antriebsachse für die Eingabe in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung gestellt werden. Es muss nachgewiesen werden, dass die anhand dieses zusätzlichen Signals berechnete Motordrehzahl im Vergleich zur CAN-Motordrehzahl innerhalb eines Bereichs von 1 % liegt. Dieser Nachweis erfolgt für den durchschnittlichen Wert über einen Messabschnitt, der mit der niedrigstmöglichen Fahrzeuggeschwindigkeit bei geschlossener Wandlerüberbrückungskupplung und bei der Prüfung mit hoher Geschwindigkeit mit der anwendbaren Fahrzeuggeschwindigkeit durchfahren wird.
Option 2: Auf Grundlage der Raddrehzahl
Es ist der Mittelwert der CAN-Signale für die Drehzahl des linken und rechten Rades an der Antriebsachse zur Verfügung zu stellen. Alternativ können externe Sensoren verwendet werden. Jede Methode muss den Anforderungen in Anhang Xa Tabelle 2 entsprechen.
Nach Option 2 sind die Eingangsparameter für die Gang- und die Achsübersetzung unabhängig von der Antriebsstrangkonfiguration auf "1" zu setzen.
Option 3: Auf Grundlage der Elektromotordrehzahl
Bei Hybridelektrofahrzeugen und reinen Elektrofahrzeugen ist das CAN-Elektromotordrehzahlsignal zusammen mit den Übersetzungsverhältnissen (Gänge für die Prüfung mit niedriger Geschwindigkeit und für die Prüfung mit hoher Geschwindigkeit und gegebenenfalls Achsübersetzung) zur Verfügung zu stellen. Es ist nachzuweisen, dass die Radgeschwindigkeit der Antriebsachse bei der Prüfung mit niedriger und hoher Geschwindigkeit ausschließlich durch diese Spezifikationen für die Konfiguration des Antriebsstrangs festgelegt wird.
3.4.4. Optoelektronische Schranken
Das Signal der Schranken ist für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung zu stellen, damit Anfang und Ende des Messabschnitts und die Kalibrierung des Fahrzeuggeschwindigkeitssignals ausgelöst werden. Die Messrate des Auslösesignals muss größer oder gleich 100 Hz sein. Alternativ kann ein DGPS-System verwendet werden.
3.4.5. (D)GPS-System
Option a) nur für die Positionsmessung: GPS
Erforderliche Genauigkeit:
| i. | Position: | < 3 m 95 % Kreisfehlerwahrscheinlichkeit |
| ii. | Aktualisierungsrate: | ≥ 4Hz |
Option b) für die Kalibrierung der Fahrzeuggeschwindigkeit und die Positionsmessung: Differential GPS-System (DGPS)
Erforderliche Genauigkeit:
| i. | Position: | 0,15 m 95 % Kreisfehlerwahrscheinlichkeit |
| ii. | Aktualisierungsrate: | ≥ 100 Hz |
3.4.6. Stationäre Wetterstation
Umgebungsdruck und Feuchtigkeit der Umgebungsluft werden mithilfe einer stationären Wetterstation ermittelt. Diese meteorologische Vorrichtung ist in einem Abstand von weniger als 2.000 m zu einer der Messflächen sowie in einer Höhe aufzustellen, die mindestens derjenigen der Messflächen entspricht.
Erforderliche Genauigkeit:
| i. | Temperatur: | ± 1 °C |
| ii. | Feuchtigkeit: | ± 5 % RH |
| iii. | Druck: | ± 1 mbar |
| iv. | Aktualisierungsrate: | ≤ 6 Minuten |
3.4.7. Mobiles Anemometer
Die Luftströmungsbedingungen, d. h. die Luftströmungsgeschwindigkeit und der Gierwinkel (β) zwischen dem Gesamtluftstrom und der Längsachse des Fahrzeugs, sind mit einem mobilen Anemometer zu messen.
3.4.7.1. Erforderliche Genauigkeit
Das Anemometer ist in Einrichtungen gemäß ISO 16622 zu kalibrieren. Die Anforderungen an die Genauigkeit gemäß Tabelle 1 müssen erfüllt sein:
Tabelle 1 Erforderliche Genauigkeit des Anemometers
| Luftgeschwindigkeitsbereich
[m/s] | Genauigkeit der Luftgeschwindigkeit
[m/s] | Gierwinkelgenauigkeit im Gierwinkelbereich von 180 Grad ± 7 Grad
[Grad] |
| 20 ± 1 | ± 0,7 | ± 1,0 |
| 27 ± 1 | ± 0,9 | ± 1,0 |
| 35 ± 1 | ± 1,2 | ± 1,0 |
3.4.7.2. Installationsposition 22
Das mobile Anemometer ist am Fahrzeug an der vorgeschriebenen Position zu installieren:
- X-Position:
Mittelschwere und schwere Lastkraftwagen und Sattelzugmaschinen: Frontseite ± 0,3 m vom Sattelanhänger oder dem Kastenaufbau entfernt;
Schwere Busse: zwischen dem Ende des vorderen Viertel des Fahrzeugs und dem Fahrzeugheck.
Mittelschwere Lastkraftwagen vom Typ "Van": zwischen der B-Säule bis zum Fahrzeugheck.
- Y-Position: Symmetrieebene mit einer Toleranz von ± 0,1 m;
- z-Position:
Die Installationshöhe über dem Fahrzeug muss ein Drittel der vom Boden gemessenen gesamten Fahrzeughöhe betragen, mit einer Toleranz von 0,0 m bis + 0,2 m. Bei Fahrzeugen mit einer Gesamthöhe von mehr als 4 m kann auf Antrag des Herstellers die Installationshöhe über dem Fahrzeug auf 1,3 m begrenzt werden, mit einer Toleranz von 0,0 m bis + 0,2 m.
Die Instrumentierung muss so genau wie möglich unter Verwendung geometrischer oder optischer Hilfen erfolgen. Bei jedem verbleibenden Versatz muss eine entsprechende Kalibrierung gemäß Absatz 3.6 dieses Anhangs durchgeführt werden.
3.4.7.3. Die Aktualisierungsrate des Anemometers muss 4 Hz oder mehr betragen.
3.4.8. Temperaturaufnehmer für die Umgebungstemperatur am Fahrzeug
Die Temperatur der Umgebungsluft ist am Pol des mobilen Anemometers zu messen. Die Installationshöhe darf höchstens 600 mm unter dem mobilen Anemometer liegen. Der Sensor ist vor Sonnenlicht abzuschirmen.
Erforderliche Genauigkeit: ± 1 °C
Aktualisierungsrate: ≥ 1 Hz
3.4.9. Temperatur des Prüfgeländes 22
Der Infrarotsensor muss gemäß ASTM E2847 oder VDI/VDE 3511 kalibriert werden. Für ein Asphalt- oder Betonfeld ist ein Emissivitätsfaktor von 0,90 anzuwenden. Der Infrarotsensor muss gemäß ASTM E 2847 kalibriert werden.
Erforderliche Kalibriergenauigkeit: Temperatur: ± 2,5 °C
Aktualisierungsrate: ≥ 1 Hz
3.5. Verfahren zur Prüfung mit konstanter Geschwindigkeit 19
Für jede anwendbare Kombination von Messabschnitt und Fahrtrichtung ist das Verfahren zur Prüfung mit konstanter Geschwindigkeit, das sich aus einer ersten Prüfung mit niedriger Geschwindigkeit, einer anschließenden Prüfung mit hoher Geschwindigkeit und einer zweiten Prüfung mit niedriger Geschwindigkeit (wie im Folgenden beschrieben) zusammensetzt, in derselben Richtung durchzuführen.
3.5.1. Bei der Prüfung mit niedriger Geschwindigkeit muss die durchschnittliche Geschwindigkeit in einem Messabschnitt zwischen 10 und 15 km/h liegen.
3.5.2. Bei der Prüfung mit hoher Geschwindigkeit muss die durchschnittliche Geschwindigkeit in einem Messabschnitt innerhalb des folgenden Bereichs liegen:
Höchstgeschwindigkeit: 95 km/h für mittlere und schwere Lastkraftwagen und 103 km/h für schwere Busse;
Mindestgeschwindigkeit: 85 km/h oder 3 km/h unter der Höchstgeschwindigkeit, mit der das Fahrzeug die Prüfstrecke befahren kann, je nachdem, welcher Wert niedriger ist.
3.5.3. Die Prüfung ist strikt nach der in den Absätzen 3.5.3.1 bis 3.5.3.9 dieses Anhangs angegebenen Reihenfolge durchzuführen.
3.5.3.1. Vorbereitung des Fahrzeugs und der Messsysteme 19 22
- Anbringung der Drehzahlmesser an den Antriebsachsen des Prüffahrzeugs und Überprüfung der Installation und der Signaldaten gemäß den Herstellerangaben.
- Dokumentation der relevanten allgemeinen Fahrzeugdaten für die offizielle Prüfvorlage gemäß Absatz 3.7 dieses Anhangs.
- Zur Berechnung der Beschleunigungskorrektur durch das Instrument zur Vorverarbeitung der Luftwiderstandsdaten ist vor der Prüfung das tatsächliche Fahrzeuggewicht in einem Bereich von ± 500 kg zu ermitteln.
- Überprüfung der Reifen zur Feststellung des maximal zulässigen Reifendrucks und Dokumentation der Reifendruckwerte.
- Vorbereitung der optoelektronischen Schranken an dem oder den Messabschnitten oder Überprüfung der korrekten Funktion des DGPS-Systems.
- Anbringung des mobilen Anemometers am Fahrzeug und/oder Kontrolle der Installation, der Position und der Ausrichtung. Jedes Mal, wenn das Anemometer neu am Fahrzeug angebracht oder neu eingestellt wurde, muss eine Versatzkalibrierungsprüfung durchgeführt werden.
- Überprüfung der Einrichtung des Fahrzeugs hinsichtlich Höhe und Geometrie, in Standardfahrhöhenposition:
- Mittelschwere und schwere Lastkraftwagen und Sattelzugmaschinen: Die maximale Fahrzeughöhe ist durch Messungen an den vier Ecken der Karosserie oder des Sattelanhängers zu bestimmen.
- Schwere Busse und mittelschwere Lastkraftwagen: Die maximale Fahrzeughöhe ist gemäß den technischen Anforderungen nach Anhang I der Verordnung (EU) Nr. 1230/2012 zu messen, wobei die in Anlage 1 des genannten Anhangs aufgeführten Einrichtungen und Ausrüstungen nicht berücksichtigt werden.
- Einstellung der Höhe des Sattelanhängers auf den Zielwert und ggf. erneute Bestimmung der Fahrzeughöhe.
- Spiegel oder optische Systeme, Luftleitkörper auf dem Dach oder andere aerodynamische Einrichtungen müssen sich in ihrer normalen Fahrstellung befinden.
Zum Warmlaufen des Systems muss das Fahrzeug mindestens 90 Minuten lang mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Zielgeschwindigkeit betrieben werden. Ein wiederholter Warmlauf (z.B. nach einer Konfigurationsänderung, einer ungültigen Prüfung usw.) muss mindestens so lange dauern wie die Stillstandszeit. Die Warmlaufphase kann genutzt werden, um die Versatzkalibrierungsprüfung gemäß Absatz 3.6 dieses Anhangs durchzuführen.
Ist es nicht möglich, die hohe Geschwindigkeit über eine ganze Runde aufrechtzuerhalten, z.B. weil die Kurven zu eng sind, darf in den Kurven sowie in den angrenzenden geraden Abschnitten, die zum Abbremsen und Beschleunigen des Fahrzeugs benötigt werden, von der Zielgeschwindigkeit abgewichen werden.
Abweichungen sind so weit wie möglich zu minimieren.
Alternativ kann die Warmlaufphase auch auf einer nahegelegenen Straße durchgeführt werden, wenn die Zielgeschwindigkeit 90 % der Warmlaufzeit bei ± 10 km/h gehalten wird. Der Teil der Warmlaufphase, der für die Fahrt von der Straße zum Stillstandbereich der Prüfstrecke zur Nullstellung der Drehmomentmesser verwendet wird, ist in die andere Warmlaufphase gemäß Nummer 3.5.3.4 einzubeziehen. Dieser Teil darf nicht mehr als 20 Minuten dauern. Die Geschwindigkeit und die Zeit während der Warmlaufphase sind von der Messeinrichtung aufzuzeichnen.
3.5.3.3. Nullstellung der Drehzahlmesser 22
Die Nullstellung der Drehzahlmesser ist wie folgt durchzuführen:
- Fahrzeug zum Stillstand bringen.
- Räder, an denen die Messgeräte angebracht sind, vom Boden abheben.
- Nullstellung der Verstärkeranzeige der Drehmomentmesser durchführen.
Die Stillstandsphase darf 15 Minuten nicht überschreiten.
3.5.3.4. Mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Solldrehzahl sind ein weiterer Warmlauf über mindestens 10 Minuten sowie gegebenenfalls die Fahrt von der Straße zum Stillstandbereich der Prüfstrecke zum Zwecke der Nullstellung der Drehmomentmesser durchzuführen. Die Warmlaufphase gemäß dieser Nummer darf nicht kürzer sein als die Stillstandszeit und 30 Minuten nicht überschreiten.
3.5.3.5. Erste Prüfung mit niedriger Geschwindigkeit 22
Durchführen der ersten Messung bei niedriger Geschwindigkeit. Folgendes ist sicherzustellen:
- Das Fahrzeug muss auf einer möglichst geraden Linie durch den Messabschnitt gefahren werden.
- Die durchschnittliche Fahrgeschwindigkeit im Messabschnitt und im davorliegenden Stabilisierungsabschnitt muss mit den in Absatz 3.5.1 dieses Anhangs angegebenen Werten übereinstimmen.
- Die Stabilität der Fahrgeschwindigkeit innerhalb der Mess- und der Stabilisierungsabschnitte muss die Kriterien in Absatz 3.10.1.1 Ziffer vii dieses Anhangs erfüllen.
- Die Stabilität des innerhalb der Mess- und der Stabilisierungsabschnitte gemessenen Drehmoments muss die Kriterien in Absatz 3.10.1.1 Ziffer viii dieses Anhangs erfüllen.
- Anfang und Ende der Messabschnitte müssen in den Messdaten durch ein aufgezeichnetes Auslösesignal (optoelektronische Schranken plus aufgezeichnete GPS-Daten) oder durch Verwendung eines DGPS-Systems klar erkennbar sein.
- Die Teile der Prüfstrecke, die außerhalb der Messabschnitte und der davorliegenden Stabilisierungsabschnitte liegen, sind ohne Verzögerung zu befahren. Während dieser Phasen sind unnötige Manöver (z.B. Fahren von Schlangenlinien) zu vermeiden.
- Die Prüfung mit niedriger Geschwindigkeit darf höchstens 20 Minuten dauern, um eine Abkühlung der Reifen zu verhindern.
- Jede Abbremsung vor Beginn der Prüfung bei niedriger Geschwindigkeit muss so erfolgen, dass die mechanische Betriebsbremse möglichst wenig beansprucht wird, d. h. durch Ausrollen oder Verwendung des Retarders.
3.5.3.6. Ein weiterer Warmlauf über mindestens 5 Minuten mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Zielgeschwindigkeit ist durchzuführen.
3.5.3.7. Prüfung mit hoher Geschwindigkeit
Durchführen der Messung bei hoher Geschwindigkeit. Folgendes ist sicherzustellen:
- Das Fahrzeug muss auf einer möglichst geraden Linie durch den Messabschnitt gefahren werden.
- Die durchschnittliche Fahrgeschwindigkeit im Messabschnitt und im davorliegenden Stabilisierungsabschnitt muss mit den in Absatz 3.5.2 dieses Anhangs angegebenen Werten übereinstimmen.
- Die Stabilität der Fahrgeschwindigkeit innerhalb der Mess- und der Stabilisierungsabschnitte muss die Kriterien in Absatz 3.10.1.1 Ziffer vii. dieses Anhangs erfüllen.
- Die Stabilität des innerhalb der Mess- und der Stabilisierungsabschnitte gemessenen Drehmoments muss die Kriterien in Absatz 3.10.1.1 Ziffer viii dieses Anhangs erfüllen.
- Anfang und Ende der Messabschnitte müssen in den Messdaten durch ein aufgezeichnetes Auslösesignal (optoelektronische Schranken plus aufgezeichnete GPS-Daten) oder durch Verwendung eines DGPS-Systems klar erkennbar sein.
- Während der Fahrphasen außerhalb der Messabschnitte und der davorliegenden Stabilisierungsabschnitte sind unnötige Manöver (z.B. Fahren von Schlangenlinien, unnötiges Beschleunigen oder Abbremsen) zu vermeiden.
- Der Abstand zwischen dem geprüften Fahrzeug und einem anderen auf der Prüfstrecke fahrenden Fahrzeug muss mindestens 500 m betragen.
- Mindestens zehn gültige Durchgänge pro Rubrik sind aufzuzeichnen.
Die Prüfung mit hoher Geschwindigkeit kann dazu dienen, den Versatz des Anemometers zu bestimmen, sofern die Bestimmungen in Absatz 3.6 erfüllt sind.
3.5.3.8. Zweite Prüfung mit niedriger Geschwindigkeit
Die zweite Prüfung mit niedriger Geschwindigkeit ist unmittelbar nach der Prüfung mit hoher Geschwindigkeit durchzuführen. Für diese Prüfung gelten dieselben Bestimmungen wie für die erste Prüfung mit niedriger Geschwindigkeit.
3.5.3.9. Driftüberprüfung der Drehmomentmesser
Unmittelbar nach Abschluss der zweiten Prüfung mit niedriger Geschwindigkeit ist die Driftüberprüfung der Drehmomentmesser entsprechend dem folgenden Verfahren durchzuführen:
- Fahrzeug zum Stillstand bringen.
- Räder, an denen die Messgeräte angebracht sind, vom Boden abheben.
- Die Drift jedes Drehmomentmessers, die aus dem Durchschnitt der Mindestsequenz von 10 Sekunden berechnet wird, muss unter 25 Nm betragen.
Wird dieser Grenzwert überschritten, ist die Prüfung ungültig.
3.6. Versatzkalibrierungsprüfung 19
Der Versatz des Anemometers ist durch eine Versatzkalibrierungsprüfung auf der Prüfstrecke zu bestimmen.
3.6.1. Mindestens fünf gültige Durchgänge für einen geraden Absatz mit einer Länge von 250 m ± 3 m, der in jeder Richtung mit hoher Fahrzeuggeschwindigkeit befahren wird, sind erforderlich.
3.6.2. Es gelten die Kriterien für die Gültigkeit die Windbedingungen gemäß Absatz 3.2.5 dieses Anhangs sowie die Kriterien für die Prüfstrecke gemäß Absatz 3.1 dieses Anhangs.
3.6.3. Die während der Versatzkalibrierungsprüfung aufgezeichneten Daten sind vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Berechnung des Versatzfehlers und zur Durchführung der entsprechenden Korrektur zu verwenden. Bei der Auswertung werden die Signale für die Raddrehmomente und die Motordrehzahl, die Kardanwellendrehzahl und die durchschnittliche Raddrehzahl nicht berücksichtigt.
3.6.4. Die Versatzkalibrierungsprüfung kann unabhängig vom Verfahren zur Prüfung mit konstanter Geschwindigkeit durchgeführt werden. Wird die Versatzkalibrierungsprüfung getrennt durchgeführt, ist folgendermaßen vorzugehen:
- Vorbereitung der optoelektronischen Schranken an dem 250 m (± 3 m) langen Messabschnitt oder Überprüfung der korrekten Funktion des DGPS-Systems.
- Überprüfung der Einrichtung des Fahrzeugs hinsichtlich Höhe und Geometrie gemäß Absatz 3.5.3.1 dieses Anhangs. Die Höhe des Sattelanhängers ist ggf. gemäß den Vorgaben in Anlage 4 dieses Anhangs anzupassen.
- Für den Warmlauf gibt es keine Vorgaben.
- Die Versatzkalibrierungsprüfung ist anhand von mindestens fünf gültigen Durchläufen (wie oben beschrieben) durchzuführen.
3.6.5. In folgenden Fällen ist eine neue Versatzkalibrierungsprüfung erforderlich:
- Das Anemometer wurde vom Fahrzeug entfernt.
- Das Anemometer wurde verschoben.
- Eine andere Sattelzugmaschine oder ein anderer Sololastkraftwagen wird verwendet.
- Die Luftwiderstandsfamilie wurde geändert
3.7. Prüfvorlage
Zusätzlich zur Aufzeichnung der modalen Messdaten ist die Prüfung in einer Vorlage zu dokumentieren, die mindestens die folgenden Daten enthält:
- allgemeine Fahrzeugbeschreibung (Spezifikationen siehe Anlage 2 - Informationsdokument)
- tatsächliche maximale Fahrzeughöhe, bestimmt gemäß Absatz 3.5.3.1 Ziffer vii.
- Datum und Uhrzeit des Prüfungsbeginns
- Fahrzeugmasse in einem Bereich von ± 500 kg
- Reifendrücke
- Namen der Messdatendateien
- Dokumentation außergewöhnlicher Ereignisse (mit Zeit und Anzahl der Messabschnitte), z.B.
- nahes Vorbeifahren eines anderen Fahrzeugs
- Manöver zur Verhinderung von Unfällen, Fahrfehler
- technische Fehler
- Messfehler.
3.8. Datenverarbeitung
3.8.1. Die aufgezeichneten Daten sind zu synchronisieren und mithilfe des arithmetischen Mittels, der Nearest-Neighbour-Interpolation oder der linearen Interpolation auf eine zeitliche Auflösung von 100 Hz auszurichten.
3.8.2. Alle aufgezeichneten Daten sind auf Fehler zu überprüfen. Messdaten sind in folgenden Fällen aus der weiteren Berücksichtigung auszuschließen:
- Datensätze wurden aufgrund von Ereignissen während der Messung ungültig (siehe Absatz 3.7 Ziffer vii);
- Geräteübersteuerung während Messabschnitten (z.B. starke Windböen, die eventuell zu einer Übersteuerung des Anemometersignals geführt haben);
- Messungen, in denen die zulässigen Grenzwerte für die Drift des Drehmomentmessers überschritten wurden.
3.8.3. Für die Auswertung der Prüfungen mit konstanter Geschwindigkeit muss unbedingt die neueste verfügbare Version des Instruments zur Vorverarbeitung der Luftwiderstandsdaten verwendet werden. Von der oben aufgeführten Datenverarbeitung abgesehen, werden alle Auswertungsschritte, einschließlich Gültigkeitsprüfungen (mit Ausnahme der oben genannten Liste), vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten ausgeführt.
3.9. Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten 19
Die folgenden Tabellen enthalten die Anforderungen für die Aufzeichnung von Messdaten und die vorbereitende Datenverarbeitung für die Eingabe in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten:
Tabelle 2 für die Datei der Fahrzeugdaten
Tabelle 3 für die Datei der Umgebungsbedingungen
Tabelle 4 für die Datei der Konfiguration der Messabschnitte
Tabelle 5 für die Datei der Messdaten
Tabelle 6 für die Datei des Höhenprofils (optionale Eingabedaten)
Eine ausführliche Beschreibung der geforderten Datenformate, der Eingabedateien und der Auswertungsgrundsätze ist in der technischen Dokumentation des Instruments zur Vorverarbeitung der Luftwiderstandsdaten zu finden.
Tabelle 2 Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten - Datei der Fahrzeugdaten 19 22
| Eingabedaten | Einheit | Anmerkungen |
| Code der Fahrzeuggruppe | [-] | 1 - 19 für schwere Lastkraftwagen gemäß Anhang I Tabelle 1 31a - 40f für schwere Busse gemäß Anhang I Tabellen 4 bis 6 51 - 56 für mittelschwere Lastkraftwagen gemäß Anhang I Tabelle 2 |
| Fahrzeugkonfiguration mit Anhänger | [-] | Wenn das Fahrzeug ohne Anhänger (Eingabe "Nein") oder mit Anhänger, d. h. als Kombination aus Sattelzugmaschine und Sattelanhänger (Eingabe "Ja"), gemessen wurde. |
| Fahrzeugprüfmasse | [kg] | Tatsächliche Masse während der Messungen |
| Technisch zulässige Gesamtmasse im beladenen Zustand | [kg] | schwere Lastkraftwagen: technisch zulässige Gesamtmasse im beladenen Zustand des Sololastkraftwagens oder der Sattelzugmaschine (ohne Anhänger oder Sattelanhänger) alle anderen Fahrzeugklassen: kein Eintrag |
| Achsübersetzung | [-] | Achsübersetzungsverhältnis 1 2 |
| Gangübersetzung hohe Geschwindigkeit | [-] | Übersetzungsverhältnis des während der Prüfung mit hoher Geschwindigkeit eingelegten Gangs 1 4 |
| Gangübersetzung niedrige Geschwindigkeit | [-] | Übersetzungsverhältnis des während der Prüfung mit niedriger Geschwindigkeit eingelegten Gangs 1 4 |
| Anemometerhöhe | [m] | Höhe über dem Boden des Messpunkts des installierten Anemometers |
| Fahrzeughöhe | [m] | Mittelschwere und schwere Lastkraftwagen und Sattelzugmaschinen: maximale Fahrzeughöhe gemäß Nummer 3.5.3.1 Ziffer vii alle anderen Fahrzeugklassen: kein Eintrag |
| Festes Übersetzungsverhältnis bei Prüfung mit niedriger Geschwindigkeit | [-] | "ja"/"nein" (bei Fahrzeugen, die nicht in der Lage sind, die Prüfung mit niedriger Geschwindigkeit mit verriegeltem Drehmomentwandler zu durchlaufen) |
| Fahrzeughöchstgeschwindigkeit | [km/h] | Höchstgeschwindigkeit, mit der das Fahrzeug beim praktischen Test auf der Prüfstrecke betrieben werden kann 3 |
| Drift des Drehmomentmessers linkes Rad | [Nm] | Durchschnittliche Ablesewerte des Drehmomentmessers gemäß Nummer 3.5.3.9 |
| Drift des Drehmomentmessers rechtes Rad | [Nm] | |
| Zeitstempel der Nullstellung der Drehmomentmesser | [s] seit Tagesbeginn (des ersten Tages) | |
| Zeitstempel der Driftüberprüfung der Drehmomentmesser | ||
| 1) Angabe der Übersetzungsverhältnisse mit mindestens drei Stellen nach dem Dezimalzeichen.
2) Wenn entweder das Signal für die Kardanwellendrehzahl oder das Signal für die durchschnittliche Raddrehzahl für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung gestellt wird (siehe Nummer 3.4.3; Option 1 für Fahrzeuge mit Drehmomentwandler oder Option 2), muss der Eingabeparameter für die Achsübersetzung auf "1.000" gesetzt werden. 3) Eine Eingabe ist nur erforderlich, wenn der Wert niedriger als 88 km/h ist. 4) Wenn die durchschnittliche Raddrehzahl für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung gestellt wird (siehe Nummer 3.4.3 Option 2), muss der Eingangsparameter für die Gangübersetzung auf "1.000" gesetzt werden. | ||
Tabelle 3 Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten - Datei der Umgebungsbedingungen
| Signal | Spaltenkennung in Eingabedatei | Einheit | Messrate | Anmerkungen |
| Zeit | < t > | [s] seit Tagesbeginn (erster Tag) | - | - |
| Umgebungstemperatur | < t_amb_stat > | [°C] | Mindestens 1 gemittelter Wert pro 6 Minuten | Stationäre Wetterstation |
| Umgebungsdruck | < p_amb_stat > | [mbar] | Stationäre Wetterstation | |
| Relative Luftfeuchtigkeit | < rh_stat > | [%] | Stationäre Wetterstation |
Tabelle 4 Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten - Datei der Konfiguration der Messabschnitte 19
| Eingabedaten | Einheit | Anmerkungen |
| Verwendung des Auslösesignals | [-] | 1 = Auslösesignal verwendet; 0 = Auslösesignal nicht verwendet |
| ID des Messabschnitts | [-] | Benutzerdefinierte Kennnummer |
| ID der Fahrtrichtung | [-] | Benutzerdefinierte Kennnummer |
| Kurs | [°] | Kurs des Messabschnitts |
| Länge des Messabschnitts | [m] | - |
| Breite Startpunkt des Abschnitts | Dezimalgrade oder Dezimalminuten | Standard-GPS, Einheit Dezimalgrade:
mindestens 5 Stellen nach dem Dezimalzeichen |
| Länge Startpunkt des Abschnitts | Standard-GPS, Einheit Dezimalminuten:
Mindestens 3 Stellen nach dem Dezimalzeichen | |
| Breite Endpunkt des Abschnitts | DGPS, Einheit Dezimalgrade:
Mindestens 7 Stellen nach dem Dezimalzeichen | |
| Länge Endpunkt des Abschnitts | DGPS, Einheit Dezimalminuten:
mindestens 5 Stellen nach dem Dezimalzeichen | |
| Pfad und/oder Dateiname der Datei der Höhenwerte | [-] | Nur für die Prüfungen mit konstanter Geschwindigkeit (nicht für die Versatzkalibrierungsprüfung) erforderlich und nur, wenn die Höhenkorrektur aktiviert ist |
Tabelle 5 Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten - Datei der Messdaten 22
| Signal | Spaltenkennung in Eingabedatei | Einheit | Messrate | Anmerkungen |
| Zeit | < t > | [s] seit Tagesbeginn (des ersten Tages) | 100 Hz | Rate auf 100 Hz festgelegt; Verwendung des Zeitsignals für die Korrelation mit den Wetterdaten und für die Überprüfung der Frequenz |
| Breite (D)GPS | < lat > | Dezimalgrade oder Dezimalminuten | GPS: ≥ 4 Hz
DGPS: ≥100 Hz | Standard-GPS, Einheit Dezimalgrade:
mindestens 5 Stellen nach dem Dezimalzeichen |
| Länge (D)GPS | < long > | Standard-GPS, Einheit Dezimalminuten:
Mindestens 3 Stellen nach dem Dezimalzeichen DGPS, Einheit Dezimalgrade: Mindestens 7 Stellen nach dem Dezimalzeichen DGPS, Einheit Dezimalminuten: mindestens 5 Stellen nach dem Dezimalzeichen | ||
| Kurs (D)GPS | < hdg > | [°] | ≥ 4 Hz | |
| Geschwindigkeit DGPS | < v_veh_GPS > | [km/h] | ≥ 20 Hz | |
| Fahrzeuggeschwindigkeit | < v_veh_CAN > | [km/h] | ≥ 20 Hz | CAN-Bus-Rohsignal von der Vorderachse |
| Luftgeschwindigkeit | < v_air > | [m/s] | ≥ 4 Hz | Rohdaten (Instrumentenablesung) |
| Anströmwinkel (Beta) | < beta > | [°] | ≥ 4 Hz | Rohdaten (Instrumentenablesung); "180°" bezieht sich auf den Luftstrom von vorne |
| Motordrehzahl, Kardanwellendrehzahl, durchschnittliche Raddrehzahl oder Elektromotordrehzahl | <n_eng>, <n_card>, <n_wheel_ave> oder <n_EM> | [rpm] | ≥ 20 Hz | Siehe die Bestimmungen in Nummer 3.4.3 |
| Drehmomentmesser (linkes Rad) | < tq_l > | [Nm] | ≥ 20 Hz | - |
| Drehmomentmesser (rechtes Rad) | < tq_r > | [Nm] | ≥ 20 Hz | |
| Umgebungstemperatur am Fahrzeug | < t_amb_veh > | [°C] | ≥ 1 Hz | |
| Auslösesignal | < trigger > | [] | 100 Hz | Optionales Signal; erforderlich, wenn die Messabschnitte mithilfe von optoelektronischen Barrieren erkannt werden (Option "trigger_used=1") |
| Temperatur des Prüfgeländes | < t_ground > | [°C] | ≥ 1 Hz | |
| Gültigkeit | < valid > | [] | - | Optionales Signal (1 = gültig; 0 = ungültig) |
Tabelle 6 Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten - Datei des Höhenprofils
| Eingabedaten | Einheit | Anmerkungen |
| Breite | Dezimalgrade oder Dezimalminuten | Einheit Dezimalgrade:
Mindestens 7 Stellen nach dem Dezimalzeichen |
| Länge | Einheit Dezimalminuten:
mindestens 5 Stellen nach dem Dezimalzeichen | |
| Höhe | [m] | Mindestens 2 Stellen nach dem Dezimalzeichen |
In diesem Abschnitt werden die Kriterien für den Erhalt gültiger Ergebnisse im Instrument zur Vorverarbeitung der Luftwiderstandsdaten beschrieben.
3.10.1. Gültigkeitskriterien für die Prüfung mit konstanter Geschwindigkeit 22
3.10.1.1. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten akzeptiert die während der Prüfung mit konstanter Geschwindigkeit aufgezeichneten Datensätze, wenn die folgenden Gültigkeitskriterien erfüllt sind:
- Die durchschnittliche Fahrzeuggeschwindigkeit liegt innerhalb der in 3.5.2 definierten Kriterien.
- Die Umgebungstemperatur liegt innerhalb des in 3.2.2 angegebenen Bereichs. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Basis der am Fahrzeug gemessenen Umgebungstemperatur überprüft.
- Die Temperatur des Prüfgeländes liegt innerhalb des in 3.2.3 angegebenen Bereichs.
- Gültige durchschnittliche Windgeschwindigkeit gemäß Nummer 3.2.5 Ziffer i.
- Gültige Böengeschwindigkeit gemäß Nummer 3.2.5 Ziffer ii.
- Gültiger durchschnittlicher Gierwinkel gemäß Nummer 3.2.5 Ziffer iii.
- Stabilitätskriterien für die Fahrzeuggeschwindigkeit erfüllt:
Prüfung mit niedriger Geschwindigkeit:
( vlms,avrg - 0,5km/h) ≤ Vlm,avrg≤ (vlms,avrg+ 0,5km/h)
dabei gilt:
vlms,avrg = durchschnittliche Fahrzeuggeschwindigkeit pro Messabschnitt [km/h] vlm,avrg = zentraler gleitender Durchschnitt der Fahrzeuggeschwindigkeit mit einer Zeitbasis von XmsSekunden Sekunden [km/h] Xms = benötigte Zeit, um eine Distanz von 25 m bei tatsächlicher Fahrzeuggeschwindigkeit zurückzulegen [s] Prüfung mit hoher Geschwindigkeit:
( vhms,avrg-0,3km/h) ≤ vhm,avrg ≤ (vhms,avrg+ 0,3km/h)
dabei gilt:
vhms,avrg = durchschnittliche Fahrzeuggeschwindigkeit pro Messabschnitt [km/h] vhm,avrg = 1 s zentraler gleitender Durchschnitt der Fahrzeuggeschwindigkeit [km/h] - Stabilitätskriterien für das Fahrzeugdrehmoment erfüllt:
Prüfung mit niedriger Geschwindigkeit:
( T lms,avrg - T grd) × (1 - tol) ≤ (T lms,avrg - T grd) ≤ (T lms,avrg - T grd) × (1 + tol)
T grd = F grd,avrg × r dyn,avrg
Dabei gilt:
Tlms,avrg = Durchschnitt von Tsum pro Messabschnitt Tgrd = durchschnittliches Drehmoment aus der Gradientkraft Fgrd,avrg = durchschnittliche Gradientkraft über den Messabschnitt rdyn,avrg = durchschnittlicher effektiver Rollradius über den Messabschnitt (Formel siehe Ziffer xi) [m] Tsum = TL + TR; Summe der korrigierten Drehmomentwerte des linken und des rechten Rades [Nm] T lm,avrg = zentraler gleitender Durchschnitt von Tsum mit einer Zeitbasis von Xms Sekunden Xms = benötigte Zeit, um eine Distanz von 25 m bei tatsächlicher Fahrzeuggeschwindigkeit zurückzulegen [s] tol = relative Drehmomenttoleranz: 0,5 für mittelschwere und schwere Lastkraftwagen der Gruppen 1s, 1 und 2; 0,3 für schwere Lastkraftwagen anderer Gruppen sowie schwere Busse. - Gültiger Kurs des Fahrzeugs beim Durchfahren eines Messabschnitts (< 10° Abweichung vom Zielkurs für die Prüfung mit niedriger Geschwindigkeit, die Prüfung mit hoher Geschwindigkeit und die Versatzkalibrierungsprüfung).
- Die anhand der kalibrierten Fahrzeuggeschwindigkeit berechnete zurückgelegte Distanz innerhalb des Messabschnitts weicht von der Zieldistanz nicht um mehr als 3 Meter ab (gilt für die Prüfung mit niedriger Geschwindigkeit und die Prüfung mit hoher Geschwindigkeit).
- Plausibilitätsprüfung der Motordrehzahl, der Kardanwellendrehzahl oder der durchschnittlichen Raddrehzahl, abhängig davon, welche anwendbar ist:
Überprüfung der Motordrehzahl oder durchschnittlichen Raddrehzahl für die Prüfung mit hoher Geschwindigkeit:
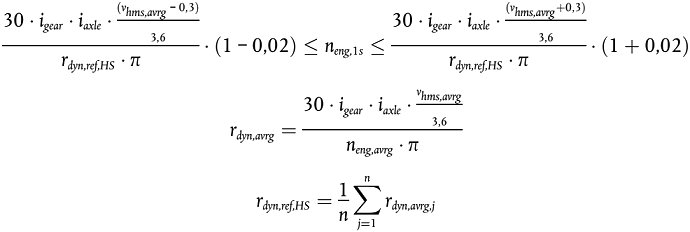
Dabei ist: igear = Übersetzungsverhältnis des in der Prüfung mit hoher Geschwindigkeit gewählten Gangs [-] iaxle = Achsübersetzungsverhältnis [-] vhms,avrg = durchschnittliche Fahrzeuggeschwindigkeit (Messabschnitt mit hoher Geschwindigkeit) [km/h] neng,1s = 1 s zentraler gleitender Durchschnitt der Motordrehzahl oder durchschnittlichen Raddrehzahl (Messabschnitt mit hoher Geschwindigkeit) [U/min] neng,avrg = Durchschnitt der Motordrehzahl oder durchschnittlichen Raddrehzahl (Messabschnitt mit hoher Geschwindigkeit) [U/min] rdyn,avrg = durchschnittlicher effektiver Rollradius für einen einzelnen Messabschnitt mit hoher Geschwindigkeit [m] rdyn,ref,HS = Bezugswert des effektiven Rollradius, berechnet aus allen gültigen Messabschnitten mit hoher Geschwindigkeit (Anzahl = n) [m] Überprüfung der Motordrehzahl oder durchschnittlichen Raddrehzahl für die Prüfung mit niedriger Geschwindigkeit:
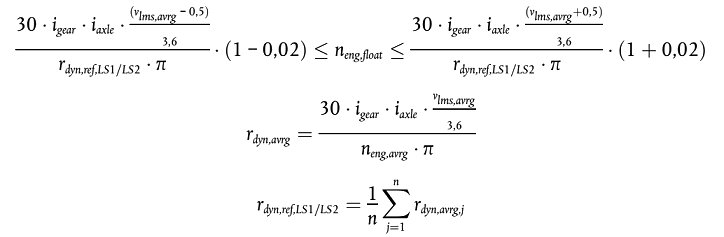
Dabei ist: igear = Übersetzungsverhältnis des in der Prüfung mit niedriger Geschwindigkeit gewählten Gangs [-] iaxle = Achsübersetzungsverhältnis [-] vlms,avrg = durchschnittliche Fahrzeuggeschwindigkeit (Messabschnitt mit niedriger Geschwindigkeit) [km/h] neng,float = zentraler gleitender Durchschnitt der Motordrehzahl oder durchschnittlichen Raddrehzahl mit einer Zeitbasis von Xms Sekunden (Messabschnitt mit niedriger Geschwindigkeit) [U/min] neng,avrg = Durchschnitt der Motordrehzahl oder durchschnittlichen Raddrehzahl (Messabschnitt mit niedriger Geschwindigkeit) [U/min] Xms = benötigte Zeit, um eine Distanz von 25 Metern bei niedriger Geschwindigkeit zurückzulegen [s] rdyn,avrg = durchschnittlicher effektiver Rollradius für einen einzelnen Messabschnitt mit niedriger Geschwindigkeit [m] rdyn,ref,LS1/LS2 = Bezugswert des effektiven Rollradius, berechnet aus allen gültigen Messabschnitten für die erste Prüfung mit niedriger Geschwindigkeit oder die zweite Prüfung mit niedriger Geschwindigkeit (Anzahl = n) [m] Die Plausibilitätsprüfung für die Drehzahl der Kardanwelle wird analog durchgeführt, wobei neng,1s durch ncard,1s (1 s zentraler gleitender Durchschnitt der Kardanwellendrehzahl im Messabschnitt mit hoher Geschwindigkeit) und neng,floatdurch ncard,float (gleitender Durchschnitt der Kardanwellendrehzahl mit einer Zeitbasis von XmsSekunden im Messabschnitt mit niedriger Geschwindigkeit) ersetzt und igearauf den Wert 1 eingestellt wird.
- Der jeweilige Teil der Messdaten wurde in der Eingabedatei für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten nicht als "ungültig" gekennzeichnet.
3.10.1.2. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten schließt einzelne Datensätze aus der Auswertung aus, wenn die Anzahl von Datensätzen für eine bestimmte Kombination von Messabschnitt und Fahrtrichtung für die erste und die zweite Prüfung mit niedriger Geschwindigkeit nicht übereinstimmt. In diesem Fall werden die ersten Datensätze aus dem Durchlauf mit niedriger Geschwindigkeit, der eine höhere Anzahl von Datensätzen aufweist, ausgeschlossen.
3.10.1.3. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten schließt einzelne Kombinationen von Messabschnitt und Fahrtrichtung in folgenden Fällen aus der Auswertung aus:
- Aus der ersten und/oder der zweiten Prüfung mit niedriger Geschwindigkeit ist kein gültiger Datensatz verfügbar.
- Es sind weniger als zwei gültige Datensätze aus der Prüfung mit hoher Geschwindigkeit vorhanden.
3.10.1.4. In folgenden Fällen wird die gesamte Prüfung mit konstanter Geschwindigkeit vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten als ungültig betrachtet:
- Die in 3.1.1 beschriebenen Anforderungen an die Prüfstrecke sind nicht erfüllt.
- Es sind weniger als 10 Datensätze pro Kurs vorhanden (Prüfung mit hoher Geschwindigkeit).
- Es sind weniger als 5 gültige Datensätze pro Kurs vorhanden (Versatzkalibrierungsprüfung).
- Die Rollwiderstandskoeffizienten (RRC) für die erste und die zweite Prüfung mit niedriger Geschwindigkeit weichen um mehr als 0,40 kg/t ab. Dieses Kriterium wird für jede Kombination von Messabschnitt und Fahrtrichtung getrennt überprüft.
3.10.2. Gültigkeitskriterien für die Versatzkalibrierungsprüfung
3.10.2.1. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten akzeptiert die während der Versatzkalibrierungsprüfung aufgezeichneten Datensätze, wenn die folgenden Gültigkeitskriterien erfüllt sind:
- Die durchschnittliche Fahrzeuggeschwindigkeit liegt innerhalb der für die Prüfung mit hoher Geschwindigkeit in 3.5.2 definierten Kriterien.
- Gültige durchschnittliche Windgeschwindigkeit gemäß Nummer 3.2.5 Ziffer i.
- Gültige Böengeschwindigkeit gemäß Nummer 3.2.5 Ziffer ii.
- Gültiger durchschnittlicher Gierwinkel gemäß Nummer 3.2.5 Ziffer iii.
- Stabilitätskriterien für die Fahrzeuggeschwindigkeit erfüllt:
( vhms,avrg - 1km/h) ≤ vhm,avrg≤ (vhms,avrg + 1km/h)
dabei gilt:
| vhms,avrg | = durchschnittliche Fahrzeuggeschwindigkeit pro Messabschnitt [km/h] |
| vhm,avrg | = 1 s zentraler gleitender Durchschnitt der Fahrzeuggeschwindigkeit [km/h] |
3.10.2.2. In folgenden Fällen werden die Daten aus einem einzelnen Messabschnitt vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten als ungültig betrachtet:
- Die durchschnittlichen Fahrzeuggeschwindigkeiten aus allen gültigen Datensätzen für jede Fahrtrichtung weichen um mehr als 2 km/h ab.
- Es sind weniger als 5 Datensätze pro Kurs vorhanden.
3.10.2.3. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten betrachtet die gesamte Versatzkalibrierungsprüfung als ungültig, wenn kein gültiges Ergebnis für einen einzelnen Messabschnitt verfügbar ist.
3.11. Angabe des Luftwiderstandswerts 19 22
Basiswert für die Angabe des Luftwiderstandswerts ist das Endergebnis für Cd · Acr (0) gemäß der Berechnung des Instruments zur Vorverarbeitung der Luftwiderstandsdaten. Von dem die Zertifizierung beantragenden Antragsteller muss ein Wert für Cd · Adeclaredangegeben werden, der in folgendem Bereich liegt: von gleich Cd · Acr (0)bis maximal +0,2 m2 höher als dieser Wert. Mit dieser Toleranz werden die Unsicherheiten berücksichtigt, die sich aus der Wahl der Stammfahrzeuge für den ungünstigsten Fall aller zu prüfenden Fahrzeuge aus der jeweiligen Fahrzeugfamilie ergeben. Der Wert Cd · Adeclareddient als Eingabe für das Simulationsinstrument und als Bezugswert für die Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften.
Mehrere angegebene Werte für Cd· Adeclared können auf Grundlage eines einzelnen gemessenen Werts für Cd· Acr (0) erzeugt werden, solange die für die Familie gemäß Anlage 5 Nummer 3.1 für mittelschwere und schwere Lastkraftwagen und gemäß Anlage 5 Nummer 4.1 für schwere Busse geltenden Bestimmungen erfüllt sind.
_____
*) Zumindest für die Versatzkorrektur des mobilen Anemometers (siehe 3.6) muss die Prüfstrecke in beiden Richtungen befahrbar sein.
1) Regelung Nr. 54 der Wirtschaftskommission der Vereinten Nationen für Europa (UN/ECE) - Einheitliche Bedingungen für die Genehmigung der Luftreifen für Nutzfahrzeuge und ihre Anhänger (ABl. L 183 vom 11.07.2008 S. 41).
| Muster einer Bescheinigung für ein Bauteil, eine selbstständige technische Einheit oder ein System | Anlage 1 |
Größtformat: A4 (210 × 297 mm)
Bescheinigung der für die CO2-Emissionen und den Kraftstoffverbrauch massgeblichen Eigenschaften einer Luftwiderstandsfamilie
Mitteilung über:
|
|
einer Zertifizierung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen Eigenschaften einer Luftwiderstandsfamilie gemäß Verordnung (EU) 2017/2400 der Kommission.
Verordnung (EU) 2017/2400 der Kommission, zuletzt geändert durch ...
Zertifizierungsnummer:
Hash:
Grund für die Erweiterung:
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Fahrzeugaufbau und Luftwiderstandstyp/-familie (falls zutreffend):
0.3. Fahrzeugaufbau und Mitglied der Luftwiderstandsfamilie (im Falle einer Familie):
0.3.1. Fahrzeugaufbau und Luftwiderstandsstamm:
0.3.2. Fahrzeugaufbau und Luftwiderstandstypen innerhalb der Familie:
0.4. Merkmale zur Typidentifizierung, sofern vorhanden:
0.4.1. Anbringungsstelle dieser Merkmale:
0.5. Name und Anschrift des Herstellers:
0.6. Bei Bauteilen und selbstständigen technischen Einheiten Lage und Anbringungsart des EG-Zertifizierungszeichens:
0.7. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.9. (ggf.) Name und Anschrift des Bevollmächtigten des Herstellers
1. Zusätzliche Angaben (soweit vorhanden): siehe Beiblatt
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts:
4. Nummer des Prüfberichts:
5. Bemerkungen (sofern vorhanden): siehe Beiblatt
6. Ort:
7. Datum:
8. Unterschrift:
Anlagen
Beschreibungsmappe, Prüfbericht
| Beschreibungsbogen für Luftwiderstand | Anlage 2 19 |
|
| ||
| NNr. des Beschreibungsbogens: | Ausgabe: | |
| vom: | ||
| Änderung: | ||
| gemäß ... | ||
| Luftwiderstandstyp oder -familie (falls zutreffend):
Allgemeine Anmerkung:
Für die Eingabedaten für das Simulationsinstrument muss ein elektronisches Dateiformat für den Datenimport in dieses Instrument definiert werden.
Die Eingabedaten für das Instrument können sich von den im Beschreibungsbogen verlangten Daten unterscheiden und umgekehrt (ist festzulegen). Eine Datendatei ist insbesondere dann erforderlich, wenn große Datenmengen wie Wirkungsgradkennfelder zu bearbeiten sind (keine manuelle Übermittlung/Eingabe notwendig). | ||
| ... | ||
0.0. Allgemeines
0.1. Name und Anschrift des Herstellers
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Luftwiderstandstyp (ggf. Familie)
0.4. Handelsname(n) (sofern vorhanden)
0.5. Kennzeichen zur Typidentifizierung, sofern am Fahrzeug vorhanden
0.6. Bei Bauteilen und selbständigen technischen Einheiten Lage und Anbringungsart des Zertifizierungszeichens
0.7. Name(n) und Anschrift(en) der Fertigungsstätte(n)
0.8. Name und Anschrift des Bevollmächtigten
Teil 1
Wesentliche Merkmale des (Stamm-) Luftwiderstands und der Luftwiderstandstypen innerhalb einer Luftwiderstandsfamilie 22
|
| |
Stammluftwiderstand |
| |
Familienmitglied | | | |||||||||
|
| |
oder Luftwiderstandstyp |
| |
#1 |
| | #2 | | | #3 | | | |||||
|
| |||||||||||||
1.0. Spezifische Luftwiderstandsinformationen
1.1.0. Fahrzeug
1.1.1. Gruppe der schweren Nutzfahrzeuge gemäß CO2-Schema für schwere Nutzfahrzeuge
1.2.0. Fahrzeugmodell/Handelsname
1.2.1. Achsenkonfiguration
1.2.2. Technisch zulässige Gesamtmasse im beladenen Zustand
1.2.3. Fahrerhaus- oder Modellreihe
1.2.4. Fahrerhausbreite (Höchstwert in Y-Richtung, für Fahrzeuge mit Fahrerhaus)
1.2.5. Fahrerhauslänge (Höchstwert in X-Richtung, für Fahrzeuge mit Fahrerhaus)
1.2.6. Dachhöhe (für Fahrzeuge mit Fahrerhaus)
1.2.7. Radstand
1.2.8. FFahrerhaushöhe über dem Rahmen (für Fahrzeuge mit Rahmen)
1.2.9. Rahmenhöhe (für Fahrzeuge mit Rahmen)
1.2.10. Aerodynamisches Zubehör (z.B. Dachspoiler, Seitenspoiler, Seitenschweller, Eck-Luftleitbleche)
1.2.11. Reifenabmessungen Vorderachse
1.2.12. Reifenabmessungen Antriebsachsen
1.2.13. Fahrzeugbreite gemäß Anhang III Nummer 2 Absatz 8 (für Fahrzeuge ohne Fahrerhaus)
1.2.14. Fahrzeuglänge gemäß Anhang III Nummer 2 Absatz 7 (für Fahrzeuge ohne Fahrerhaus)
1.2.15. Höhe der integrierten Karosserie gemäß Anhang III Nummer 2 Absatz 5 (für Fahrzeuge ohne Fahrerhaus)
1.3. Aufbauspezifikationen (gemäß der Definition für den Normaufbau)
1.4. Spezifikationen zum Anhänger (Sattelanhänger) (gemäß der Spezifikation für den Normanhänger (Norm-Sattelanhänger)
1.5. Parameter zur Definition der Familie gemäß der Beschreibung des Antragstellers (Kriterien des Stamms und abgeleitete Familienkriterien)
| Liste der Anlagen | |
| Nr.: Beschreibung: | Ausstellungsdatum: |
| 1. Angaben zu den Prüfbedingungen ... | ... |
| 2. ... | |
Anlage 1 zum Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
1.1. Prüfstrecke, auf der die Prüfungen durchgeführt wurden:
1.2. Gesamtfahrzeugmasse während der Messung [kg]:
1.3. Maximale Fahrzeughöhe während der Messung [m]:
1.4. Durchschnittliche Umgebungsbedingungen während der ersten Prüfung mit niedriger Geschwindigkeit [ °C]:
1.5. Durchschnittliche Fahrzeuggeschwindigkeit während der Prüfungen mit hoher Geschwindigkeit [km/h]:
1.6. Produkt aus dem Luftwiderstandskoeffizienten (Cd) und der Querschnittsfläche (Acr) bei fehlendem Seitenwind CdAcr(0) [m2]:
1.7. Produkt aus dem Luftwiderstandskoeffizienten (Cd) und der Querschnittsfläche (Acr) für durchschnittliche Seitenwindbedingungen während der Prüfung mit konstanter Geschwindigkeit CdAcr(β) [m2]:
1.8. Durchschnittlicher Gierwinkel während der Prüfung mit konstanter Geschwindigkeit β[°]:
1.9. Angegebener Luftwiderstandswert Cd· Adeclared [m2]:
1.10. Versionsnummer des Instruments zur Vorverarbeitung der Luftwiderstandsdaten
| Anforderungen an die Fahrzeughöhe bei Sololastkraftwagen und Sattelzugmaschinen | Anlage 3 19 22 |
1. Mittelschwere Sololastkraftwagen, schwere Sololastkraftwagen und Sattelzugmaschinen, für die Messungen während der Prüfung mit konstanter Geschwindigkeit gemäß Nummer 3 dieses Anhangs durchgeführt werden, müssen die in Tabelle 2 angegebenen Anforderungen an die Fahrzeughöhe erfüllen.
2. Die Fahrzeughöhe ist gemäß Nummer 3.5.3.1 Ziffer vii zu bestimmen.
3. Schwere Sololastkraftwagen und Sattelzugmaschinen der nicht in Tabelle 2 aufgeführten Fahrzeuggruppen unterliegen nicht der Prüfung mit konstanter Geschwindigkeit.
Tabelle 2 Anforderungen an die Fahrzeughöhe bei mittelschweren Sololastkraftwagen, schweren Sololastkraftwagen und Sattelzugmaschinen 19 22
| Fahrzeuggruppe | Minimale Fahrzeughöhe [m] | Maximale Fahrzeughöhe [m] |
| 51, 53, 55 | 3,20 | 3,50 |
| 1 s, 1 | 3,40 | 3,60 |
| 2 | 3,50 | 3,75 |
| 3 | 3,70 | 3,90 |
| 4 | 3,85 | 4,00 |
| 5 | 3,90 | 4,00 |
| 9 | Ähnliche Werte wie für Sololastkraftwagen mit derselben technisch zulässigen Gesamtmasse in beladenem Zustand (Gruppe 1, 2, 3 oder 4) | |
| 10 | 3,90 | 4,00 |
| Konfigurationen mit Standardkarosserien und Standard-Sattelanhängern bei Sololastkraftwagen und Sattelzugmaschinen | Anlage 4 22 |
1. Mittelschwere und schwere Sololastkraftwagen, die der Bestimmung des Luftwiderstands unterliegen, müssen die Anforderungen an Standardkarosserien gemäß dieser Anlage erfüllen. Sattelzugmaschinen müssen die Anforderungen an Standard-Sattelanhänger gemäß dieser Anlage erfüllen.
2. Die anwendbare Standardkarosserie oder der anwendbare Standard-Sattelanhänger ist anhand Tabelle 8 zu bestimmen.
Tabelle 8 Zuordnung von Standardkarosserien und Standard-Sattelanhängern für die Prüfung mit konstanter Geschwindigkeit 22
| Fahrzeuggruppen | Standardkarosserie oder Standard-Sattelanhänger |
| 51, 53, 55 | B-II |
| 1 s, 1 | B1 |
| 2 | B2 |
| 3 | B3 |
| 4 | B4 |
| 5 | ST1 |
| 9 | Abhängig von der technisch zulässigen Gesamtmasse in beladenem Zustand: 7,5 - 10 t: B1 > 10 - 12 t: B2 > 12 - 16 t: B3 > 16t: B5 |
| 10 | ST1 |
3. Die Standardkarosserien B-II, B1, B2, B3, B4 und B5 müssen als Hartschalen-Aufbauten in Trockenausführung des Kastens konzipiert werden. Sie sind mit zwei Hecktüren und ohne Seitentüren auszustatten. Die Standardkarosserien dürfen keine Hebebühnen am Heck und keine Frontspoiler oder seitlichen Luftleitkörper zur Verringerung des Luftwiderstands aufweisen. Die Spezifikationen der Standardkarosserien sind in den folgenden Tabellen enthalten:
Tabelle 9a für Standardkarosserie "B-II"
Tabelle 9 für Standardkarosserie "B1"
Tabelle 10 für Standardkarosserie "B2"
Tabelle 11 für Standardkarosserie "B3"
Tabelle 12 für Standardkarosserie "B4"
Tabelle 13 für Standardkarosserie "B5"
Die Massenangaben in Tabelle 9a bis Tabelle 15 sind nicht Gegenstand der auf die Luftwiderstandsprüfung bezogenen Untersuchung.
4. Die Anforderungen an Typ und Fahrgestell für den Standard-Sattelanhänger ST1 sind in Tabelle 14 aufgeführt. Die Spezifikationen sind in Tabelle 15 enthalten.
5. Alle Abmessungen und Massen, für die nicht ausdrücklich Toleranzen angegeben sind, müssen die in der Verordnung (EU) Nr. 1230/2012 in Anhang 1, Anlage 2 genannten Toleranzen erfüllen (d. h., sie müssen innerhalb des Bereichs von ± 3 % des Zielwerts liegen).
Tabelle 9 Spezifikationen der Standardkarosserie "B1" 22
| Spezifikation | Einheit | Außenmaß (Toleranz) | Anmerkungen |
| Länge | [mm] | 6.200 | |
| Breite | [mm] | 2.550 (- 10) | |
| Höhe | [mm] | 2.680 (± 10) | Kasten:
Außenhöhe 2.560
Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 50 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 50 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 1.600 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 9a: Spezifikationen der Standardkarosserie "B-II" 22
| Spezifikation | Einheit | Außenmaß (Toleranz) | Anmerkungen |
| Länge | [mm] | 4.500 (± 10) | |
| Breite | [mm] | 2.300 (± 10) | |
| Höhe | [mm] | 2.500 (± 10) | Kasten: Außenhöhe: 2.380 Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 30 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 30 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 800 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 10 Spezifikationen der Standardkarosserie "B2" 22
| Spezifikation | Einheit | Außenmaß (Toleranz) | Anmerkungen |
| Länge | [mm] | 7.400 | |
| Breite | [mm] | 2.550 (- 10) | |
| Höhe | [mm] | 2.760 (± 10) | Kasten:
Außenhöhe 2.640
Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 50 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 50 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 1.900 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 11 Spezifikationen der Standardkarosserie "B3" 22
| Spezifikation | Einheit | Außenmaß (Toleranz) | Anmerkungen |
| Länge | [mm] | 7.450 | |
| Breite | [mm] | 2.550 (- 10) | Gesetzlicher Grenzwert (Richtlinie 96/53/EG), innen ≥ 2.480 |
| Höhe | [mm] | 2.880 (± 10) | Kasten:
Außenhöhe 2.760
Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 50 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 50 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 2.000 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 12 Spezifikationen der Standardkarosserie "B4" 22
|
Spezifikation | Einheit | Außenmaß (Toleranz) |
Anmerkungen |
| Länge | [mm] | 7.450 | |
| Breite | [mm] | 2.550 (- 10) | |
| Höhe | [mm] | 2.980 (± 10) | Kasten:
Außenhöhe 2.860
Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 50 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 50 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 2.100 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 13 Spezifikationen der Standardkarosserie "B5" 22
|
Spezifikation | Einheit | Außenmaß (Toleranz) |
Anmerkungen |
| Länge | [mm] | 7.820 | innen ≥ 7.650 |
| Breite | [mm] | 2.550 (- 10) | Gesetzlicher Grenzwert (Richtlinie 96/53/EG), innen ≥ 2.460 |
| Höhe | [mm] | 2.980 (± 10) | Kasten:
Außenhöhe 2.860
Längsträger: 120 |
| Eckenradius Seite und Dach zu Vorderwand | [mm] | 50 - 80 | |
| Eckenradius Seite zu Dach | [mm] | 50 - 80 | |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Masse | [kg] | 2.200 | Die Masse wird im Simulationsinstrument als generischer Wert verwendet und muss für die Luftwiderstandsprüfung nicht überprüft werden. |
Tabelle 14 Typ und Fahrgestellkonfiguration für den Standard-Sattelanhänger "ST1"
| Anhängertyp | Sattelanhänger mit 3 Achsen ohne Lenkachse(n) |
| Fahrgestellkonfiguration |
|
Tabelle 15 Spezifikationen des Standard-Sattelanhängers "ST1" 19
| Spezifikation | Einheit | Außenmaß (Toleranz) | Anmerkungen |
| Gesamtlänge | [mm] | 13.685 | |
| Gesamtbreite (Breite der Karosserie) | [mm] | 2.550 (- 10) | |
| Höhe der Karosserie | [mm] | 2.850 (± 10) | Max. komplette Höhe: 4.000 (Richtlinie 96/53/EG) |
| Komplette Höhe, unbeladen | [mm] | 4.000 (- 10) | Höhe über die gesamte Länge Spezifikation für den Sattelanhänger, ist für die Überprüfung der Fahrzeughöhe während der Prüfung mit konstanter Geschwindigkeit nicht maßgeblich |
| Kupplungshöhe des Anhängers, unbeladen | [mm] | 1.150 | Spezifikation für den Sattelanhänger, ist nicht Gegenstand der Untersuchung während der Prüfung mit konstanter Geschwindigkeit |
| Radstand | [mm] | 7.700 | |
| Achsabstand | [mm] | 1.310 | Gruppe mit drei Achsen, 24 t (Richtlinie 96/53/EG) |
| Überhang vorn | [mm] | 1.685 | Radius: 2.040 (gesetzlicher Grenzwert, Richtlinie 96/53/EG) |
| Vorderwand | Flache Wand mit Anschlüssen für Druckluft und Elektrizität | ||
| Ecke Vorder-/Seitenwand | [mm] | Abgerundet durch eine Leiste und Kantenradien ≤ 5 | Sekante eines Kreises mit dem Sattelzapfen als Mittelpunkt und einem Radius von 2.040 (gesetzlicher Grenzwert, Richtlinie 96/53/EG) |
| Restliche Ecken | [mm] | Abgerundet mit Radius ≤ 10 | |
| Abmessung Werkzeugkasten x-Achse des Fahrzeugs | [mm] | 655 | ± 10 % des Zielwerts |
| Abmessung Werkzeugkasten y-Achse des Fahrzeugs | [mm] | 445 | ± 5 % des Zielwerts |
| Abmessung Werkzeugkasten z-Achse des Fahrzeugs | [mm] | 495 | ± 5 % des Zielwerts |
| Länge des seitlichen Unterfahrschutzes | [mm] | 3.045 | 2 Leisten auf jeder Seite, gemäß UNECE-Regelung Nr. 73, Änderung 01 (2010), +/- 100 abhängig vom Radstand |
| Leistenprofil | [mm2] | 100 × 30 | UNECE-Regelung Nr. 73, Änderung 01 (2010) |
| Technische Gewichtskraft des Gesamtfahrzeugs | [kg] | 39.000 | Gesetzlicher Wert: 24.000 (Richtlinie 96/53/EG) |
| Fahrzeugleergewicht | [kg] | 7.500 | Wurde während der Luftwiderstandsprüfung nicht überprüft |
| Zulässige Achslast | [kg] | 24.000 | Gesetzlicher Grenzwert (Richtlinie 96/53/EG) |
| Technische Achslast | [kg] | 27.000 | 3 × 9.000 |
| Luftwiderstandsfamilie | Anlage 5 19 22 |
Eine Luftwiderstandsfamilie ist durch Konstruktions- und Leistungsparameter charakterisiert. Diese gelten für alle Fahrzeuge innerhalb der Familie. Der Hersteller kann entscheiden, welche Fahrzeuge zu einer Luftwiderstandsfamilie gehören, solange die in Nummer 3 für mittelschwere und schwere Lastkraftwagen und in Nummer 6 für schwere Busse aufgeführten Zugehörigkeitskriterien erfüllt sind. Die Luftwiderstandsfamilie muss von der Genehmigungsbehörde genehmigt werden. Der Hersteller muss der Genehmigungsbehörde die betreffenden Luftwiderstandsdaten der einer Luftwiderstandsfamilie zugehörigen Mitglieder bereitstellen.
In einigen Fällen sind Überschneidungen zwischen den Parametern möglich. Diese Situation ist zu berücksichtigen, damit gewährleistet ist, dass nur Fahrzeuge mit den gleichen Eigenschaften ein und derselben Luftwiderstandsfamilie zugeordnet werden. Der Hersteller muss solche Fälle ermitteln und der Genehmigungsbehörde mitteilen. Diese Sachlage ist anschließend als Kriterium für die Erstellung einer neuen Luftwiderstandsfamilie zu berücksichtigen.
Zusätzlich zu den in Nummer 4 dieses Anhangs für mittelschwere und schwere Lastkraftwagen und in Nummer 6.1 dieses Anhangs für schwere Busse aufgeführten Parametern kann der Hersteller weitere Kriterien einführen, mit denen die Festlegung enger gefasster Familien möglich ist.
4. Parameter zur Definition der Luftwiderstandsfamilie für mittelschwere und schwere Lastkraftwagen: 22
4.1. Mittelschwere und schwere Lastkraftwagen dürfen in einer Familie zusammengefasst werden, wenn sie derselben Fahrzeuggruppe gemäß Anhang I Tabelle 1 bzw. 2 angehören und die folgenden Kriterien erfüllt sind:
- Gleiche Fahrerhausbreite und gleiche Geometrie der Rohkarosserie bis zur B-Säule und über den Fersenpunkt ohne Fahrerhaus-Unterbau (z.B. Motortunnel). Alle Fahrzeuge der Familie dürfen maximal um ± 10 mm vom Stammfahrzeug abweichen.
- Gleiche Dachhöhe in der Senkrechten z. Alle Fahrzeuge der Familie dürfen maximal um ± 10 mm vom Stammfahrzeug abweichen.
- Für Fahrzeuge mit Rahmen: Gleiche Fahrerhaushöhe über dem Rahmen. Dieses Kriterium ist erfüllt, wenn die Abweichung der Fahrerhaushöhe über dem Rahmen innerhalb von z < 175 mm liegt.
Die Erfüllung der auf das Familienkonzept bezogenen Anforderungen sind anhand von CAD-(Computer Aided Design-)Daten nachzuweisen.
Abbildung 1 Definition einer Familie
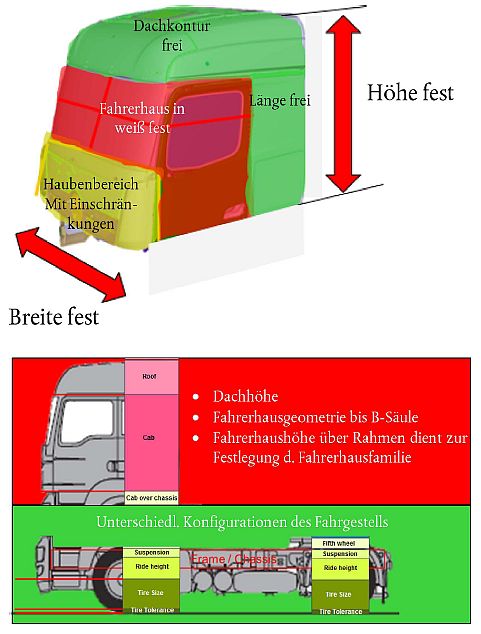
4.2. Eine Luftwiderstandsfamilie besteht aus zu prüfenden Mitgliedern sowie aus Fahrzeugkonfigurationen, die nicht gemäß der vorliegenden Verordnung geprüft werden können.
4.3. Bei den zu prüfenden Mitgliedern einer Familie handelt es sich um Fahrzeugkonfigurationen, die die Anforderungen an den in 3.3 im Hauptteil dieses Anhangs beschriebenen Aufbau des Fahrzeugs erfüllen.
5. Auswahl des Stammfahrzeugs für die Luftwiderstandsfamilie für mittelschwere und schwere Lastkraftwagen 19 22
5.1. Das Stammfahrzeug für jede Familie ist gemäß den folgenden Kriterien auszuwählen:
5.2. Bei mittelschweren Sololastkraftwagen, schweren Sololastkraftwagen und Sattelzugmaschinen muss das Fahrgestell den Abmessungen der Standardkarosserie oder des Standard-Sattelanhängers entsprechen, wie in Anlage 4 dieses Anhangs definiert.
5.3. Alle zu prüfenden Mitglieder der Familie müssen einen Luftwiderstandswert aufweisen, der dem für das Stammfahrzeug angegebenen Wert für Cd · Adeclared entspricht oder kleiner als dieser Wert ist.
5.4. Der Antragsteller für eine Zertifizierung muss anhand wissenschaftlicher Methoden, beispielsweise numerische Strömungsmechanik (CFD: computational fluid dynamics), Windkanalergebnisse oder allgemein anerkannte Regeln der Technik, nachweisen können, dass die Auswahl des Stammfahrzeugs die Bestimmungen in Nummer 5.3 erfüllt. Diese Bestimmung gilt für alle Fahrzeugvarianten, die mithilfe der Prüfung mit konstanter Geschwindigkeit gemäß Nummer 3 dieses Anhangs geprüft werden können. Andere Fahrzeugkonfigurationen (z.B. Fahrzeughöhen, die nicht mit den Bestimmungen in Anlage 4 konform sind, oder Radstände, die nicht den Abmessungen der Standardkarosserie gemäß Anlage 5 entsprechen) erhalten ohne weiteren Nachweis denselben Luftwiderstandswert wie das zu prüfende Stammfahrzeug innerhalb der Familie. Da Reifen als Teil der Messeinrichtungen betrachtet werden, ist ihr Einfluss beim Nachweis des ungünstigsten Szenarios nicht zu berücksichtigen.
5.5. Bei schweren Lastkraftwagen kann der angegebene Wert Cd· Adeclared für die Bildung von Familien in anderen Fahrzeuggruppen verwendet werden, sofern die Familienkriterien gemäß Nummer 5 dieses Anhangs unter Berücksichtigung der in Tabelle 16 genannten Bestimmungen erfüllt sind.
Tabelle 16 Bestimmungen für die Übertragung von Luftwiderstandswerten von schweren Lastkraftwagen auf andere Fahrzeuggruppen 19 22
| Fahrzeuggruppe | Übertragungsregel | Anmerkungen |
| 1, 1 s | Fahrzeuggruppe 2 - 0,2 m2 | Nur zulässig, wenn der Wert für die zugehörige Familie in Gruppe 2 gemessen wurde |
| 2 | Fahrzeuggruppe 3 - 0,2 m2 | Nur zulässig, wenn der Wert für die zugehörige Familie in Gruppe 3 gemessen wurde |
| 3 | Fahrzeuggruppe 4 - 0,2 m2 | |
| 4 | Keine Übertragung zulässig | |
| 5 | Keine Übertragung zulässig | |
| 9 | Fahrzeuggruppe 1,2,3,4 + 0,1 m2 | Die für die Übertragung anwendbare Fahrzeuggruppe muss mit der technisch zulässigen Gesamtmasse im beladenen Zustand (TPMLM: technically permissible maximum laden mass) übereinstimmen.
Bei einem TPMLM von > 16 Tonnen:
Übertragung bereits übertragener Werte zulässig. |
| 10 | Fahrzeuggruppe 1,2,3,5 + 0,1 m2 | |
| 11 | Fahrzeuggruppe 9 | Übertragung bereits übertragener Werte zulässig. |
| 12 | Fahrzeuggruppe 10 | Übertragung bereits übertragener Werte zulässig. |
| 16 | Fahrzeuggruppe 9 + 0,3 m2 | Übertragung bereits übertragener Werte zulässig. |
5.6. Bei mittelschweren Lastkraftwagen kann der angegebene Wert Cd· Adeclared für die Bildung von Familien in anderen Fahrzeuggruppen übertragen werden, sofern die Familienkriterien gemäß Nummer 5 dieses Anhangs sowie die in Tabelle 16a genannten Bestimmungen erfüllt sind. Die Übertragung erfolgt dadurch, dass der Wert Cd· Adeclared unverändert aus der Ursprungsgruppe übernommen wird.
Tabelle 16a: Bestimmungen für die Übertragung von Luftwiderstandswerten von mittelschweren Lastkraftwagen auf andere Fahrzeuggruppen 22
| Fahrzeuggruppe | Übertragung von Fahrzeuggruppe(n) zulässig |
| 51 | 53 |
| 52 | 54 |
| 53 | 51 |
| 54 | 52 |
6. Parameter zur Definition der Luftwiderstandsfamilie für schwere Busse: 22
6.1. Schwere Busse dürfen in einer Familie zusammengefasst werden, wenn sie derselben Fahrzeuggruppe gemäß den Tabellen 4, 5 und 6 in Anhang I angehören und die folgenden Kriterien erfüllt sind:
- Fahrzeugbreite: Alle Fahrzeuge der Familie dürfen maximal um ± 50 mm vom Stammfahrzeug abweichen. Die Fahrzeugbreite wird gemäß den Definitionen in Anhang III bestimmt.
- Höhe der integrierten Karosserie: Alle Fahrzeuge der Familie müssen innerhalb des Gesamtbereichs von 250 mm bleiben. Die Höhe der integrierten Karosserie ist gemäß den Definitionen in Anhang III zu bestimmen.
- Fahrzeuglänge: Alle Fahrzeuge der Familie müssen innerhalb des Gesamtbereichs von 5 m bleiben. Die Länge ist gemäß den Definitionen in Anhang III zu bestimmen.
Die Erfüllung der auf das Familienkonzept bezogenen Anforderungen sind anhand von CAD-Daten oder- Zeichnungen (CAD: computer-aided design - computerunterstütztes Konstruieren) nachzuweisen. Die Art des Nachweises ist vom Hersteller zu wählen.
7. Auswahl des Stammfahrzeugs für die Luftwiderstandsfamilie für schwere Busse 22
Das Stammfahrzeug für jede Familie ist gemäß den folgenden Kriterien auszuwählen:
7.1. Alle Fahrzeuge der Familie müssen einen Luftwiderstandswert aufweisen, der dem Wert Cd· Adeclared für das Stammfahrzeug entspricht oder kleiner als dieser Wert ist.
7.2. Der Antragsteller für eine Zertifizierung muss anhand wissenschaftlicher Methoden, beispielsweise numerische Strömungsmechanik (CFD), Windkanalergebnisse oder allgemein anerkannte Regeln der Technik, nachweisen können, dass das Fahrzeug die Bestimmungen in Nummer 7.1 erfüllt. Dieser Nachweis muss den Einfluss von auf dem Dach montierten Systemen abdecken. Da Reifen als Teil der Messausrüstung angesehen werden, braucht ihr Einfluss beim Nachweis des Worst-Case-Szenarios nicht berücksichtigt zu werden.
7.3. Der angegebene Wert Cd· Adeclared kann für die Bildung von Familien in anderen Untergruppen verwendet werden, wenn die Familienkriterien gemäß Nummer 1 dieser Anlage auf der Grundlage der Übertragungsfunktionen bzw. -bestimmungen in Tabelle 16b erfüllt sind. Mehrere Kombinationen von Kopier- und Übertragungsfunktionen sind zulässig.
Für Fahrzeuge von Untergruppen, für die in der zweiten Spalte von Tabelle 16b "nein" angegeben ist, werden vom Simulationsinstrument automatisch generische Werte für den Luftwiderstand zugewiesen.
Tabelle 16b: Bestimmungen für die Übertragung von Luftwiderstandswerten zwischen Fahrzeuggruppen 22
| Fahrzeugparameter-Untergruppe | Luftwiderstandsmessung zulässig | Übertragung aus Fahrzeuggruppe(n) zulässig und Übertragungsformel für Cd· Adeclared | Übertragung aus Fahrzeuggruppe(n) durch unveränderte Übernahme von Cd· Adeclared aus Ursprungsgruppe zulässig |
| 31a | nein | entfällt | entfällt |
| 31b1 | nein | entfällt | entfällt |
| 31b2 | nur zwischenstädtischer Zyklus | entfällt | 32a, 32b, 32c, 32d, 33b2, 34a, 34b, 34c, 34d |
| 31c | nein | entfällt | entfällt |
| 31d | nein | entfällt | entfällt |
| 31e | nein | entfällt | entfällt |
| 32a | ja | entfällt | 31b2, 32b, 32c, 32d, 34a, 34b, 34c, 34d |
| 32b | ja | entfällt | 31b2, 32a, 32c, 32d, 34a, 34b, 34c, 34d |
| 32c | ja | entfällt | 31b2, 32a, 32b, 32d, 34a, 34b, 34c, 34d |
| 32d | ja | entfällt | 31b2, 32a, 32b, 32c, 34a, 34b, 34c, 34d |
| 32e | ja | entfällt | 32f, 34e, 34f |
| 32f | ja | entfällt | 32e, 34e, 34f |
| 33a | nein | entfällt | entfällt |
| 33b1 | nein | entfällt | entfällt |
| 33b2 | nur zwischenstädtischer Verkehr | Fahrzeuggruppe 31b2 + 0,1 m2 | 34a, 34b, 34c, 34d, 35b2, 36a, 36b, 36c, 36d |
| 33c | nein | entfällt | entfällt |
| 33d | nein | entfällt | entfällt |
| 33e | nein | entfällt | entfällt |
| 34a | ja | Fahrzeuggruppe 32a + 0,1 m2 | 33b2, 34b, 34c, 34d, 35b2, 36a, 36b, 36c, 36d |
| 34b | ja | Fahrzeuggruppe 32b + 0,1 m2 | 33b2, 34a, 34c, 34d, 35b2, 36a, 36b, 36c, 36d |
| 34c | ja | Fahrzeuggruppe 32c + 0,1 m2 | 33b2, 34a, 34b, 34d, 35b2, 36a, 36b, 36c, 36d |
| 34d | ja | Fahrzeuggruppe 32d + 0,1 m2 | 33b2, 34a, 34b, 34c, 35b2, 36a, 36b, 36c, 36d |
| 34e | ja | Fahrzeuggruppe 32e + 0,1 m2 | 34f, 36e, 36f |
| 34f | ja | Fahrzeuggruppe 32f + 0,1 m2 | 34e, 36e, 36f |
| 35a | nein | entfällt | entfällt |
| 35b1 | nein | entfällt | entfällt |
| 35b2 | nur zwischenstädtischer Verkehr | Fahrzeuggruppe 33b2 + 0,1 m2 | 36a, 36b, 36c, 36d, 37b2, 38a, 38b, 38c, 38d |
| 35c | nein | entfällt | entfällt |
| 36a | ja | Fahrzeuggruppe 34a + 0,1 m2 | 35b2, 36b, 36c, 36d, 37b2, 38a, 38b, 38c, 38d |
| 36b | ja | Fahrzeuggruppe 34b + 0,1 m2 | 35b2, 36a, 36c, 36d, 37b2, 38a, 38b, 38c, 38d |
| 36c | ja | Fahrzeuggruppe 34c + 0,1 m2 | 35b2, 36a, 36b, 36d, 37b2, 38a, 38b, 38c, 38d |
| 36d | ja | Fahrzeuggruppe 34d + 0,1 m2 | 35b2, 36a, 36b, 36c, 37b2, 38a, 38b, 38c, 38d |
| 36e | ja | Fahrzeuggruppe 34e + 0,1 m2 | 36f, 38e, 38f |
| 36f | ja | Fahrzeuggruppe 34f + 0,1 m2 | 36e, 38e, 38f |
| 37a | nein | entfällt | entfällt |
| 37b1 | nein | entfällt | entfällt - |
| 37b2 | nur zwischenstädtischer Verkehr | Fahrzeuggruppe 33b2 + 0,1 m2 | 38a, 38b, 38c, 38d, 39b2, 40a, 40b, 40c, 40d |
| 37c | nein | entfällt | entfällt |
| 37d | nein | entfällt | entfällt |
| 37e | nein | entfällt | entfällt |
| 38a | ja | Fahrzeuggruppe 34a + 0,1 m2 | 37b2, 38b, 38c, 38d, 39b2, 40a, 40b, 40c, 40d |
| 38b | ja | Fahrzeuggruppe 34b + 0,1 m2 | 37b2, 38a, 38c, 38d, 39b2, 40a, 40b, 40c, 40d |
| 38c | ja | Fahrzeuggruppe 34c + 0,1 m2 | 37b2, 38a, 38b, 38d, 39b2, 40a, 40b, 40c, 40d |
| 38d | ja | Fahrzeuggruppe 34d + 0,1 m2 | 37b2, 38a, 38b, 38c, 39b2, 40a, 40b, 40c, 40d |
| 38e | ja | Fahrzeuggruppe 34e + 0,1 m2 | 38f, 40e, 40f |
| 38f | ja | Fahrzeuggruppe 34f + 0,1 m2 | 38e, 40e, 40f |
| 39a | nein | entfällt | entfällt |
| 39b1 | nein | entfällt | entfällt |
| 39b2 | nur zwischenstädtischer Verkehr | Fahrzeuggruppe 35b2 + 0,1 m2 | 40a, 40b, 40c, 40d |
| 39c | nein | entfällt | entfällt |
| 40a | ja | Fahrzeuggruppe 36a + 0,1 m2 | 39b2, 40b, 40c, 40d |
| 40b | ja | Fahrzeuggruppe 36b + 0,1 m2 | 39b2, 40a, 40c, 40d |
| 40c | ja | Fahrzeuggruppe 36c + 0,1 m2 | 39b2, 40a, 40b, 40d |
| 40d | ja | Fahrzeuggruppe 36d + 0,1 m2 | 39b2, 40a, 40b, 40c |
| 40e | ja | Fahrzeuggruppe 36e + 0,1 m2 | 40f |
| 40f | ja | Fahrzeuggruppe 36f + 0,1 m2 | 40e |
| Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften | Anlage 6 19 |
1. Die Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist durch Prüfungen mit konstanter Geschwindigkeit gemäß Abschnitt 3 im Hauptteil dieses Anhangs zu überprüfen. Damit eine Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gegeben ist, gelten die folgenden zusätzlichen Bestimmungen:
- Die Umgebungstemperatur bei der Prüfung mit konstanter Geschwindigkeit darf maximal ± 5 °C von dem für die Zertifizierungsmessung verwendeten Wert abweichen. Dieses Kriterium wird anhand der durchschnittlichen Temperatur aus den ersten Prüfungen mit niedriger Geschwindigkeit überprüft, die vom Instrument für die Vorverarbeitung der Luftwiderstandsdaten berechnet wurde.
- Die Prüfung mit hoher Geschwindigkeit ist mit einer Fahrzeuggeschwindigkeit durchzuführen, die maximal ± 2 km/h von dem für die Zertifizierungsmessung verwendeten Wert abweicht.
Alle Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften sind von der Genehmigungsbehörde zu beaufsichtigen.
2. Ein Fahrzeug besteht die Prüfung zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften nicht, wenn der gemessene Wert für Cd Acr (0) höher ist als der für das Stammfahrzeug angegebene Wert für Cd · Adeclared,zuzüglich einer Toleranzspanne von 7,5 %. Ist die erste Prüfung nicht erfolgreich, dürfen für dasselbe Fahrzeug bis zu zwei weitere Prüfungen an verschiedenen Tagen durchgeführt werden. Wenn der in allen Prüfungen gemessene Wert für Cd Acr (0) höher ist als der für das Stammfahrzeug angegebene Wert für Cd· Adeclared, zuzüglich einer Toleranzspanne von 7,5 %, findet Artikel 23 der vorliegenden Verordnung Anwendung.
Für die Berechnung des Werts für Cd Acr} (0) ist die Version des Instruments zur Vorverarbeitung der Luftwiderstandsdaten des Stammluftwiderstands gemäß Anlage 1 der Anlage 2 dieses Anhangs zu verwenden.
3. Die Anzahl der Fahrzeuge, die für jedes Produktionsjahr auf Übereinstimmung mit den für die zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften zu prüfen sind, ist auf Grundlage von Tabelle 17 zu bestimmen. Die Tabelle ist gesondert auf mittelschwere Lastkraftwagen, schwere Lastkraftwagen und schwere Busse anzuwenden.
Tabelle 17 Anzahl der Fahrzeuge, die für jedes Produktionsjahr auf Übereinstimmung mit den zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften zu prüfen sind: 22
(gesondert anzuwenden auf mittelschwere Lastkraftwagen, schwere Lastkraftwagen und schwere Busse)
| Anzahl zu prüfender Fahrzeuge für Übereinstimmung der Produktion | Zeitplan | Anzahl im Vorjahr produzierter Fahrzeuge, für Übereinstimmung der Produktion relevant |
| 0 | - | ≤ 25 |
| 1 | alle drei Jahre * | 25 < X ≤ 500 |
| 1 | alle zwei Jahre | 500 < X ≤ 5.000 |
| 1 | jedes Jahr | 5.000 < X ≤ 15.000 |
| 2 | jedes Jahr | ≤ 25.000 |
| 3 | jedes Jahr | ≤ 50.000 |
| 4 | jedes Jahr | ≤ 75.000 |
| 5 | jedes Jahr | ≤ 100.000 |
| 6 | jedes Jahr | 100.001 und mehr |
| *) Die Prüfung auf Übereinstimmung der Produktion ist innerhalb der ersten zwei Jahre durchzuführen. | ||
Zur Ermittlung der Produktionszahlen sind nur diejenigen Luftwiderstandsdaten zu berücksichtigen, für die die Anforderungen der vorliegenden Verordnung gelten und denen keine Luftwiderstands-Standardwerte gemäß Anlage 7 dieses Anhangs zugewiesen wurden.
4. Zur Auswahl der Fahrzeuge für die Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gelten die folgenden Bestimmungen:
4.1. Nur Fahrzeuge aus der Fertigungsstraße sind zu prüfen.
4.2. Nur Fahrzeuge, die die Bestimmungen für Prüfungen mit konstanter Geschwindigkeit gemäß Abschnitt 3.3 im Hauptteil dieses Anhangs erfüllen, sind auszuwählen.
4.3. Reifen werden als Teil der Messeinrichtungen betrachtet und können vom Hersteller ausgewählt werden.
4.4. Fahrzeuge in Familien, für die der Luftwiderstandswert durch Übertragung des Werts von anderen Fahrzeugen gemäß Anlage 5 Nummer 5 bestimmt wurde, unterliegen nicht den Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften.
4.5. Fahrzeuge, die Standardwerte für den Luftwiderstand gemäß Anlage 8 verwenden, unterliegen nicht den Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften.
4.6. Ein erstes Fahrzeug, das auf Übereinstimmung mit den zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften geprüft werden soll, ist aus dem Luftwiderstandstyp oder der Luftwiderstandsfamilie auszuwählen, der/die in dem entsprechenden Jahr die höchsten Produktionszahlen aufweist. Alle zusätzlichen Fahrzeuge sind aus allen Luftwiderstandsfamilien auszuwählen und zwischen dem Hersteller und der Genehmigungsbehörde auf der Grundlage der bereits geprüften Luftwiderstandsfamilien und Fahrzeuggruppen zu vereinbaren. Muss nur eine Prüfung pro Jahr oder weniger durchgeführt werden, so ist das Fahrzeug stets aus allen Luftwiderstandsfamilien auszuwählen und zwischen dem Hersteller und der Genehmigungsbehörde zu vereinbaren.
5. Nach Auswahl eines Fahrzeugs für die Prüfung der Übereinstimmung mit den für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften muss der Hersteller die Übereinstimmung dieser Eigenschaften innerhalb von 12 Monaten überprüfen. Der Hersteller kann bei der Genehmigungsbehörde eine Verlängerung dieses Zeitraums um bis zu 6 Monate beantragen, wenn er nachweisen kann, dass die Überprüfung innerhalb des geforderten Zeitraums aufgrund der Wetterverhältnisse nicht möglich war.
| Standardwerte | Anlage 7 19 22 |
Dieser Anhang enthält die Standardwerte für den angegebenen Luftwiderstandswert Cd· Adeclared. Wenn Standardwerte angewandt werden, müssen keine Luftwiderstandsdaten für die Eingabe in das Simulationsinstrument bereitgestellt werden. In diesem Fall werden die Standardwerte vom Simulationsinstrument automatisch zugewiesen.
1. Die Standardwerte für schwere Lastkraftwagen werden gemäß Tabelle 18 festgelegt.
Tabelle 18 Standardwerte für Cd· Adeclared für schwere Lastkraftwagen
| Fahrzeuggruppe | Standardwert Cd· Adeclared [m2] |
| 1, 1 s | 7,1 |
| 2 | 7,2 |
| 3 | 7,4 |
| 4 | 8,4 |
| 5 | 8,7 |
| 9 | 8,5 |
| 10 | 8,8 |
| 11 | 8,5 |
| 12 | 8,8 |
| 16 | 9,0 |
2. -
3. -
4. Die Standardwerte für schwere Busse werden gemäß Tabelle 21 festgelegt. Für Fahrzeuggruppen, für die keine Messung des Luftwiderstands zulässig ist (gemäß Anlage 5 Nummer 7.3 dieses Anhangs), sind die Standardwerte nicht relevant.
Tabelle 21: Standardwerte für Cd· Adeclared für schwere Busse
| Fahrzeugparameter-Untergruppe | Standardwert Cd· Adeclared [m2] |
| 31a | entfällt |
| 31b1 | entfällt |
| 31b2 | 4,9 |
| 31c | entfällt |
| 31d | entfällt |
| 31e | entfällt |
| 32a | 4,6 |
| 32b | 4,6 |
| 32c | 4,6 |
| 32d | 4,6 |
| 32e | 5,2 |
| 32f | 5,2 |
| 33a | entfällt |
| 33b1 | entfällt |
| 33b2 | 5,0 |
| 33c | entfällt |
| 33d | entfällt |
| 33e | entfällt |
| 34a | 4,7 |
| 34b | 4,7 |
| 34c | 4,7 |
| 34d | 4,7 |
| 34e | 5,3 |
| 34f | 5,3 |
| 35a | entfällt |
| 35b1 | entfällt |
| 35b2 | 5,1 |
| 35c | entfällt |
| 36a | 4,8 |
| 36b | 4,8 |
| 36c | 4,8 |
| 36d | 4,8 |
| 36e | 5,4 |
| 36f | 5,4 |
| 37a | entfällt |
| 37b1 | entfällt |
| 37b2 | 5,1 |
| 37c | entfällt |
| 37d | entfällt |
| 37e | entfällt |
| 38a | 4,8 |
| 38b | 4,8 |
| 38c | 4,8 |
| 38d | 4,8 |
| 38e | 5,4 |
| 38f | 5,4 |
| 39a | entfällt |
| 39b1 | entfällt |
| 39b2 | 5,2 |
| 39c | entfällt |
| 40a | 4,9 |
| 40b | 4,9 |
| 40c | 4,9 |
| 40d | 4,9 |
| 40e | 5,5 |
| 40f | 5,5 |
5. Die Standardwerte für mittelschwere Lastkraftwagen werden gemäß Tabelle 22 festgelegt.
Tabelle 22: Standardwerte für Cd· Adeclared für mittelschwere Lastkraftwagen
| Fahrzeuggruppe | Standardwert Cd· Adeclared [m2] |
| 53 | 5,8 |
| 54 | 2,5"; |
| Kennzeichnungen | Anlage 8 19 22 |
Wenn ein Fahrzeug gemäß diesem Anhang zertifiziert wird, muss das Fahrerhaus bzw. der Aufbau folgende Angaben aufweisen:
1.1. Herstellername oder Handelsmarke
1.2. Fabrikmarke und Typenbezeichnung gemäß Angaben in Anlage 2 Absätze 0.2 und 0.3 dieses Anhangs
1.3. Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben "e" umgibt, gefolgt von der Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
1 für Deutschland2 für Frankreich
3 für Italien
4 für die Niederlande
5 für Schweden
6 für Belgien
7 für Ungarn
8 für die Tschechische Republik
9 für Spanien
11 für das Vereinigte Königreich
12 für Österreich
13 für Luxemburg
17 für Finnland
18 für Dänemark
19 für Rumänien
20 für Polen
21 für Portugal
23 für Griechenland
24 für Irland
25 für Kroatien
26 für Slowenien
27 für die Slowakei
29 für Estland
32 für Lettland
34 für Bulgarien
36 für Litauen
49 für Zypern
50 für Malta
1.4. Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die "Grundzertifizierungsnummer" gemäß den Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang I der Verordnung (EU) 2020/683 vermerkt sein. Davor stehen die zweistellige laufende Nummer, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet, sowie der Buchstabe "P" zur Angabe, dass die Zertifizierung für einen Luftwiderstand erteilt wurde.
Die laufende Nummer für die vorliegende Verordnung ist "02"."
1.4.1. Beispiel für ein Zertifizierungszeichen samt Abmessungen
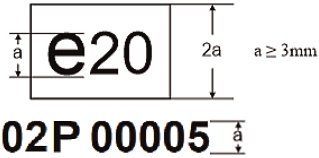
Das obige an einem Fahrerhaus angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (02) geben die laufende Nummer an, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet. Der folgende Buchstabe gibt an, dass die Zertifizierung in Bezug auf Luftwiderstand (P) erteilt wurde. Die letzten fünf Ziffern (00005) wurden von der Genehmigungsbehörde vergeben und stellen die Grundgenehmigungsnummer für den Luftwiderstand dar.
1.5. Das Zertifizierungszeichen ist in einer Weise am Fahrerhaus anzubringen, dass es deutlich lesbar und von dauerhafter Natur ist. Es muss bei eingebautem Fahrerhaus in das Fahrzeug sichtbar sein und an einem für den normalen Fahrerhausbetrieb notwendigen Teil angebracht werden, das während der Lebensdauer des Fahrerhauses in der Regel nicht ausgetauscht werden muss. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer des Fahrerhauses ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden.
2.1. Die Zertifizierungsnummer für den Luftwiderstand setzt sich wie folgt zusammen:
eX*YYYY/YYYY*ZZZZ/ZZZZ*P*00000*00
| Abschnitt 1 | Abschnitt 2 | Abschnitt 3 | Zusätzlicher Buchstabe zu Abschnitt 3 | Abschnitt 4 | Abschnitt 5 |
| Angabe des Landes, das die Zertifizierung ausstellt | Verordnung über CO2-Zertifizierungen für schwere Nutzfahrzeuge "2017/2400" | Letzte Änderung der Verordnung (ZZZZ/ZZZZ) | P = Luftwiderstand | Grundzertifizierungsnummer 00000 | Erweiterung 00"; |
| Eingabeparameter für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen | Anlage 9 19 |
Diese Anlage enthält die Liste der vom Fahrzeughersteller für die Eingabe in das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Die XML-Datei wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten automatisch erzeugt.
(1) "Parameter ID": im Simulationsinstrument verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten
(2) "Type": Datentyp des Parameters
| string............... | Zeichenabfolge in ISO8859-1-Kodierung |
| token............... | Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende |
| date................. | Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DDTHH:MM:SSZ, wobei kursive Zeichen unveränderlich sind, z.B. "2002-05-30T09:30:10Z" |
| integer............. | Wert mit integralem Datentyp ohne führende Nullen, z.B. ,1800" |
|
double, X......... | Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen (".") und ohne führende Nullen, z.B. für "double, 2": "2345.67", für "double, 4": "45.6780" |
(3) "Unit" ...physikalische Einheit des Parameters
Satz Eingabeparameter
Tabelle 1 Eingabeparameter "AirDrag" 22
| Parameterbezeichnung | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Manufacturer | P240 | token | ||
| Model | P241 | token | ||
| CertificationNumber | P242 | token | Kennung des Bauteils gemäß der Verwendung im Zertifizierungsverfahren | |
| Date | P243 | date | Datum und Zeitpunkt der Erstellung des Bauteil-Hashs | |
| AppVersion | P244 | token | Nummer zur Angabe der Version des Instruments zur Vorverarbeitung der Luftwiderstandsdaten | |
| CdxA_0 | P245 | double, 2 | [m2] | Endergebnis des Instruments zur Vorverarbeitung der Luftwiderstandsdaten. |
| TransferredCdxA | P246 | double, 2 | [m2] | CdxA_0 an zugehörige Familien in anderen Fahrzeuggruppen gemäß Anlage 5 Tabelle 16 für schwere Lastkraftwagen, Tabelle 16a für mittelschwere Lastkraftwagen bzw. Tabelle 16b für schwere Busse übertragen. Falls keine Übertragungsregel angewandt wurde, muss CdxA_0 bereitgestellt werden. |
| DeclaredCdxA | P146 | double, 2 | [m2] | Angegebener Wert für die Luftwiderstandsfamilie |
Falls im Simulationsinstrument Standardwerte gemäß Anlage 7 verwendet werden sollen, müssen keine Eingabedaten für die Luftwiderstandskomponente bereitgestellt werden. Die Standardwerte werden automatisch gemäß dem Schema der Fahrzeuggruppen zugewiesen.
| Überprüfung der Daten zu Hilfseinrichtungen von Lastkraftwagen und Bussen | Anhang IX 19 22 |
In diesem Anhang werden die Bestimmungen hinsichtlich der Angabe der Technologien und anderer relevanter Eingabeinformationen für Hilfssysteme für schwere Nutzfahrzeuge zur Ermittlung der fahrzeugspezifischen CO2-Emissionen beschrieben.
Im Simulationsinstrument ist die Leistungsaufnahme der folgenden Hilfseinrichtungstypen unter Verwendung technologiespezifischer durchschnittlicher generischer Modelle für die Leistungsaufnahme zu berücksichtigen:
- Motorkühlventilator
- Lenkanlage
- Elektrisches System
- Pneumatisches System
- Heizungs-, Lüftungs- und Klimaanlage (HLK-Anlage)
- Nebenabtrieb (PTO)
Die generischen Werte sind in das Simulationsinstrument integriert und werden auf der Grundlage der entsprechenden Eingabeinformationen gemäß den Bestimmungen dieses Anhangs automatisch verwendet. Die entsprechenden Datenformate für die Eingabe in das Simulationsinstrument sind in Anhang III beschrieben: Der Übersichtlichkeit halber sind die in Anhang III verwendeten dreistelligen Parameter-ID auch in diesem Anhang aufgeführt.
Für die Zwecke dieses Anhangs gelten folgende Begriffsbestimmungen. In Klammern ist jeweils der betreffende Hilfseinrichtungstyp angegeben.
(1) "An der Kurbelwelle angebrachter Ventilator" bezeichnet einen in Fortsetzung der Kurbelwelle angebrachten und von ihr, oft über einen Flansch, angetriebenen Ventilator (Motorkühlventilator).(2) "Ventilator mit Riemenantrieb oder Getriebe" bezeichnet einen Ventilator, der so angebracht ist, dass ein zusätzlicher Riemen, ein Spannsystem oder ein Getriebe erforderlich ist (Motorkühlventilator).
(3) "Hydraulisch angetriebener" Ventilator bezeichnet einen durch Hydraulik angetriebenen Ventilator, der oft entfernt vom Motor angebracht ist. Das Hydrauliksystem mit Ölkreislauf, Pumpe und Ventilen beeinflusst die Verluste im System und seine Effizienz (Motorkühlventilator).
(4) "Ventilator mit Elektroantrieb" bezeichnet einen vom einem Elektromotor angetriebenen Ventilator. Es wird die Effizienz der vollständigen Energieumwandlung, einschließlich der in die Batterie eingespeisten und von der Batterie abgegebenen Energie, berücksichtigt (Motorkühlventilator).
(5) "Elektronisch gesteuerte Viscokupplung" bezeichnet eine Kupplung, in der der Flüssigkeitsstrom in der Viscokupplung mithilfe einer Reihe von Sensoreingaben zusammen mit SW-Logik elektronisch ausgelöst wird (Motorkühlventilator).
(6) "Bimetallgesteuerte Viscokupplung" bezeichnet eine Kupplung, in der eine Temperaturänderung mithilfe einer Bimetallverbindung in mechanische Bewegung umgesetzt wird. Durch die mechanische Bewegung wird anschließend die Viscokupplung betätigt (Motorkühlventilator).
(7) "Kupplung mit diskreten Stufen" bezeichnet eine mechanische Einrichtung, die eine graduelle Betätigung nur in einzelnen Stufen (nicht kontinuierlich) zulässt (Motorkühlventilator).
(8) "Ein-Aus-Kupplung" bezeichnet eine mechanische Kupplung, die entweder vollständig betätigt oder vollständig unbetätigt ist (Motorkühlventilator).
(9) "Pumpe mit variabler Verdrängung" bezeichnet eine Einrichtung, die mechanische Energie in hydraulische Fließenergie verwandelt. Die pro Umdrehung gepumpte Flüssigkeitsmenge kann während des Betriebs der Pumpe verändert werden (Motorkühlventilator).
(10) "Pumpe mit konstanter Verdrängung" bezeichnet eine Einrichtung, die mechanische Energie in hydraulische Fließenergie verwandelt. Die pro Umdrehung gepumpte Flüssigkeitsmenge kann während des Betriebs der Pumpe nicht verändert werden (Motorkühlventilator).
(11) "Steuerung mittels Elektromotor" bezeichnet die Verwendung eines Elektromotors zum Antrieb eines Ventilators. Der Elektromotor wandelt elektrische in mechanische Energie um. Leistung und Drehzahl werden durch die konventionelle Technik für Elektromotoren gesteuert (Motorkühlventilator).
(12) "Pumpe mit fester Verdrängung (Standardtechnik)" bezeichnet eine Pumpe mit interner Durchsatzbegrenzung (Lenkanlage).
(13) "Elektronisch gesteuerte Pumpe mit fester Verdrängung" bezeichnet eine Pumpe mit elektronisch gesteuertem Durchsatz (Lenkanlage).
(14) "Duale Verdrängungspumpe" bezeichnet eine Pumpe mit zwei Kammern (mit derselben oder unterschiedlicher Verdrängung) und interner Durchsatzbegrenzung (Lenkanlage).
(14a) "Elektronisch gesteuerte duale Verdrängungspumpe" bezeichnet eine Pumpe mit zwei Kammern (mit derselben oder unterschiedlicher Verdrängung), die kombiniert oder unter besonderen Bedingungen einzeln genutzt werden können. Der Durchsatz wird mithilfe eines Ventils elektronisch gesteuert (Lenkanlage).
(15) "Mechanisch gesteuerte Pumpe mit variabler Verdrängung" bezeichnet eine Pumpe, deren Verdrängung intern mechanisch gesteuert wird (interne Druckskalen) (Lenkanlage).
(16) "Elektrisch gesteuerte Pumpe mit variabler Verdrängung" bezeichnet eine Pumpe, deren Verdrängung elektronisch gesteuert wird (Lenkanlage).
(17) "Elektrisch angetriebene Pumpe" bezeichnet eine Lenkanlage, die von einem Elektromotor mit ständig zirkulierender Hydraulikflüssigkeit angetrieben wird (Lenkanlage).
(17a) "Vollelektrisches Lenkgetriebe" bezeichnet eine Lenkanlage, die von einem Elektromotor ohne ständig zirkulierender Hydraulikflüssigkeit angetrieben wird (Lenkanlage).
(18) -
(19) "Kompressor mit Energiesparsystem" (ESS: energy saving system) bezeichnet einen Kompressor, der die Leistungsaufnahme beim Abblasen reduziert, indem beispielsweise die Ansaugseite geschlossen wird; das Energiesparsystem wird durch Luftdruck gesteuert (pneumatisches System).
(20) "Kompressorkupplung (Visco)" bezeichnet einen abkoppelbaren Kompressor, dessen Kupplung durch den Systemluftdruck (keine intelligente Strategie) gesteuert wird; die Viscokupplung verursacht im abgekoppelten Zustand geringfügige Verluste (pneumatisches System).
(21) "Kompressorkupplung (mechanisch)" bezeichnet einen abkoppelbaren Kompressor, dessen Kupplung durch den Systemluftdruck (keine intelligente Strategie) gesteuert wird (pneumatisches System).
(22) "Belüftungssystem " ("AMS": air management system) bezeichnet eine elektronische Luftaufbereitungseinheit, in der ein elektronisch gesteuerter Lufttrockner zur Optimierung der Luftregenerierung mit einer unter Freilaufbedingungen bevorzugten Förderleistung kombiniert ist (erfordert eine Kupplung oder ein Energiesparsystem) (pneumatisches System).
(23) "Leuchtdiode" ("LED": light emitting diode) bezeichnet Halbleitereinrichtungen, die sichtbares Licht aussenden, wenn sie von einem elektrischen Strom durchflossen werden (elektrisches System).
(24) -
(25) "Nebenabtrieb" ("PTO": power take-off) bezeichnet eine Einrichtung an einem Getriebe oder einem Motor, an die eine optionale strombetriebene Einrichtung ("Verbraucher"), z.B. eine Hydraulikpumpe, angeschlossen sein kann. Ein Nebenabtrieb ist normalerweise optional (Nebenabtrieb).
(26) "Nebenabtriebs-Antriebsmechanismus" bezeichnet eine Einrichtung in einem Getriebe, das den Einbau eines Nebenabtriebs (PTO) ermöglicht.
(26a) "Eingreifendes Zahnrad" bezeichnet ein Zahnrad, das in den Antrieb von Wellen des Motors oder des Getriebes eingreift wenn die PTO-Kupplung (sofern vorhanden) geöffnet ist (PTO).
(27) "Zahnkupplung" bezeichnet eine Kupplung, bei der das Drehmoment vor allem durch Normalkräfte zwischen ineinander gefügten Zähnen übertragen wird. Eine Zahnkupplung kann entweder ein- oder ausgekuppelt sein. Sie wird nur unbelastet betätigt (z.B. beim Gangwechsel in einem manuellen Getriebe) (Nebenabtrieb).
(28) "Synchronring" bezeichnet eine Art der Zahnkupplung, bei der die Drehzahl der zu verbindenden drehenden Teile mittels einer Reibungsvorrichtung angeglichen wird (PTO).
(29) "Mehrscheibenkupplung" bezeichnet eine Kupplung, in der mehrere Reibbeläge parallel angeordnet sind, wobei auf alle Reibungspaare dieselbe Anpresskraft wirkt. Mehrscheibenkupplungen sind kompakt und können unter Last ein- und ausgekuppelt werden. Sie können als Trocken- oder als Feuchtkupplungen konzipiert sein (Nebenabtrieb).
(30) "Schaltrad" bezeichnet ein als Schaltungselement verwendetes Gangrad, das für den Schaltvorgang auf seiner Welle in den Zahneingriff des betreffenden Ganges hinein- oder aus ihm herausgeschoben wird (PTO).
(31) "Kupplung mit diskreten Stufen (aus + zwei Stufen)" bezeichnet eine mechanische Einrichtung, die eine graduelle Betätigung nur in zwei einzelnen Stufen sowie ausgeschaltet (nicht kontinuierlich) zulässt (Motorkühlventilator).
(32) "Kupplung mit diskreten Stufen (aus + drei Stufen)" bezeichnet eine mechanische Einrichtung, die eine graduelle Betätigung nur in drei einzelnen Stufen sowie ausgeschaltet (nicht kontinuierlich) zulässt (Motorkühlventilator).
(33) "Kompressor-Motor-Verhältnis" bezeichnet bei Vorwärtsgängen das Verhältnis der Motordrehzahl zur Drehzahl des Luftkompressors ohne Schlupf (i = nin/nout) (pneumatisches System).
(34) "Mechanische Luftfederungssteuerung" bezeichnet ein Luftfederungssystem, bei dem die Luftfederungssteuerventile mechanisch ohne Elektronik und Software betätigt werden (pneumatisches System).
(35) "Elektronische Luftfederungssteuerung" bezeichnet ein Luftfederungssystem, bei dem mehrere Sensoreingänge zusammen mit Softwarelogik zur elektronischen Betätigung der Luftfederungssteuerventile verwendet werden (pneumatisches System).
(36) "Pneumatische SCR-Reagensdosierung" bezeichnet die Verwendung von Druckluft zur Dosierung von Reagenzien in die Auspuffanlage (pneumatisches System).
(37) "Pneumatische Türantriebstechnik" bezeichnet den Betrieb der Fahrgasttüren des Fahrzeugs mit Druckluft (pneumatisches System).
(38) "Elektrische Türantriebstechnik" bezeichnet den Betrieb der Fahrgasttüren des Fahrzeugs mit einem Elektromotor oder mit einem elektrohydraulischen System (pneumatisches System).
(39) "Gemischte Türantriebstechnik" bezeichnet die Ausstattung des Fahrzeugs mit sowohl "pneumatischer Türantriebstechnik" als auch "elektrischer Türantriebstechnik" (pneumatisches System).
(40) "Intelligentes Regenerationssystem" bezeichnet ein pneumatisches System, bei dem der Bedarf an Regenerationsluft im Hinblick auf die erzeugte Trockenluftmenge optimiert wird (pneumatisches System).
(41) "Intelligentes Kompressionssystem" bezeichnet ein pneumatisches System, bei dem die Luftzufuhr elektronisch gesteuert wird, mit einer unter Freilaufbedingungen bevorzugten Förderleistung (pneumatisches System).
(42) "Innenleuchten" bezeichnet die Leuchten im Fahrgastraum, die gemäß den Anforderungen in Anhang 3 Absatz 7.8 der UN-Regelung Nr. 107 1 (künstliche Innenbeleuchtung) eingebaut wurden (elektrisches System).
(43) "Tagfahrleuchten" bezeichnet Tagfahrleuchten gemäß Absatz 2.7.25 der UN-Regelung Nr. 48 2 (elektrisches System).
(44) "Positionsleuchten" bezeichnet "Seitenmarkierungsleuchten" gemäß Absatz 2.7.24 der UN-Regelung Nr. 48 (elektrisches System).
(45) "Bremsleuchten" bezeichnet Bremsleuchten gemäß Absatz 2.7.12 der UN-Regelung Nr. 48 (elektrisches System).
(46) "Scheinwerfer" bezeichnet "Scheinwerfer für Abblendlicht" gemäß Absatz 2.7.10 der UN-Regelung Nr. 48 und "Scheinwerfer für Fernlicht" nach Absatz 2.7.9 der UN-Regelung Nr. 48 (elektrisches System).
(47) "Generator" bezeichnet eine elektrische Maschine zum Laden der Batterie und zur Stromversorgung des elektrischen Hilfssystems, wenn der Verbrennungsmotor des Fahrzeugs läuft. Ein Generator kann nicht zum Antrieb des Fahrzeugs beitragen (elektrisches System).
(48) "Intelligentes Generatorsystem" bezeichnet ein System aus einem oder mehreren Generatoren in Kombination mit einem oder mehreren speziellen REESS, das elektronisch gesteuert wird, mit einer unter Freilaufbedingungen bevorzugten Erzeugung von elektrischer Energie (elektrisches System).
(49) "Heizungs-, Lüftungs- und Klimaanlage" (HLK-Anlage) bezeichnet eine Anlage, die aktiv heizen und/oder aktiv kühlen und Luft austauschen oder ersetzen kann, um für eine bessere Luftqualität im Fahrgast- und/oder Fahrerraum zu sorgen (HLK-Anlage).
(50) "HLK-Anlagekonfiguration" bezeichnet eine Kombination von HLK-Anlagebauteilen gemäß Tabelle 13 dieses Anhangs (HLK-Anlage).
(51) "Thermisches Komfortsystem für den Fahrgastraum" bezeichnet ein System, das mithilfe von Gebläsen die Luft im Fahrzeug umwälzt oder Frischluft in das Fahrzeug bläst, wobei der Luftvolumenstrom zumindest aktiv gekühlt oder geheizt werden kann. Die Luft wird über das Dach des Fahrzeugs und bei Doppeldeckfahrzeug über beide Etagen verteilt. Bei offenen Doppeldeckfahrzeugen erfolgt die Luftverteilung über die untere Etage (HLK-Anlage).
(52) "Anzahl der Wärmepumpen für den Fahrgastraum" bezeichnet die Anzahl der Wärmepumpen, die im Fahrzeug eingebaut sind, um die Innenraumluft oder die dem Fahrgastraum zugeführte Frischluft zu erwärmen und/oder zu kühlen. Wird eine Wärmepumpe für den Fahrgastraum und den Fahrerraum verwendet, wird nur die für den Fahrgastraum gezählt (HLK-Anlage). Werden verschiedene Wärmepumpen zum Heizen und Kühlen installiert, wird die Anzahl der Wärmepumpen durch die niedrigere Zahl der beiden getrennten Fälle definiert, d. h. die Anzahl der Wärmepumpen zum Kühlen und die Anzahl der Wärmepumpen zum Heizen werden getrennt betrachtet (so wird beispielsweise bei zwei Wärmepumpen zum Kühlen und einer Wärmepumpe zum Heizen nur eine Wärmepumpe berücksichtigt).
(53) "Klimaanlage für den Fahrerraum" bezeichnet die Ausstattung eines Fahrzeugs mit einer Anlage, die die Innenraumluft oder die dem Fahrerraum zugeführte Frischluft abkühlen kann (HLK-Anlage).
(54) "Klimaanlage für den Fahrgastraum" bezeichnet die Ausstattung eines Fahrzeugs mit einer Anlage, die die Innenraumluft oder die dem Fahrgastraum zugeführte Frischluft abkühlen kann (HLK-Anlage).
(55) "Unabhängige Wärmepumpe für den Fahrerraum" bezeichnet die Ausstattung eines Fahrzeugs mit einer Wärmepumpe, die nur für den Fahrerraum verwendet wird (HLK-Anlage).
(56) "Zweistufige Wärmepumpe" bezeichnet eine Wärmepumpe, die eine graduelle Betätigung nur in zwei Stufen (nicht kontinuierlich) zulässt (HLK-Anlage).
(57) "Dreistufige Wärmepumpe" bezeichnet eine Wärmepumpe, die eine graduelle Betätigung nur in drei Stufen (nicht kontinuierlich) zulässt (HLK-Anlage).
(58) "Vierstufige Wärmepumpe" bezeichnet eine Wärmepumpe, die eine graduelle Betätigung nur in vier Stufen (nicht kontinuierlich) zulässt (HLK-Anlage).
(59) "Stufenlose Wärmepumpe" bezeichnet eine Wärmepumpe, die eine graduelle Betätigung kontinuierlich zulässt oder bei der der Kompressor der Klimaanlage von einem Elektromotor mit stufenlos regelbarer Drehzahl angetrieben wird (HLK-Anlage).
(60) "Leistung der Zusatzheizung" bezeichnet die Leistung der Zusatzheizung, wie sie auf dem Etikett gemäß Anhang 7 Absatz 4 der UN-Regelung Nr. 122 3 angegeben ist (HLK-Anlage).
(61) "Doppelverglasung" bezeichnet die Fenster des Fahrgastraums, die aus zwei Glasfensterscheiben bestehen, die durch gasgefüllten Raum oder durch Vakuum getrennt sind. Bei verschiedenen Arten von Fenstern im Fahrgastraum muss der flächenmäßig vorherrschende Fenstertyp ausgewählt werden. Bei der Bewertung des vorherrschenden Fenstertyps werden die Windschutzscheibe, die Heckscheibe, das (die) Fenster auf der Fahrerseite, die Fenster in den Türen, die Fenster über und vor der Vorderachse (Beispiele siehe Abbildung 1) sowie kippbare Fenster nicht berücksichtigt (HLK-Anlage).
Abbildung 1:
Fenster, die nicht als vorherrschender Fenstertyp zu betrachten sind 22
(62) "Wärmepumpe" bezeichnet ein System, bei dem ein Kältemittel in einem Kreislaufprozess zur Übertragung von Wärmeenergie aus der Umgebung in den Fahrgast- und/oder Fahrerraum und/oder zur Übertragung von Wärmeenergie in die entgegengesetzte Richtung (Kühl- und/oder Heizfunktion) mit einem Leistungskoeffizienten größer als 1 verwendet wird (HLK-Anlage).
(63) "Wärmepumpe unter Verwendung von R-744" bezeichnet eine Wärmepumpe, bei der das Kältemittel R-744 als Arbeitsmedium verwendet wird (HLK-Anlage).
(64) "Wärmepumpe ohne Verwendung von R-744" bezeichnet eine Wärmepumpe, bei der ein anderes Arbeitsmedium als das Kältemittel R-744 verwendet wird. Für die mögliche graduelle Betätigung (zweistufig, dreistufig, vierstufig, stufenlos) gelten die Begriffsbestimmungen in den Nummern 56 bis 59 (HLK-Anlage).
(65) "Einstellbarer Kühlmittelthermostat" bezeichnet einen Kühlmittelthermostat, dessen Eigenschaften durch mindestens einen zusätzlichen Eingang neben der Kühlmitteltemperatur beeinflusst werden, z.B. durch eine aktive elektrische Beheizung des Thermostats (HLK-Anlage).
(66) "Einstellbare Zusatzheizung" bezeichnet eine brennstoffbetriebene Heizung mit mindestens zwei Heizleistungsstufen außer "Aus", die in Abhängigkeit von der erforderlichen Heizungsleistung im Bus geregelt werden kann (HLK-Anlage).
(67) "Motorabgas-Wärmetauscher" bezeichnet einen Wärmetauscher, der die Wärmeenergie des Motorabgases zur Beheizung des Kühlkreislaufs nutzt (HLK-Anlage).
(68) "Getrennte Luftverteilungskanäle" bezeichnet einen oder mehrere Luftkanäle, die an ein thermisches Komfortsystem angeschlossen sind, um die klimatisierte Luft gleichmäßig im Fahrgastraum zu verteilen. Zu den Luftkanälen können Lautsprecher oder die Wasserversorgung und die elektrische Verkabelung der HLK-Anlage gehören. In diesem Kanal/diesen Kanälen dürfen keine Druckluftbehälter installiert werden. Mit diesem Modellparameter berücksichtigt das Simulationsinstrument geringere Wärmeübertragungsverluste an die Umgebung oder an Bauteile innerhalb des Kanals. Bei den HLK-Anlagekonfigurationen 8, 9 und 10 in den Fahrzeuggruppen 31, 33, 35, 37 und 39 ist dieser Parameter auf "true" zu setzen, da diese Konfigurationen von geringeren Verlusten profitieren, weil gekühlte Luft auch ohne Luftkanal direkt in den Innenraum des Fahrzeugs geblasen wird. Für alle HLK-Anlagekonfigurationen in den Fahrzeuggruppen 32, 34, 36, 38 und 40 ist dieser Parameter auf "true" zu setzen, da dies dem Stand der Technik entspricht (HLK-Anlage).
(69) "Elektrisch angetriebener Kompressor" bezeichnet einen Kompressor, der von einem Elektromotor angetrieben wird (pneumatisches System).
(70) "Elektrisches Wasserheizgerät" bezeichnet eine Einrichtung, die elektrische Energie zum Aufheizen des Kühlmittels des Fahrzeugs verwendet, einen Leistungskoeffizienten von weniger als 1 hat und während des Fahrbetriebs des Fahrzeugs aktiv für die Heizfunktion verwendet wird (HLK-Anlage).
(71) "Elektrisches Luftheizgerät" bezeichnet eine Einrichtung, die elektrische Energie zur Erwärmung der Luft im Fahrgast- und/oder Fahrerraum verwendet und einen Leistungskoeffizienten von weniger als 1 hat (HLK-Anlage).
(72) "Sonstige Heiztechnik" bezeichnet jede vollelektrische Technik zur Beheizung des Fahrgast- und/oder Fahrerraums, die nicht unter die in den Ziffern 62, 70 oder 71 definierten Technologien fällt (HLK-System).
(73) "Konventionelle Blei-Säure-Batterie" bezeichnet eine Bleibatterie, die nicht unter die Begriffsbestimmung in Ziffer 74 oder 75 fällt (elektrisches System).
(74) "Blei-Säure-Batterie mit AGM-Technologie" (AGM: Absorbent Glass Mat - absorbierende Glasmatte) bezeichnet eine Blei-Säure-Batterie, bei der in Elektrolyt getränkte Glasfasermatten als Separatoren zwischen den negativen und positiven Platten verwendet werden (elektrisches System).
(75) "Blei-Säure-Batterie mit Gel-Technologie" bezeichnet eine Blei-Säure-Batterie, dem Elektrolyt ein Siliziumdioxid-Geliermittel beigemischt ist (elektrisches System).
(76) "Lithium-Ionen-Batterie - hohe Leistung" bezeichnet eine Lithium-Ionen-Batterie, bei der das numerische Verhältnis zwischen Nennstrom in [A] und der Nennkapazität in [Ah] gleich oder größer ist als 10 (elektrisches System).
(77) "Lithium-Ionen-Batterie - hohe Energie" bezeichnet eine Lithium-Ionen-Batterie, bei der das numerische Verhältnis zwischen Nennstrom in [A] und der Nennkapazität in [Ah] weniger beträgt als 10 (elektrisches System).
(78) "Kondensator mit Gleichstromwandler" bezeichnet einen Energiespeicher in Form eines (Ultra-)Kondensators in Kombination mit einer Gleichstromeinheit, die das Spannungsniveau anpasst und den Strom zum und vom elektrischen Verbrauchernetz steuert (elektrisches System).
(79) "Gelenkbus"" bezeichnet einen schweren Bus, bei dem es sich um ein unvollständiges Fahrzeug, ein vollständiges Fahrzeug oder ein vervollständigtes Fahrzeug handelt, das aus mindestens zwei starren Teilen besteht, die durch einen Gelenkteil miteinander verbunden sind. Die Teile müssen nur in einer Werkstatt miteinander verbunden bzw. voneinander getrennt werden können. Bei schweren Bussen als vollständiges bzw. vervollständigtes Fahrzeug muss der Gelenkteil die freie Bewegung der Fahrgäste zwischen den starren Teilen ermöglichen.
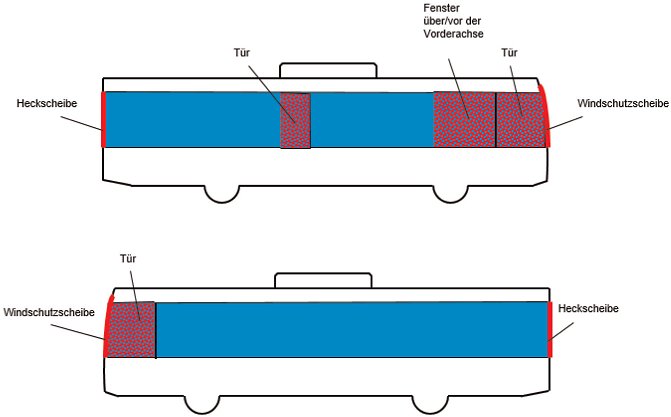
3. Beschreibung zusätzlicher relevanter Eingabeinformationen für das Simulationsinstrument 22
Die Informationen zur Motorkühlventilatortechnologie sind auf der Grundlage der geltenden Kombinationen von Ventilatorantriebs- und Ventilatorsteuerungstechnologie gemäß Tabelle 4 zu machen.
Wenn eine neue Technologie innerhalb einer Ventilatorantriebsgruppe (z.B. an der Kurbelwelle angebracht) nicht in der Liste enthalten ist, so ist die Technologie anzugeben, die "default for fan drive cluster" zugeordnet ist.
Wenn eine neue Technologie nicht in einer Ventilatorantriebsgruppe enthalten ist, so ist die Technologie anzugeben, die "default overall" zugeordnet ist.
Tabelle 4: Motorkühlventilatortechnologien (P181) 22
| Ventilatorantriebsgruppe | Ventilatorsteuerung | Mittelschwere und schwere Lastkraftwagen | Schwere Busse |
| an der Kurbelwelle angebracht | elektronisch gesteuerte Viscokupplung | X | X |
| bimetallgesteuerte Viscokupplung | X (DC) | X | |
| Kupplung mit diskreten Stufen | X | ||
| Kupplung mit diskreten Stufen (aus + 2 Stufen) | X | ||
| Kupplung mit diskreten Stufen (aus + 3 Stufen) | X | ||
| Ein-Aus-Kupplung | X | X (DC, DO) | |
| Antrieb per Riemen oder Getriebe | elektronisch gesteuerte Viscokupplung | X | X |
| bimetallgesteuerte Viscokupplung | X (DC) | X | |
| Kupplung mit diskreten Stufen | X | ||
| Kupplung mit diskreten Stufen (aus + 2 Stufen) | X | ||
| Kupplung mit diskreten Stufen (aus + 3 Stufen) | X | ||
| Ein-Aus-Kupplung | X | X (DC) | |
| hydraulisch angetrieben | Pumpe mit variabler Verdrängung | X | X |
| Pumpe mit konstanter Verdrängung | X (DC, DO) | X (DC) | |
| elektrisch angetrieben | Steuerung mittels Elektromotor | X (DC) | X (DC) |
| X: trifft zu, DC: Standard für Ventilatorantriebsgruppe, DO: Standard insgesamt | |||
Die Lenkanlagentechnologie ist gemäß Tabelle 5 für jede aktive gelenkte Achse des Fahrzeugs anzugeben.
Wenn eine neue Technologie innerhalb einer Lenkanlagentechnologiegruppe(z.B. mechanisch angetrieben) nicht in der Liste enthalten ist, so ist die Technologie anzugeben, die "default for steering technology cluster" zugeordnet ist. Wenn eine neue Technologie nicht in einer Lenkanlagentechnologiegruppe enthalten ist, so ist die Technologie anzugeben, die "default overall" zugeordnet ist.
Tabelle 5: Lenkanlagentechnologien (P182) 22
| Lenkanlagentechnologiegruppe | Technologie | Mittelschwere und schwere Lastkraftwagen | Schwere Busse |
| mechanisch angetrieben | feste Verdrängung | X (DC, DO) | X (DC, DO) |
| feste Verdrängung, elektrische Steuerung | X | X | |
| duale Verdrängungspumpe | X | X | |
| elektronisch gesteuerte duale Verdrängungspumpe | X | X | |
| variable Verdrängung, mechanische Steuerung | X | X | |
| variable Verdrängung, elektrische Steuerung | X | X | |
| elektrisch | elektrisch angetriebene Pumpe | X (DC) | X (DC) |
| Vollelektrisches Lenkgetriebe |
X |
X | |
| X: trifft zu, DC: Standard für Lenkanlagentechnologiegruppe, DO: Standard insgesamt | |||
3.3. Elektrisches System 19 22
3.3.1. Mittelschwere und schwere Lastkraftwagen 22
Die Technologie für das elektrische System ist gemäß Tabelle 6 anzugeben.
Wenn die im Fahrzeug verwendete Technologie nicht aufgeführt ist, muss die "Standardtechnologie" in das Simulationsinstrument eingegeben werden.
Tabelle 6: Elektrische Systemtechnologien für mittelschwere und schwere Lastkraftwagen (P183) 22
|
Technologie | |
| Standardtechnologie | |
|
Standardtechnologie - LED-Scheinwerfer |
Die Technologie für das elektrische System ist gemäß Tabelle 7 anzugeben.
Tabelle 7: Elektrische Systemtechnologien für schwere Busse 22
| Elektrische Systemgruppe | Parameter | Parameter-ID | Eingabe in das Simulationsinstrument | Erläuterungen |
| Generator | "Alternator technology" | P294 | "conventional"/"smart"/"no alternator" | "smart" ist für Systeme anzugeben, die der Begriffsbestimmung in Nummer 2 Ziffer 48 entsprechen; "no alternator" ist für HEV ohne Generator im elektrischen Hilfssystem anzugeben. Für PEV ist keine Eingabe erforderlich. |
| "Smart alternator - maximum rated current" | P295 | Wert in [A] | Maximaler Nennstrom bei Nenndrehzahl gemäß Herstellerkennzeichnung oder Datenblatt oder gemessen nach ISO 8854:2012 Eingabe pro intelligenten Generator | |
| "Smart alternator - rated voltage" | P296 | Wert in [V] | Zulässige Werte: "12", "24", "48" Eingabe pro intelligenten Generator | |
| Batterien für intelligente Generatorsysteme | Technologie | P297 | "lead-acid battery - conventional"/"lead-acid battery - AGM"/"lead-acid battery - gel"/"li-ion battery - high power"/"liion battery - high energy" | Eingabe pro durch ein intelligentes Generatorsystem aufgeladene Batterie Wenn eine Batterietechnologie nicht in der Liste enthalten ist, ist "lead-acid battery - conventional" anzugeben. |
| Nennspannung | P298 | Wert in [V] | Zulässige Werte: "12", "24", "48" Eingabe pro durch ein intelligentes Generatorsystem aufgeladene Batterie Bei Batterien in Reihenschaltung (z.B. zwei 12-V-Einheiten für ein 24-V-System), ist die tatsächliche Nennspannung der einzelnen Batterieeinheiten (in diesem Beispiel 12 V) anzugeben. | |
| Nennkapazität | P299 | Wert in [Ah] | Kapazität in Ah gemäß Herstellerkennzeichnung oder Datenblatt Eingabe pro durch ein intelligentes Generatorsystem aufgeladene Batterie | |
| Kondensatoren für intelligente Kondensatorsysteme | Technologie | P300 | "with DC/DC converter" | Eingabe pro durch ein intelligentes Generatorsystem aufgeladene Batterie |
| Nennkapazität | P301 | Wert in [F] | Kapazität in Farad (F) gemäß Herstellerkennzeichnung oder Datenblatt Eingabe pro durch ein intelligentes Generatorsystem aufgeladenen Kondensator | |
| Nennspannung | P302 | Wert in [V] | Nennbetriebsspannung gemäß Herstellerkennzeichnung oder Datenblatt Eingabe pro durch ein intelligentes Generatorsystem aufgeladenen Kondensator | |
| Elektrische Hilfsenergieversorgung | "Supply of electric auxiliaries from HEV REESS possible" | P303 | "true"/"false" | Auf "true" zu setzen, wenn das Fahrzeug mit einer gesteuerten Leistungsverbindung ausgestattet ist, die die Übertragung von elektrischer Energie von einem HEV-Antriebsenergiespeichersystem zum elektrischen Verbrauchernetz ermöglicht. Eingabe nur für HEV erforderlich. |
| Innenleuchten | "Interior lights LED" | P304 | "true"/"false" | Die Parameter sind nur dann auf "true" zu setzen, wenn alle Leuchten der Kategorie den Begriffsbestimmungen in Nummer 2 Ziffern 42 bis 46 entsprechen. |
| Außenleuchten | "Day running lights LED" | P305 | "true"/"false" | |
| LED-Positionsleuchten | P306 | "true"/"false" | ||
| LED-Bremsleuchten | P307 | "true"/"false" | ||
| LED-Scheinwerfer | P308 | "true"/"false" |
3.4.1. Pneumatische Systeme, die mit Überdruck arbeiten 22
3.4.1.1. Menge der Luftzufuhr
Für pneumatische Systeme, die mit Überdruck arbeiten, ist die Menge der Luftzufuhr gemäß Tabelle 8 anzugeben.
Tabelle 8 Pneumatische Systeme mit Überdruck - Menge der Luftzufuhr 22
| Menge der Luftzufuhr | Mittelschwere und schwere Lastkraftwagen (Teil von P184) | Schwere Busse (P309) |
| Kleiner Hubraum ≤ 250 cm3; 1 Zylinder/2 Zylinder | X | X |
| Mittlerer 250 cm3 < Hubraum ≤ 500 cm3; 1 Zylinder/2 Zylinder einstufig | X | X |
| Mittlerer 250 cm3 < Hubraum ≤ 500 cm3; 1 Zylinder/2 Zylinder zweistufig | X | X |
| Großer Hubraum > 500 cm 3; 1 Zylinder/2 Zylinder einstufig/zweistufig | X, DO | |
| Großer Hubraum > 500 cm3; Einstufig | X, DO | |
| Großer Hubraum > 500 cm3; Zweistufig | X |
Bei einem zweistufigen Kompressor ist die Verdrängung der ersten Stufe zu verwenden, um die Größe der Kompressoranlage zu beschreiben. Bei Nicht-Kolbenkompressoren ist als Technologie "default overall" (DO - Standard insgesamt) anzugeben.
Bei schweren Bussen mit elektrisch angetriebenen Kompressoren ist für die Menge der Luftzufuhr "not applicable" anzugeben, da dieser Parameter vom Simulationsinstrument nicht berücksichtigt wird.
3.4.1.2. Technologien zur Kraftstoffersparnis 22
Technologien zur Kraftstoffersparnis sind gemäß den in Tabelle 9 für mittlere und schwere Lastkraftwagen und Tabelle 10 für schwere Busse aufgeführten Kombinationen anzugeben.
Tabelle 9 Pneumatische Systeme mit Überdruck - Technologien zur Kraftstoffersparnis für schwere und mittelschwere Lastkraftwagen (Teil von P184) 19 22
| Kombination Nr. | Kompressorantrieb | Kompressorkupplung | Luftkompressor mit Energiesparsystem (ESS) | Belüftungssystem mit optimaler Regeneration (AMS) |
| 1 | mechanisch | nein | nein | nein |
| 2 | mechanisch | nein | ja | nein |
| 3 | mechanisch | Visco | nein | nein |
| 4 | mechanisch | mechanisch | nein | nein |
| 5 | mechanisch | nein | ja | ja |
| 6 | mechanisch | Visco | nein | ja |
| 7 | mechanisch | mechanisch | nein | ja |
| 8 | elektrisch | nein | nein | nein |
| 9 | elektrisch | nein | nein | ja |
Tabelle 10 Pneumatische Systeme mit Überdruck - Technologien zur Kraftstoffersparnis für schwere Busse
| Kombination Nr. | Kompressorantrieb (P310) | Kompressorkupplung (P311) | Intelligentes Regenerationssystem (P312) | Intelligentes Kompressionssystem (P313) |
| 1 | mechanisch | nein | nein | nein |
| 2 | mechanisch | nein | ja | nein |
| 3 | mechanisch | nein | nein | ja |
| 4 | mechanisch | nein | ja | ja |
| 5 | mechanisch | Visco | nein | nein |
| 6 | mechanisch | Visco | ja | nein |
| 7 | mechanisch | Visco | nein | ja |
| 8 | mechanisch | Visco | ja | ja |
| 9 | mechanisch | mechanisch | nein | nein |
| 10 | mechanisch | mechanisch | ja | nein |
| 11 | mechanisch | mechanisch | nein | ja |
| 12 | mechanisch | mechanisch | ja | ja |
| 13 | elektrisch | nein | nein | nein |
| 14 | elektrisch | nein | ja | nein |
3.4.1.3. Weitere Merkmale des pneumatischen Systems bei schweren Bussen 22
Bei schweren Bussen sind die Angaben zu weiteren Merkmalen des pneumatischen Systems gemäß Tabelle 11 zu machen.
Tabelle 11: Weitere Merkmale des pneumatischen Systems bei schweren Bussen 22
| Parameter | Parameter-ID | Eingabe in das Simulationsinstrument | Erläuterungen |
| "Ratio compressor to engine" | P314 | Wert in [-] | Verhältnis = Kompressordrehzahl/Motordrehzahl. Gilt nur für mechanisch angetriebene Kompressoren |
| "Entrance height in non-kneeled position" | P290 | Wert in [mm] | Gemäß der Begriffsbestimmung in Anhang III Nummer 2 Ziffer 10. Die Dokumentation dieses Wertes muss durch Zeichnungen zum Fahrzeugaufbau erfolgen, die bei der Parametrisierung der Luftfederungssteuerung des Fahrzeugs verwendet werden. Der Wert entspricht der normalen Fahrhöhe, mit der das Fahrzeug dem Kunden geliefert wird. Dieser Parameter ist nur für schwere Busse relevant. |
| "Air suspension control" | P315 | "mechanically"/"electronically" | |
| "Pneumatic SCR reagent dosing" | P316 | "true"/"false" | Siehe Nummer 2 Ziffer 36. |
| "Door drive technology" | P291 | "pneumatic"/"mixed"/"electric" |
3.4.2. Pneumatische Systeme, die mit Vakuum arbeiten 22
Bei Fahrzeugen mit pneumatischen Systemen, die mit Vakuum (relativem negativem Druck) arbeiten, ist entweder "Vacuum pump" oder "Vacuum pump + elec. driven" als Eingabe in das Simulationsinstrument zu verwenden (P184). Diese Technologie ist für schwere Busse nicht anwendbar.
3.5.1. HLK-Anlage für mittelschwere und schwere Lastkraftwagen 22
Die Technologie für die HLK-Anlage ist gemäß Tabelle 12 anzugeben.
Tabelle 12: HLK-Anlagentechnologien für mittelschwere und schwere Lastkraftwagen (P185) 22
|
Technologie |
| Keine (keine Klimaanlage für den Fahrerraum) |
| Standard |
3.5.2. HLK-Anlage für schwere Busse 22
Die HLK-Anlagenkonfiguration ist gemäß den Definitionen in Tabelle 13 anzugeben. Abbildung 2 enthält eine grafische Darstellung der verschiedenen Konfigurationen.
Tabelle 13: HLK-Anlagenkonfiguration für schwere Busse (P317) 22
| HLK-Anlagenkonfiguration | Thermisches Komfortsystem für den Fahrgastraum | Anzahl der Wärmepumpen für den Fahrgastraum gemäß Nummer 2 Ziffer 52 | Versorgung des Fahrerraums durch Wärmepumpe(n) für den Fahrgastraum | Unabhängige Wärmepumpe(n) für den Fahrerraum | |
| Starre Bauweise | Gelenkbauweise | ||||
| 1 | Nein | 0 | 0 | Nein | Nein |
| 2 | Nein | 0 | 0 | Nein | Ja |
| 3 | Ja | 0 | 0 | Nein | Nein |
| 4 | Ja | 0 | 0 | Nein | Ja |
| 5 | Ja | 1 | 1 oder 2 | Nein | Nein |
| 6 | Ja | 1 | 1 oder 2 | Ja | Nein |
| 7 | Ja | 1 | 1 oder 2 | Nein | Ja |
| 8 | Ja | > 1 | > 2 | Nein | Nein |
| 9 | Ja | > 1 | > 2 | Nein | Ja |
| 10 | Ja | > 1 | > 2 | Ja | Nein |
Abbildung 2:
HLK-Anlagenkonfiguration für schwere Busse (starre Bauweise und Gelenkbauweise) 22
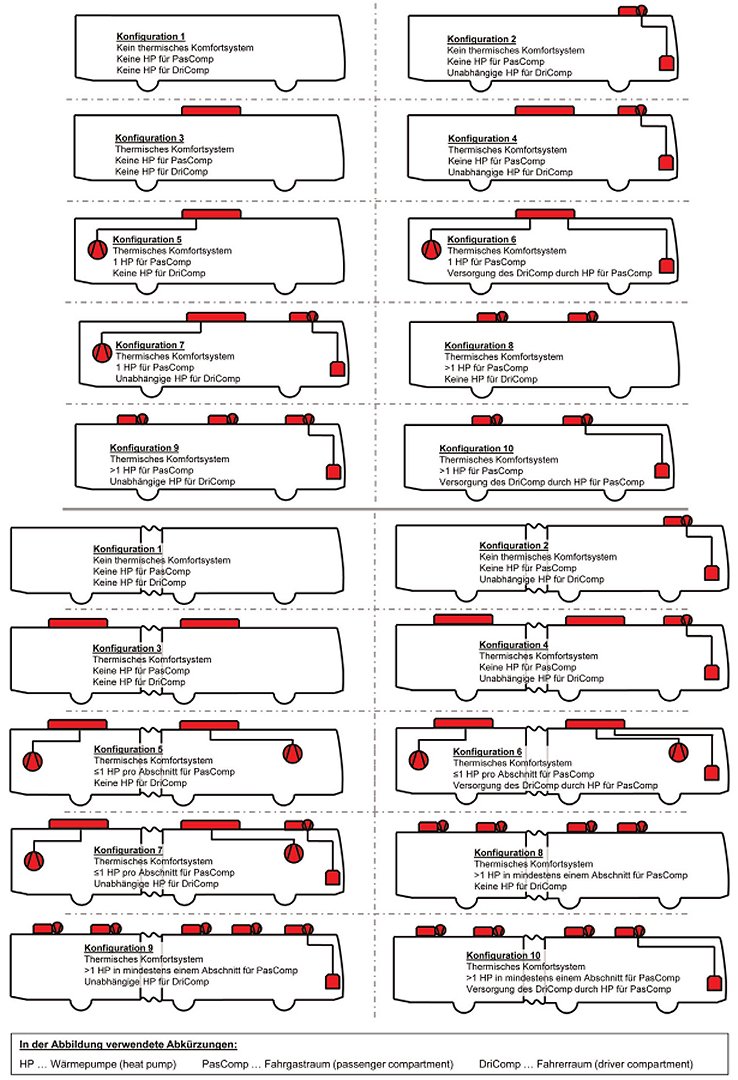
Die HLK-Anlagenparameter sind gemäß Tabelle 14 anzugeben.
Tabelle 14: HLK-Anlagenparameter (schwere Busse) 22
| Parameter | Parameter-ID | Eingabe in das Simulationsinstrument | Erläuterungen |
| "Heat pump type for cooling driver compartment" | P318 | "none"/"not applicable"/"R-744"/"non R-744 2-stage"/ "non R-744 3-stage"/"non R-744 4-stage"/"non R-744 continuous" | Für die HLK-Anlagekonfigurationen 6 und 10 ist aufgrund der Versorgung durch die Wärmepumpe auf der Beifahrerseite "nicht applicable" anzugeben. |
| "Heat pump type for heating driver compartment" | P319 | "none"/"not applicable"/"R-744"/"non R-744 2-stage"/ "non R-744 3-stage"/"non R-744 4-stage"/"non R-744 continuous" | Für die HLK-Anlagekonfigurationen 6 und 10 ist aufgrund der Versorgung durch die Wärmepumpe auf der Beifahrerseite "nicht applicable" anzugeben. |
| "Heat pump type for cooling passenger compartment" | P320 | "none"/"not applicable"/"R-744"/"non R-744 2-stage"/ "non R-744 3-stage"/"non R-744 4-stage"/"non R-744 continuous" | Bei mehreren Wärmepumpen mit unterschiedlichen Technologien zur Kühlung des Fahrgastraums ist die vorherrschende Technologie anzugeben (z.B. entsprechend der verfügbaren Leistung oder der bevorzugten Nutzung im Betrieb). |
| "Heat pump type for heating passenger compartment" | P321 | "none"/"not applicable"/"R-744"/"non R-744 2-stage"/ "non R-744 3-stage"/"non R-744 4-stage"/"non R-744 continuous" | Bei mehreren Wärmepumpen mit unterschiedlichen Technologien zur Beheizung des Fahrgastraums ist die vorherrschende Technologie anzugeben (z.B. entsprechend der verfügbaren Leistung oder der bevorzugten Nutzung im Betrieb). |
| "Auxiliary heater power" | P322 | Wert in [W] | Nennleistung gemäß den Spezifikationen für die Vorrichtung. Wenn keine Zusatzheizung installiert ist, ist "0" anzugeben. |
| "Double glazing" | P323 | "true"/"false" | |
| "Adjustable coolant thermostat" | P324 | "true"/"false" | |
| "Adjustable auxiliary heater" | P325 | "true"/"false" | |
| "Engine waste gas heat exchanger" | P326 | "true"/"false" | |
| "Separate air distribution ducts" | P327 | "true"/"false" | |
| "Water electric heater" | P328 | "true"/"false" | Eingabe nur für HEV und PEV erforderlich |
| "Air electric heater" | P329 | "true"/"false" | Eingabe nur für HEV und PEV erforderlich |
| "Other heating technology" | P330 | "true"/"false" | Eingabe nur für HEV und PEV erforderlich |
Bei schweren Lastkraftwagen, deren Getriebe einen Nebenabtrieb und/oder einen Nebenabtriebs-Antriebsmechanismus aufweist, ist die Leistungsaufnahme durch festgelegte generische Werte zu berücksichtigen. Diese stellen diese Leistungsverluste im normalen Antriebsmodus dar, wenn der Verbraucher, der an einen Nebenabtrieb angeschlossen ist, z.B. eine Hydraulikpumpe, abgeschaltet/unbetätigt ist. Anwendungsbezogene Leistungsaufnahmen bei zugeschaltetem Verbraucher werden vom Simulationsinstrument addiert und werden im Folgenden nicht beschrieben.
Tabelle 12: Mechanischer Leistungsbedarf von Nebenabtrieben mit abgeschalteten Verbrauchern für schwere Lastkraftwagen 22
| Bauartvarianten hinsichtlich Leistungsverlusten (im Vergleich zu einem Getriebe ohne Nebenabtrieb und/oder Nebenabtriebs-Antriebsmechanismus) | Leistungsverlust | |
| Zusätzliche für Schleppverluste maßgebliche Teile | ||
| Wellen/Zahnräder (P247) | Sonstige Elemente (P248) | [W] |
| Nur ein eingreifendes Zahnrad, über dem angegebenen Ölstand gelegen (ohne zusätzlichen Zahneingriff) | - | 0 |
| Nur Antriebswelle des Nebenabtriebs | Zahnkupplung (inkl. Synchronring) oder Schieberad | 50 |
| Nur Antriebswelle des Nebenabtriebs | Mehrscheibenkupplung | 350 |
| Nur Antriebswelle des Nebenabtriebs | Mehrscheibenkupplung mit spezieller Pumpe für Nebenabtriebskupplung | 3.000 |
| Antriebswelle und/oder bis zu 2 eingreifende Zahnräder | Zahnkupplung (inkl. Synchronring) oder Schieberad | 150 |
| Antriebswelle und/oder bis zu 2 eingreifende Zahnräder | Mehrscheibenkupplung | 400 |
| Antriebswelle und/oder bis zu 2 eingreifende Zahnräder | Mehrscheibenkupplung mit spezieller Pumpe für Nebenabtriebskupplung | 3.050 |
| Antriebswelle und/oder mehr als 2 eingreifende Zahnräder | Zahnkupplung (inkl. Synchronring) oder Schieberad | 200 |
| Antriebswelle und/oder mehr als 2 eingreifende Zahnräder | Mehrscheibenkupplung | 450 |
| Antriebswelle und/oder mehr als 2 eingreifende Zahnräder | Mehrscheibenkupplung mit spezieller Pumpe für Nebenabtriebskupplung | 3.100 |
| Nebenabtrieb mit einem oder mehr zusätzlichen Zahneingriffen, aber ohne Ausschaltkupplung | - | 1.500 |
Bei mehreren am Getriebe montierten Nebenabtrieben ist gemäß Tabelle 12 nur das in Bezug auf seine Kombination der Kriterien "PTOShaftsGearWheels" und "PTOShaftsOtherElements' verlustreichste Bauteil anzugeben. Bei mittelschweren Lastkraftwagen und schweren Bussen ist keine Angabe der am Getriebe montierten Nebenabtriebe erforderlich.
_______
1) Regelung Nr. 107 der Wirtschaftskommission für Europa der Vereinten Nationen (UNECE) - Einheitliche Bestimmungen für die Genehmigung von Fahrzeugen der Klassen M2 oder M3 hinsichtlich ihrer allgemeinen Konstruktionsmerkmale (ABl. L 52 vom 23.02.2018 S. 1).
2) Regelung Nr. 48 der Wirtschaftskommission der Vereinten Nationen für Europa (UNECE) - Einheitliche Bedingungen für die Genehmigung von Fahrzeugen hinsichtlich des Anbaus der Beleuchtungs- und Lichtsignaleinrichtungen (ABl. L 14 vom 16.01.2019 S. 42).
3) Regelung Nr. 122 der Wirtschaftskommission der Vereinten Nationen für Europa (UNECE) - Einheitliche technische Vorschriften für die Typgenehmigung von Fahrzeugen der Klassen M, N, und O hinsichtlich ihrer Heizungssysteme (ABl. L 19 vom 24.01.2020 S. 42).
| weiter. | |
...
X
⍂
↑
↓